






话不多说,这里给大家赠送一张66元星球优惠券,限时使用。

经常有粉丝后台问这样一个问题:
「3D视觉从入门到精通」知识星球,里面有什么内容?加入星球,是不是可以学习课程呢?星球里会发布顶会论文等最新动态吗?
今天,咱们一起聊一聊这个沉淀了6年的3D视觉技术圈子。
一 什么是知识星球?
知识星球是一个高度活跃的社区平台,在这里你可以和相同研究方向的小伙伴一起探讨科研工作难题、交流最新领域进展、分享3D视觉最新顶会论文&代码资料、分享视频(讲解3D视觉重要知识点)、发布高质量的求职就业信息,承接项目等,当然还可以侃侃而谈,吐槽学习工作生活。
二 「3D视觉从入门到精通」知识星球
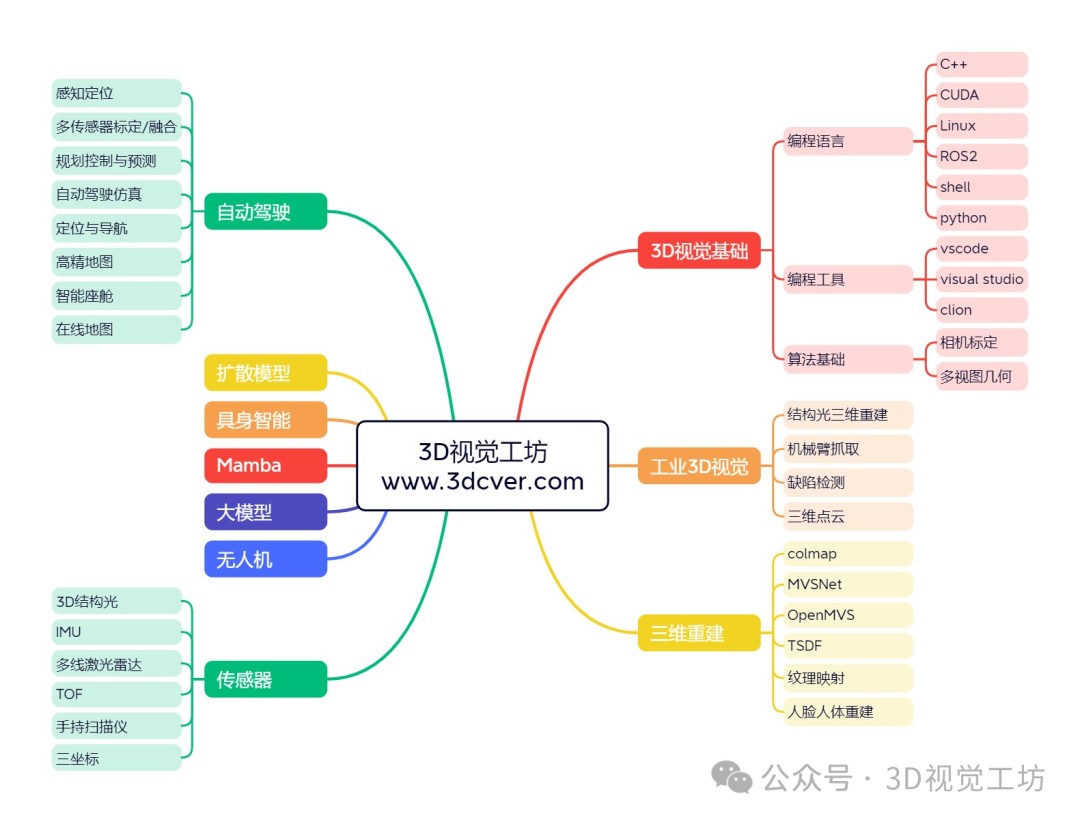
目前已有近5800多名活跃成员,主要涉及这五大方向:工业3D视觉、SLAM、自动驾驶、三维重建、无人机、具身智能、大模型方向。
