






点击下方卡片,关注「3D视觉工坊」公众号
选择星标,干货第一时间送达
来源:3D视觉工坊
添加小助理:cv3d008,备注:方向+学校/公司+昵称,拉你入群。文末附3D视觉行业细分群。
扫描下方二维码,加入「3D视觉从入门到精通」知识星球,星球内凝聚了众多3D视觉实战问题,以及各个模块的学习资料:近20门秘制视频课程、最新顶会论文、计算机视觉书籍、优质3D视觉算法源码等。想要入门3D视觉、做项目、搞科研,欢迎扫码加入!

0.这篇文章干了啥?
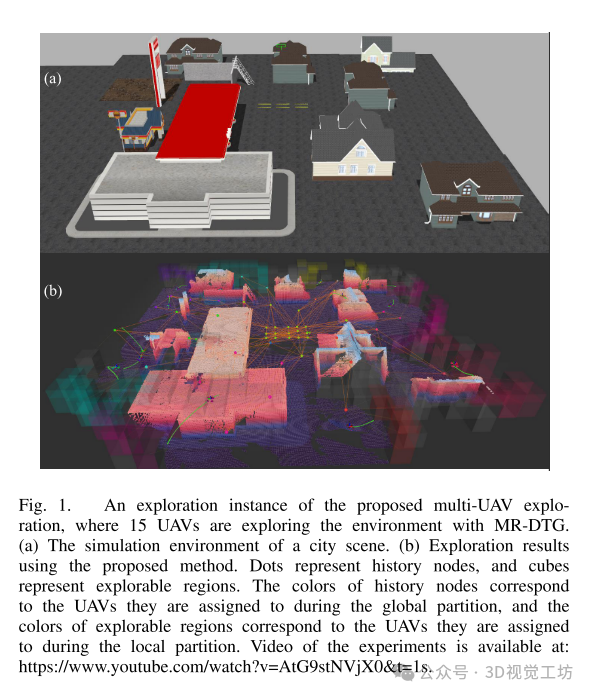
这篇文章提出了一种创新的多无人机(UAV)自主探索方法,结合了快速共享的多机器人动态拓扑图(MR-DTG)和图Voronoi划分,以提高探索效率并降低通信负担。通过在小型和大型迷宫的仿真环境中进行实验,研究表明,该方法显著减少了通信量(比现有的RACER方法减少了93.5%-95.5%),并在计算时间上优于RACER。此外,真实世界的户外实验也验证了该方法的有效性,显示了较低的通信量和较快的探索速度。然而,方法的局限性在于未考虑定位噪声,未来的工作将会针对多无人机系统的定位问题进行改进。
下面一起来阅读一下这项工作~
1. 论文信息
论文题目:Fast and Communication-Efficient Multi-UAV Exploration Via Voronoi Partition on Dynamic Topological Graph
作者:Qianli Dong, Haobo Xi等
作者机构:Nankai University
论文链接:https://arxiv.org/pdf/2408.05808
2. 摘要
有效的数据传输和合理的任务分配对于提高多机器人探索效率至关重要。然而,大多数通信数据类型通常包含冗余信息,因此需要大量的通信量。此外,面向探索的任务分配并非易事,特别是对于资源有限的无人机(UAV)而言更具挑战性。在本文中,我们提出了一种用于大规模环境探索的快速且通信高效的多无人机探索方法。我们首先设计了一个多机器人动态拓扑图(MR-DTG),该图由表示已探索和正在探索区域的节点以及连接节点的边构成。在MR-DTG的支持下,我们的方法通过仅传输探索规划所需的必要信息,实现了高效的通信。为了进一步提高探索效率,基于MR-DTG,我们设计了一种分层的多无人机探索方法。具体来说,图形Voronoi分割被用来将MR-DTG的节点分配给最近的无人机,考虑到实际的运动成本,从而实现了合理的任务分配。据我们所知,这是首次使用图形Voronoi分割来解决多无人机探索问题。通过仿真对比,该方法与一种最先进的方法进行了比较。结果表明,该方法能够将探索时间和通信量分别减少最多38.3%和95.5%。最后,我们在实际6架无人机的实验中验证了该方法的有效性。我们将公开源代码,以造福社区。
3. 效果展示
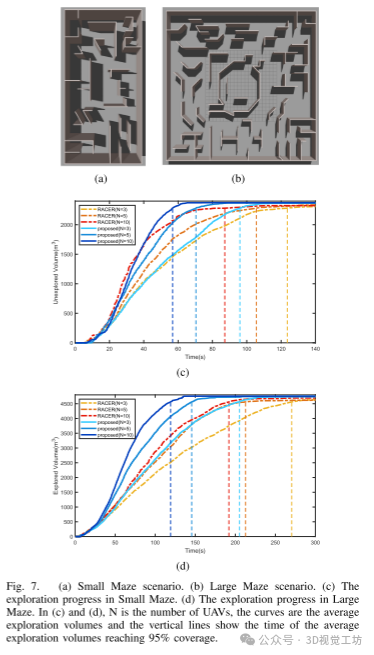
(a) 小型迷宫场景。(b) 大型迷宫场景。(c) 小型迷宫中的探索进展。(d) 大型迷宫中的探索进展。在(c)和(d)中,N表示无人机的数量,曲线表示平均探索体积,垂直线显示了平均探索体积达到95%覆盖率的时间。
