






方向:三维重建-3DGS
导师一
导师二
导师三
方向:三维重建-结构光
导师一
导师二
方向:6D位姿估计、三维点云
导师一
导师二
方向:扩散模型&具身智能方向
导师一
方向:深度估计
导师一
方向:3D目标检测
导师一
方向:CNN&Transformer&Mamba方向
导师一
方向:医疗影像方向
导师一
方向:大模型&激光点云分割
导师一
方向:深度学习驱动的低光/雾霾/水下/模糊/反射/LDR图像和视频的质量评价/增强/复原/超分/重建
导师一
推荐以下课题,学员也可自带课题匹配老师

导师介绍
3D视觉工坊的导师来自海外QStop80、国内知名211、985高校的教授/博士导师/博士后、世界一流科技公司算法工程师。
限于篇幅,以下展示部分导师。
方向:三维重建-3DGS

导师一
Mark
海外QStop80名校博士后。
个人成就
研究领域为视觉、激光雷达SLAM,3D Gaussian Splatting,在IEEE RA-L, ICRA、ECCV、CVPR等国际顶级期刊会议上发表论文数十篇。同时担任机器人,计算机视觉会议T- RO、RA-L、3DV, IROS、ICRA等期刊会议的审稿人。论文辅导经验丰富,指导过国内外多位硕博士学生,在顶会顶刊上上以第一作者发表高水平论文。
研究/辅导方向
3D Gaussian Splatting、SLAM、6D位姿估计
导师二
Jack
985高校博士,荣誉包括:优博、国家奖学金。
个人成就
2022-2023期间,发表NeRF/GS-SLAM系统相关论文13篇。其中7篇计算机视觉顶级会议和期刊文章一作,包括ICCV、CVPR、ECCV、NIPS、RA-L、TIM。
研究/辅导方向NERF/SLAM、GS-SLAM、SLAM、单目深度估计
导师三
Amos
985本硕博,荣誉包括:国家奖学金、优秀研究生等。
个人成就
在机器人顶会、SCI1区TOP期刊等发表动态/物体级SLAM系统相关论文7篇,包括TCSVT(中科院1区TOP期刊,IF=8.3)、RAL(机器人领域顶刊)、IROS(机器人领域顶会)、3DV等。论文辅导经验丰富,曾指导多人发表顶会论文。
研究/辅导方向
视觉SLAM,包括面向动态场景的SLAM、物体级SLAM、基于平面特征的SLAM、GS-based-SLAM、AR等。
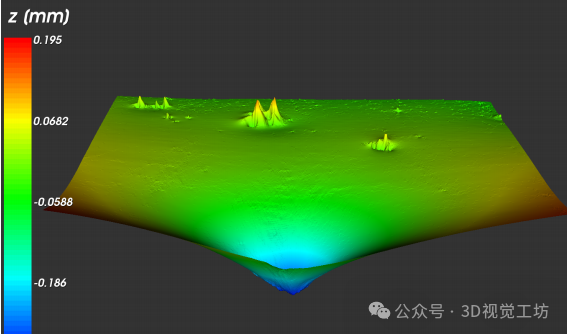
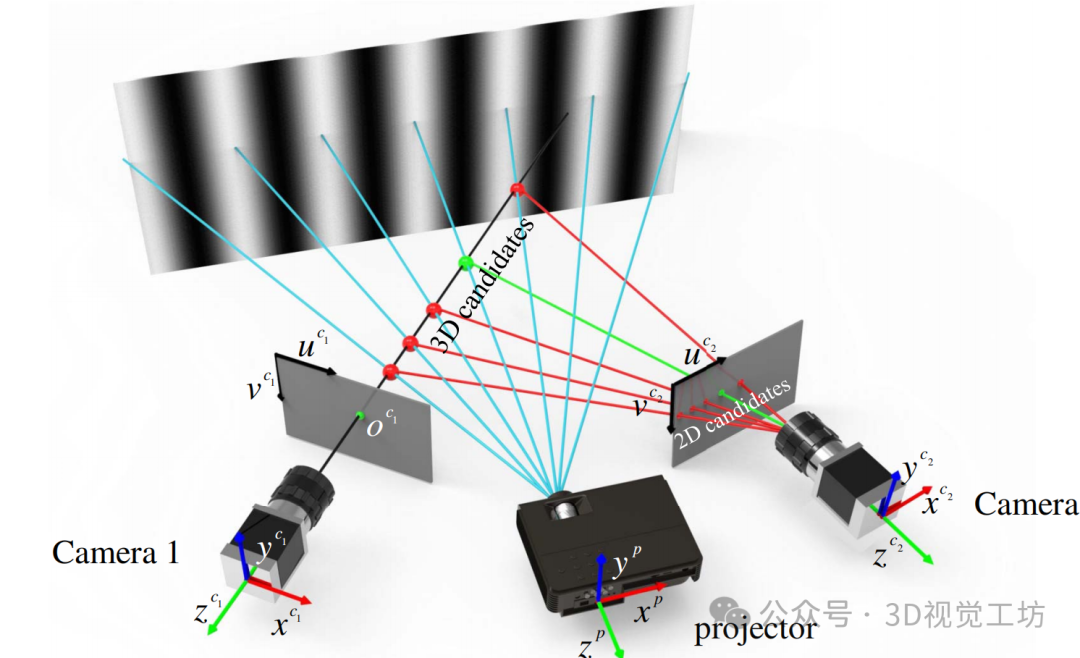
方向:三维重建-结构光
导师一
高老师
清华大学博士。
个人成就
导师高导师在光学测量领域取得了卓越的成就。他的研究成果多次发表在包括《Measurement》、《Applied Physics Letters (APL)》、《Optics Express (OE)》、《Optics Letters (OL)》等知名期刊上,并积极参与国际会议并担任报告人。作为一位资深导师,高导师在论文指导和辅导方面经验丰富,曾指导多位研究生学生,在《Measurement》等期刊及相关会议上以第一作者身份发表了多篇高水平论文。
研究/辅导方向
相位偏折术。
导师二
Wendy
知名高校老师。
个人成就
在Optics Express,Signal Processing,Optics and Lasers in Engineering, IEEE Transcations of Instrumentation & Measurement等著名期刊发表学术论文十余篇,担任Light: Science & Applications、APL Photonics、Photonics Research等高水平期刊审稿人
研究/辅导方向
结构光测量、无损检测。
方向:6D位姿估计、三维点云