细分方向众多,包括:相机标定、结构光、3DGS等三维重建、三维点云、缺陷检测、机械臂抓取、激光/视觉/多模态SLAM、自动驾驶、深度估计、模型部署、Transformer、3D目标检测、深度学习、视觉竞赛、硬件选型、视觉产品落地经验分享、学术&求职交流等。我们也会紧跟前沿科技发展,对于Mamba、具身智能、大模型等,在我们星球里也是热门讨论话题。
| 「3D视觉从入门到精通」知识星球特点 | ||
|---|---|---|
| 国内成立最早 | 近20门独家视频 | 3D视觉精华问答 |
| 最新顶会论文与代码分享 | 顶会作者直播 | 专业智囊团队答疑解惑 |
| 最新前沿技术研讨会,比如3DGS | 高质量项目对接 | 各个模块的源码梳理 |
| 最新行业招聘信息 | 求职面经 | 科研生活吐槽 |
| 行业最新模组分享 | 随时提问交流 | 每月积分榜奖励 |

三 星球内独家秘制课程


基础课程
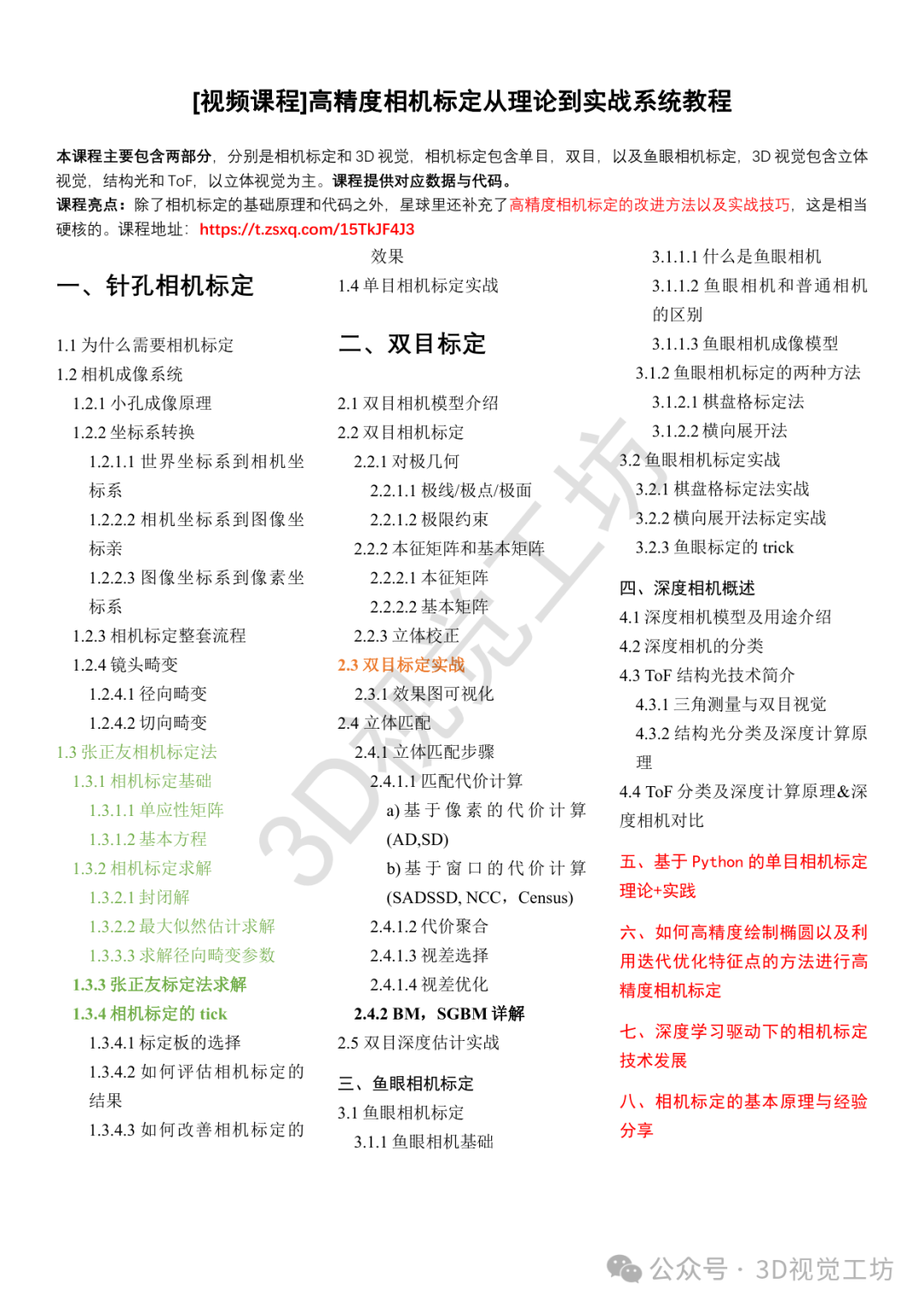
3.1 高精度相机标定从理论到实战系统教程
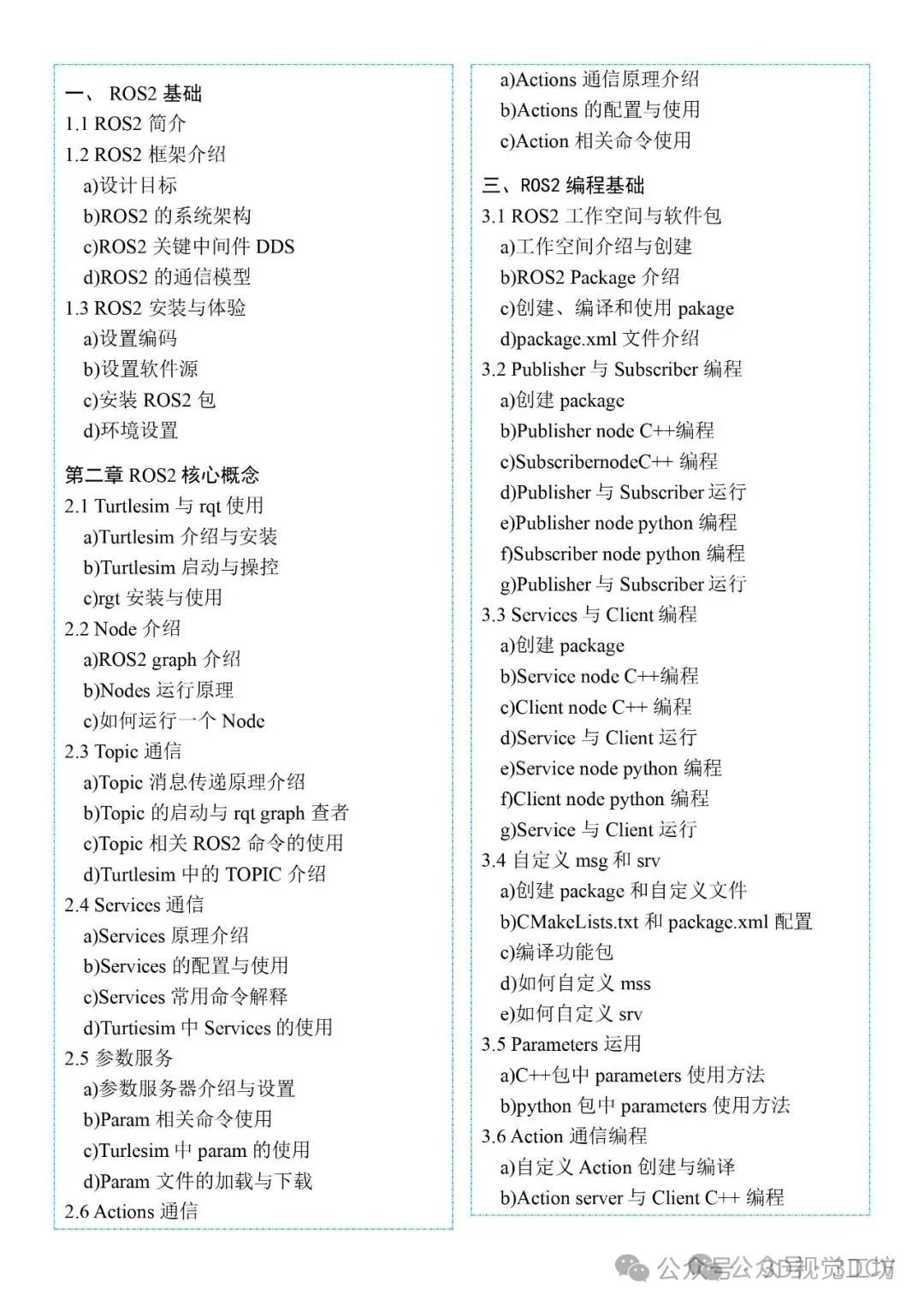
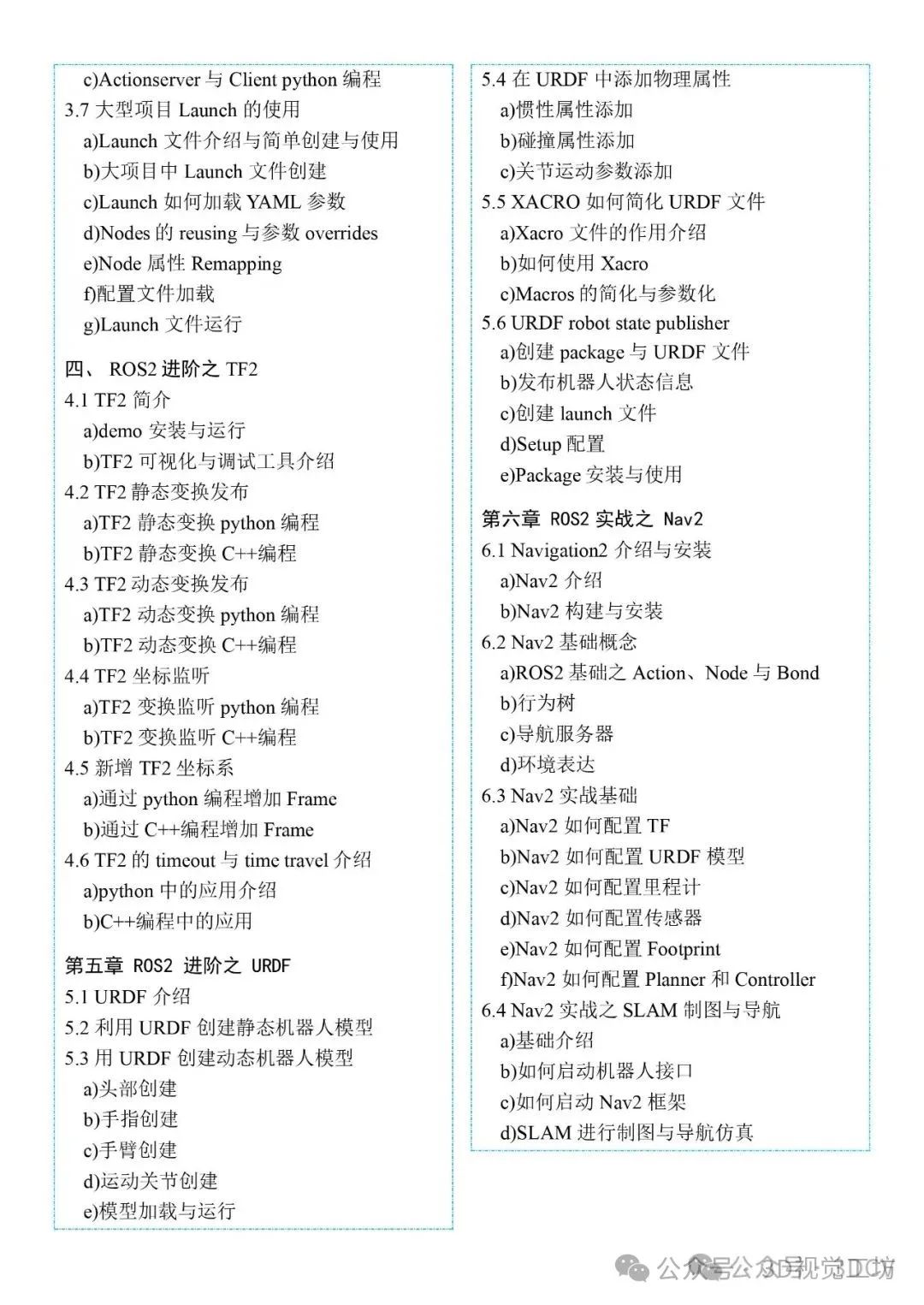
3.2 ROS2从入门到实战视频教程
ROS2从入门到实战视频教程,从小白方式介绍到高阶使用讲解,对ROS2进行全面的实操教学训练,为大家提供系统性的学习机会。