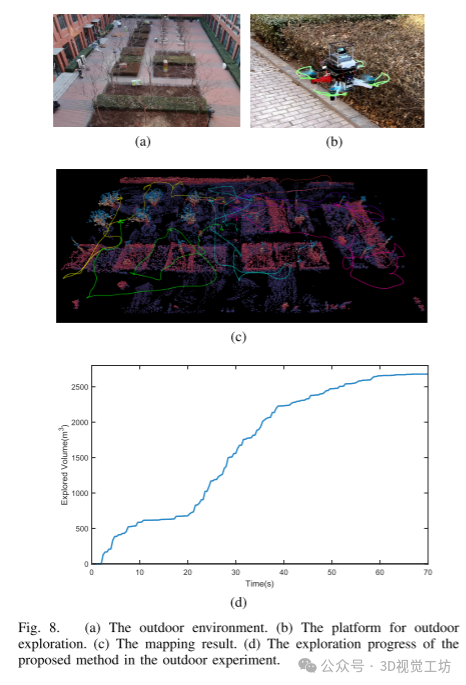
(a) 户外环境。(b) 户外探索平台。(c) 映射结果。(d) 提出的算法在户外实验中的探索进展。
4. 主要贡献
设计了一种新型的多机器人动态拓扑图,能够在保持探索规划所需必要信息的同时显著减少通信量。推荐学习:基于PX4实现的四旋翼建模与控制[理论+实战]
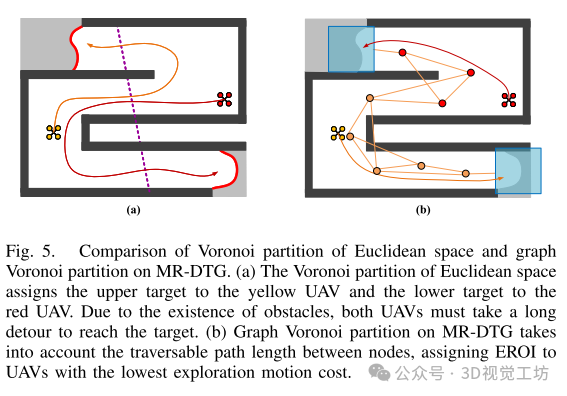
提出了一种分层的多无人机探索框架,利用MR-DTG上的图形Voronoi分割而非空间的欧几里得Voronoi分割,实现了合理的任务分配。
大量的仿真和实际实验验证了我们的方法在通信量和探索效率方面优于最先进的方法。我们将公开源代码以造福社区。
5. 基本原理是啥?
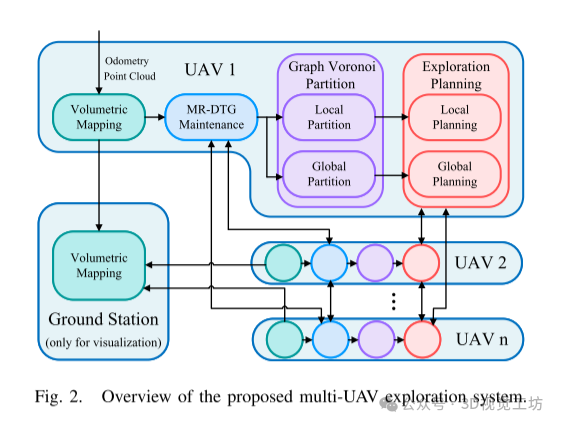
该方法的基本原理是通过构建一个多机器人动态拓扑图(Multi-Robot Dynamic Topological Graph, MR-DTG)和利用图Voronoi分割技术,来实现多无人机的自主探索任务。
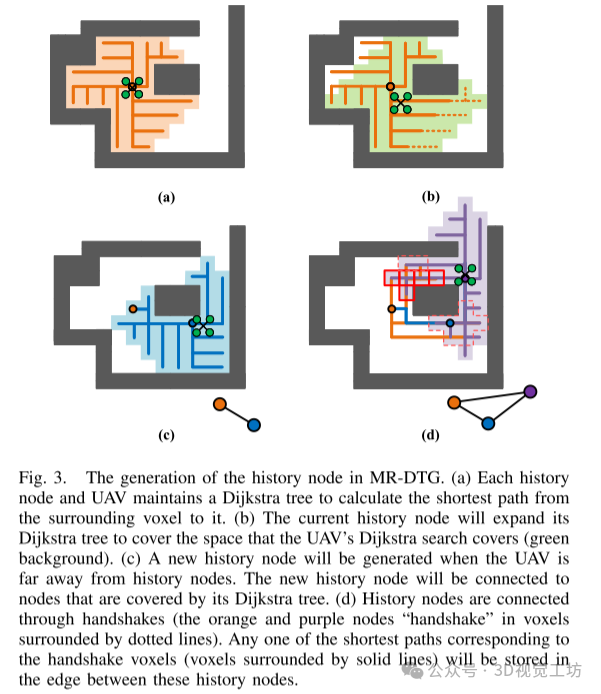
1. 多机器人动态拓扑图(MR-DTG)
MR-DTG 是一种简化的图结构,用于表示多个无人机在探索环境中的相对位置和信息。它动态更新并共享给所有无人机,确保每个无人机都能快速获得全局的探索信息,而无需传输大量数据。
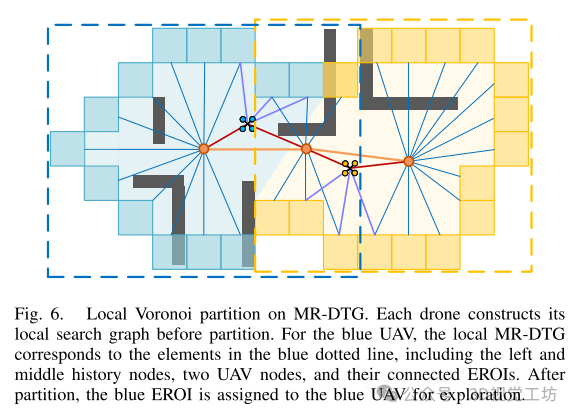
2. 图Voronoi分割
图Voronoi分割 技术将整个探索区域分割成多个子区域,每个子区域由一个无人机负责探索。通过这种方式,每个无人机在其负责的区域内进行自主探索,减少了重复探索的概率,提高了探索效率。
3. 层次化探索策略
该方法通过分层的方式组织无人机的探索过程。首先,使用MR-DTG提供全局的环境信息,其次,通过图Voronoi分割,将探索任务分配给各个无人机,从而确保整个区域能够被快速、高效地覆盖。
4. 通信优化
由于MR-DTG和图Voronoi分割方法只需传输少量的图结构信息,而不是大量的占用栅格图或原始传感器数据,整个系统的通信量大幅减少。这样,每个无人机能够在低通信开销的情况下,保持对全局环境的良好感知。
5. 实际应用
该方法不仅在仿真环境中表现出色,还在真实的三维多无人机探索任务中得到了验证,显示了其在复杂环境中的实用性和可靠性。
6. 实验结果
实验结果展示了所提出的方法在仿真环境和真实世界环境中的表现,并与当前最先进的多无人机自主探索方法进行了对比。
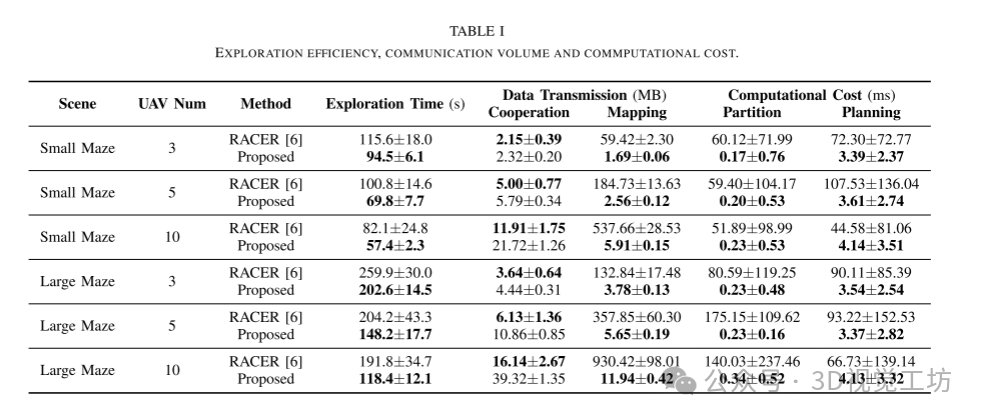
1. 仿真实验
实验在两个不同的复杂迷宫场景中进行:
小型迷宫(Small Maze): 尺寸为40×20×3米。
通信量:所提出的方法相比RACER减少了93.5%-95.6%的通信量。这是由于该方法只传输轻量级的MR-DTG,而非大量的占用栅格图。