导师一
Bard
海外QStop80名校博士后。
个人成就
研究领域为视觉、3D Gaussian Splatting、6D位姿估计,在IEEE RA-L, ICRA、ECCV、CVPR等国际顶级期刊会议上发表论文数十篇。同时担任机器人,计算机视觉会议T- RO、RA-L、3DV, IROS、ICRA等期刊会议的审稿人。论文辅导经验丰富,指导过国内外多位硕博士学生,在顶会顶刊上上以第一作者发表高水平论文。
研究/辅导方向
6D位姿估计。
导师二
Michael
top2大学本博,曾于自动驾驶公司从事仿真、感知、SLAM、定位、标定等工作,现top2大学博后。长期专注位姿估计与三维重建等相关方向,接顶会、一区二区意向学员。
个人成就
在TPAMI, IJCV, CVPR, ICCV, ECCV, ICRA等国际知名期刊和会议上发表论文10余篇,谷歌学术引用1800+,担任各顶级期刊与会议审稿人。论文指导经验丰富,近两年来已指导数名学生发表顶会论文。
研究/辅导方向
物体位姿估计,点云配准,三维重建/生成等。
方向:扩散模型&具身智能方向

导师一
Mike
国内Top 2本博,现Top 2大学老师。
个人成就
在顶级国际会议及期刊CVPR/ICCV/ECCV/3DV/NeurIPS/ICLR/ICRA/IROS/SIGGRAPH及期刊T-PAMI/IJCV/CVIU/IVC/ISPRS/T-IP/T-MM/CIBM/RA-L 等发表论文40余篇。担任各顶级期刊和会议审稿人。多次获得顶级会议的最佳论文。
研究/辅导方向
具身智能、扩散模型、神经渲染。
方向:深度估计