计算时间:相比RACER,所提出的方法在计算时间上至少快一个数量级。虽然RACER的计算时间随着无人机数量的增加而减少,但由于RACER的配对合作策略没有考虑其他无人机的协同效果,因此效率不如本文方法。
探索效率:在不同数量的无人机下,所提出的方法的探索效率提高了18.3%-30.8%。
大型迷宫(Large Maze): 尺寸为40×40×3米。
通信量:相比RACER,所提出的方法减少了94.0%-95.5%的通信量,且计算性能与小型迷宫实验中一致。
计算时间:所提出的方法在计算时间上仍然保持优势,RACER在大规模环境下的计算成本显著增加,而所提出的方法由于MR-DTG的稀疏性,计算成本几乎可以忽略不计。
探索效率:所提出的方法在大型迷宫场景下的探索速度比RACER快了22.0%-38.3%。
2. 真实世界实验
实验环境:在一个40×24×3米的户外场景中进行了实验。该场景具有灌木等障碍物。
探索表现:6架无人机通过分布式轨迹在67.2秒内探索了大部分可探索空间。
通信量:整个多无人机系统的总通信量仅为14.47 MB。
结论:实验结果表明,所提出的方法在低通信流量和快速探索速度方面表现优异,并且能够在真实世界环境中有效应用。
7. 总结 & 未来工作
本文提出了一种基于快速共享多机器人动态拓扑图和图Voronoi分割的层次化探索方法,用于多无人机的快速自主探索。与当前最先进的方法相比,该方法在探索效率上更高,通信量更低。此外,实际环境实验表明,我们的方法可以有效应用于真实世界中的三维多无人机探索。然而,我们的方法存在一个局限性,即没有考虑定位噪声。在未来的工作中,我们将考虑在探索过程中多无人机系统的定位问题。
本文仅做学术分享,如有侵权,请联系删文。
3D视觉交流群,成立啦!
目前我们已经建立了3D视觉方向多个社群,包括2D计算机视觉、最前沿、工业3D视觉、SLAM、自动驾驶、三维重建、无人机等方向,细分群包括:
工业3D视觉:相机标定、立体匹配、三维点云、结构光、机械臂抓取、缺陷检测、6D位姿估计、相位偏折术、Halcon、摄影测量、阵列相机、光度立体视觉等。
SLAM:视觉SLAM、激光SLAM、语义SLAM、滤波算法、多传感器融合、多传感器标定、动态SLAM、MOT SLAM、NeRF SLAM、机器人导航等。
自动驾驶:深度估计、Transformer、毫米波|激光雷达|视觉摄像头传感器、多传感器标定、多传感器融合、自动驾驶综合群等、3D目标检测、路径规划、轨迹预测、3D点云分割、模型部署、车道线检测、Occupancy、目标跟踪等。
三维重建:3DGS、NeRF、多视图几何、OpenMVS、MVSNet、colmap、纹理贴图等
无人机:四旋翼建模、无人机飞控等
2D计算机视觉:图像分类/分割、目标/检测、医学影像、GAN、OCR、2D缺陷检测、遥感测绘、超分辨率、人脸检测、行为识别、模型量化剪枝、迁移学习、人体姿态估计等
最前沿:具身智能、大模型、Mamba、扩散模型等
除了这些,还有求职、硬件选型、视觉产品落地、产品、行业新闻等交流群
添加小助理: dddvision,备注:研究方向+学校/公司+昵称(如3D点云+清华+小草莓), 拉你入群。