导师一
Tom
知名高校老师。
个人成就
曾发表T-PAMI、ICCV、TMM等高水平文章。
研究/辅导方向
单目深度估计(主)、光流以及立体匹配(辅)。
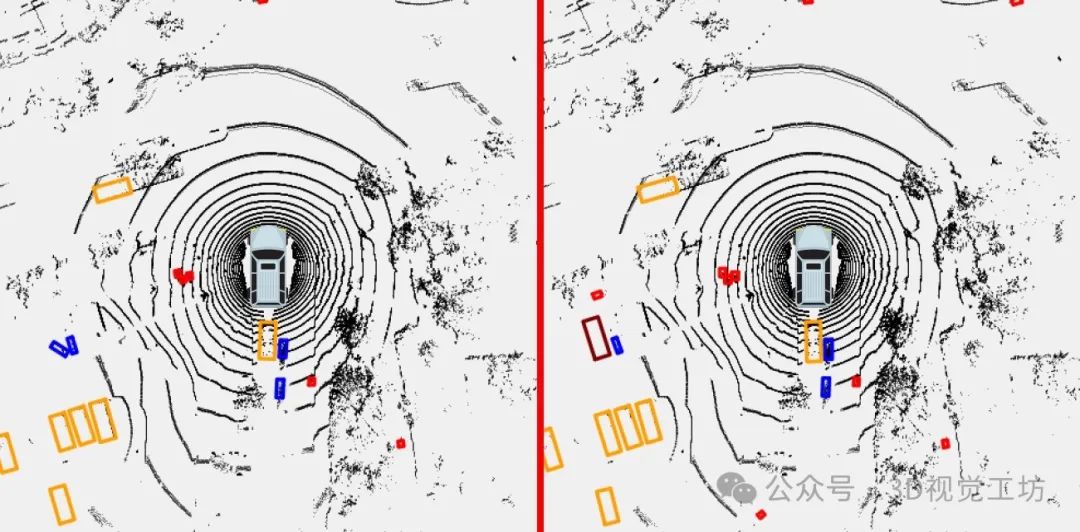
方向:3D目标检测
导师一
Nick
国内Top 2高校计算机系博士。
个人成就
在CVPR、ECCV、NeurIPS等国际顶级会议上发表多篇论文,担任CVPR、ICCV、ECCV、NeurIPS、TPAMI、TIP等顶级会议或期刊审稿人。带过多人发过顶会。
研究/辅导方向
计算机视觉,2D&3D感知,包括物体检测与分割等方向
方向:CNN&Transformer&Mamba方向
导师一
David
C9名校毕业。
个人成就
研究领域广阔,包括信号处理、凸优化、各垂直领域如医学、自动驾驶、遥感、机械等视觉任务,对有线电视 新闻网,变压器,曼巴具有深刻理解。在电子与信息学报、国际期刊、Q3等国际期刊会议上发表论文数篇。校优秀毕业生,国奖获得者。指导过国内外数十位硕士学生,完成硕士毕设的同时,发表多高水平文章。
论文辅导经验丰富,指导过数十位硕士学生,顺利完成毕设的同时,并发表多篇高水平文章。擅长站在学生角度,引导学生建立科研学术思维。学生期间曾担任五年线上高中物理辅导老师,辅导过上百位学生,最高已被浙大录取!对算法具有深刻理解,擅长引领学生建立算法思维,创新思维。
研究/辅导方向
雷达信号处理、凸优化、各垂直领域场景视觉任务(分类、分割、检测、估计、增强、重建、超分)
方向:医疗影像方向
导师一
Haward
中科院博后。
个人成就
研究领域为手术导航(3D重建与配准)、医疗仿真(计算机图形学)、医学影像等。在ieee trans、computer and program in biomedine等top期刊发表论文十余篇。论文辅导经验丰富,指导多名硕博完成毕业设计,均发表top期刊论文。
研究/辅导方向
3D重建与配准、医疗仿真、手术规划与导航等。
方向:大模型&激光点云分割
导师一
Xiao
海外QS top 30名校博士
个人成就
在CVPR/ICCV/ECCV/NeurIPS/TPAMI等国际顶级会议和期刊上发表论文数十篇,谷歌引用2K+,长期担任CVPR/ICCV/ECCV/NeurIPS/ICLR/AAAI等会议和期刊的审稿人。论文辅导经验丰富,指导过国内外多位硕博士学生,在顶会顶刊上上以第一作者发表高水平论文。
研究/辅导方向
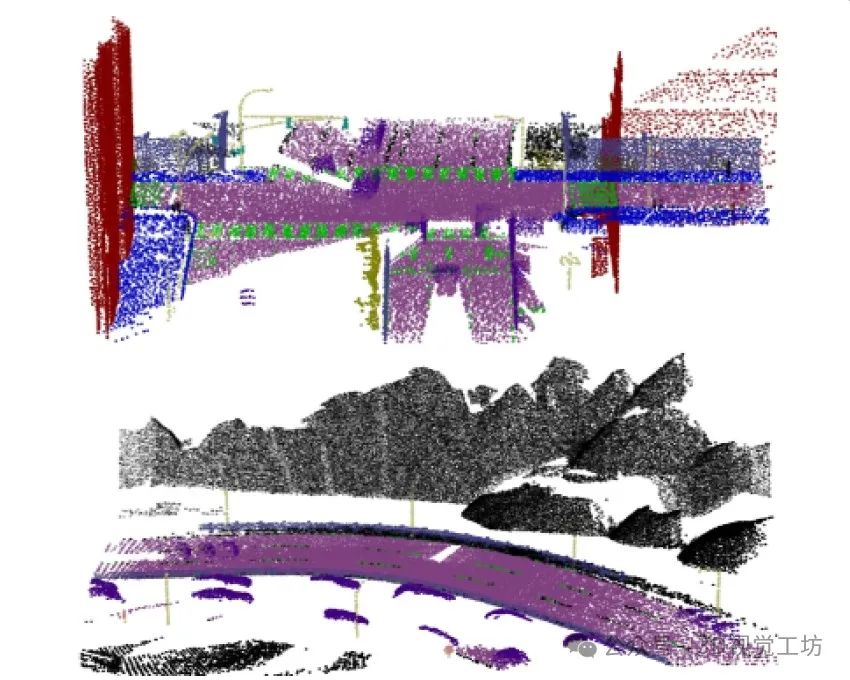
大模型、激光点云分割。
方向:深度学习驱动的低光/雾霾/水下/模糊/反射/LDR图像和视频的质量评价/增强/复原/超分/重建
导师一
Able
中科院博士
长期从事底层视觉处理任务的研究,近年来主要研究兴趣为开放环境下视觉内容增强探索不同环境下各类内容增强问题,包括深度学习驱动的低光/雾霾/水下/模糊/反射/LDR图像和视频的质量评价/增强/复原/超分/重建等。
个人成就
以第一或者通信作者发表论文多篇顶会。目前担任多位诺贝尔奖获得者推荐的国际顶级书籍/杂志出版社Bentham Science Publisher中XX专栏的副主编,并且担任国际和国内多个会议/期刊的特邀审稿专家,包括T-II,T-CSVT,SPL,TVCJ,PRCV等。
研究/辅导方向
深度学习驱动的低光/雾霾/水下/模糊/反射/LDR图像和视频的质量评价/增强/复原/超分/重建等。


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