3D视觉工坊知识星球
「3D视觉从入门到精通」知识星球,已沉淀6年,星球内资料包括:秘制视频课程近20门(包括结构光三维重建、相机标定、SLAM、深度估计、3D目标检测、3DGS顶会带读课程、三维点云等)、项目对接、3D视觉学习路线总结、最新顶会论文&代码、3D视觉行业最新模组、3D视觉优质源码汇总、书籍推荐、编程基础&学习工具、实战项目&作业、求职招聘&面经&面试题等等。欢迎加入3D视觉从入门到精通知识星球,一起学习进步。

具身智能、3DGS、NeRF、结构光、相位偏折术、机械臂抓取、点云实战、Open3D、缺陷检测、BEV感知、Occupancy、Transformer、模型部署、3D目标检测、深度估计、多传感器标定、规划与控制、无人机仿真、C++、三维视觉python、dToF、相机标定、ROS2、机器人控制规划、LeGo-LAOM、多模态融合SLAM、LOAM-SLAM、室内室外SLAM、VINS-Fusion、ORB-SLAM3、MVSNet三维重建、colmap、线面结构光、硬件结构光扫描仪等。

3D视觉模组选型:www.3dcver.com

— 完 —
点这里👇关注我,记得标星哦~
一键三连「分享」、「点赞」和「在看」
3D视觉科技前沿进展日日相见 ~



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