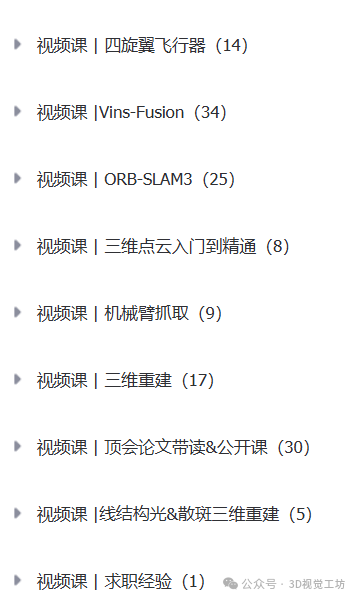
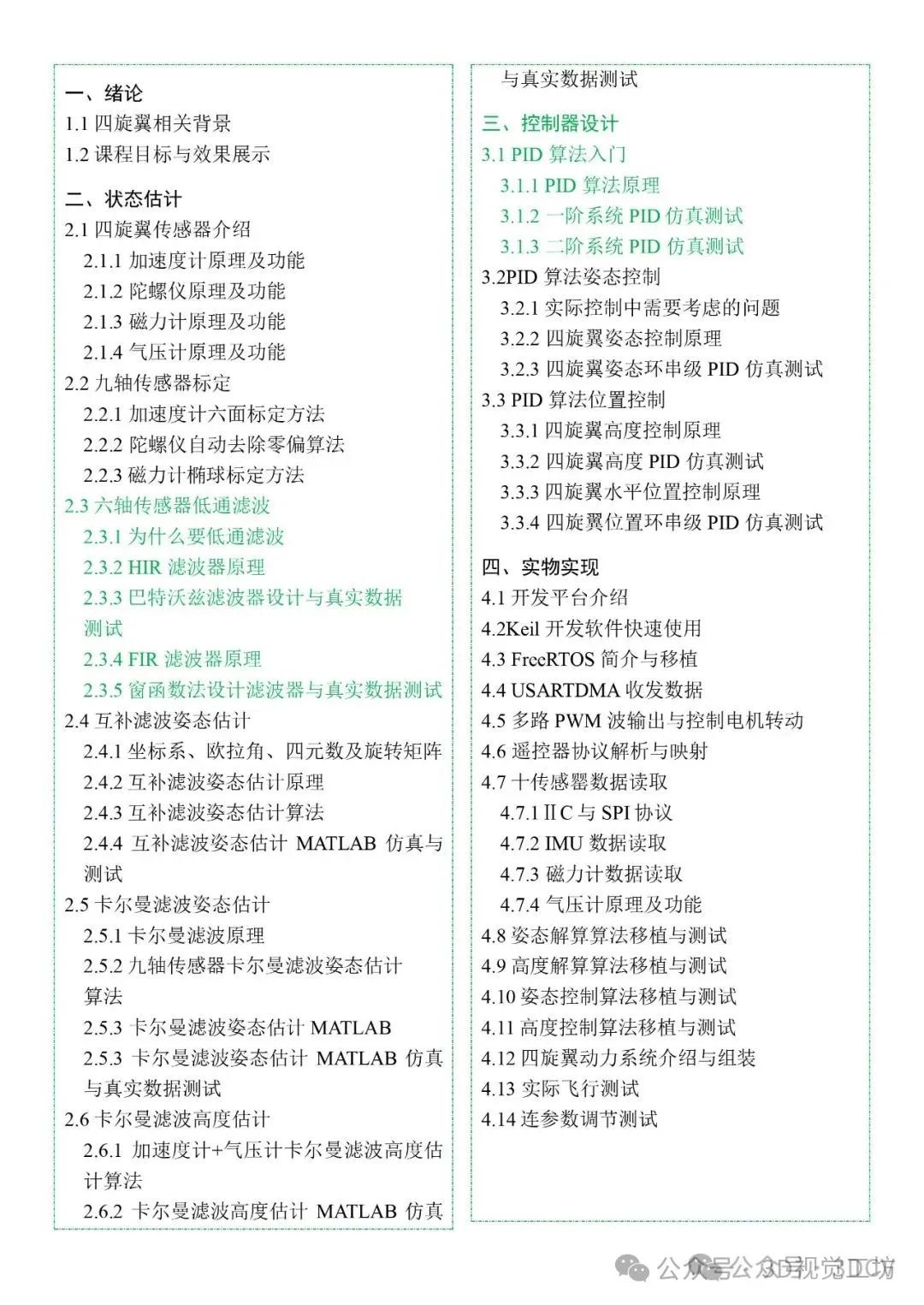
3.3 四旋翼飞行器:算法与实战
工业3D视觉系列视频课程
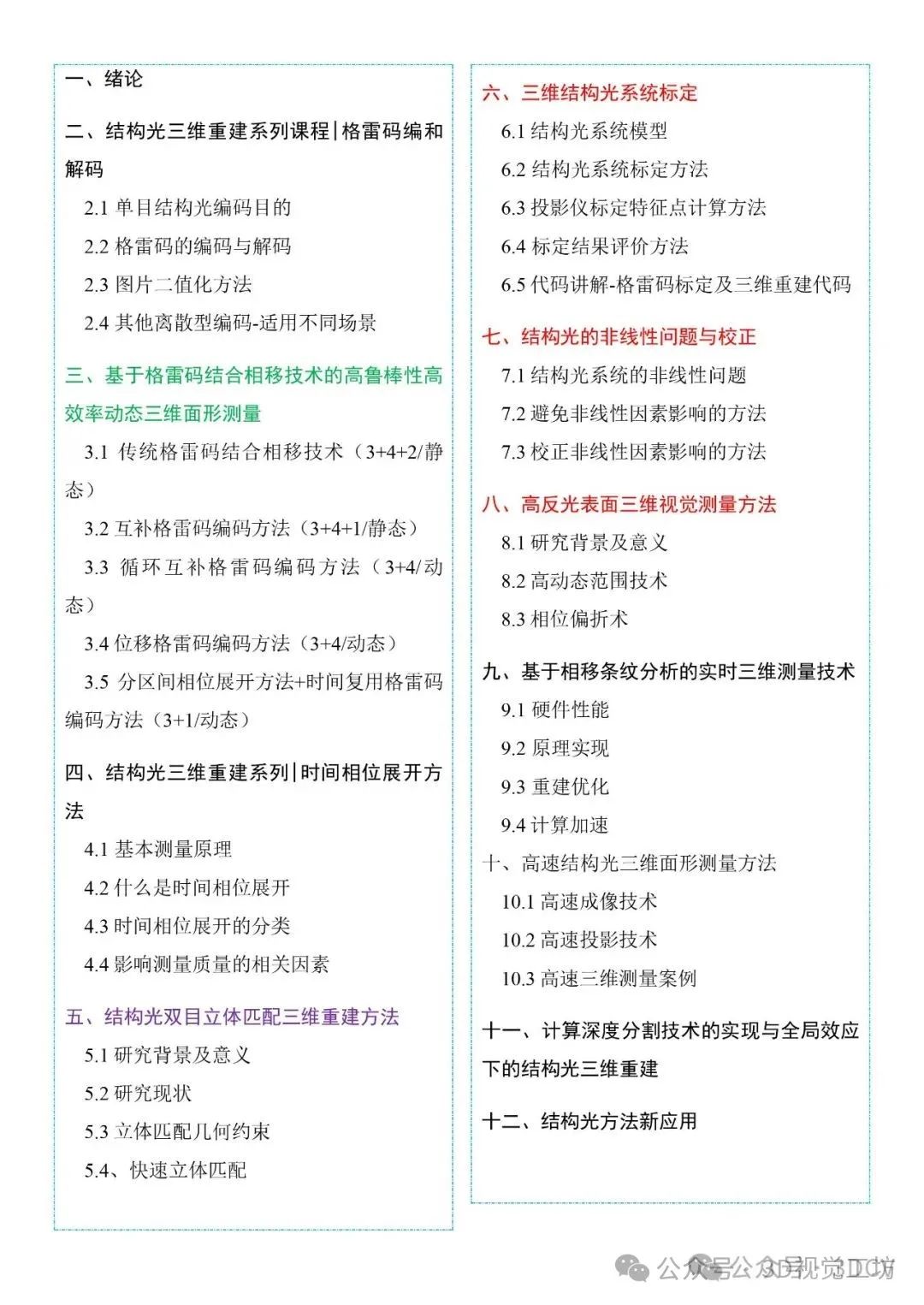
3.4 基于面结构光三维重建系列视频
主讲老师团队包括:吴周杰博士、邓博、书涵、张琼仪、杨洋博士、郭文博博士等。

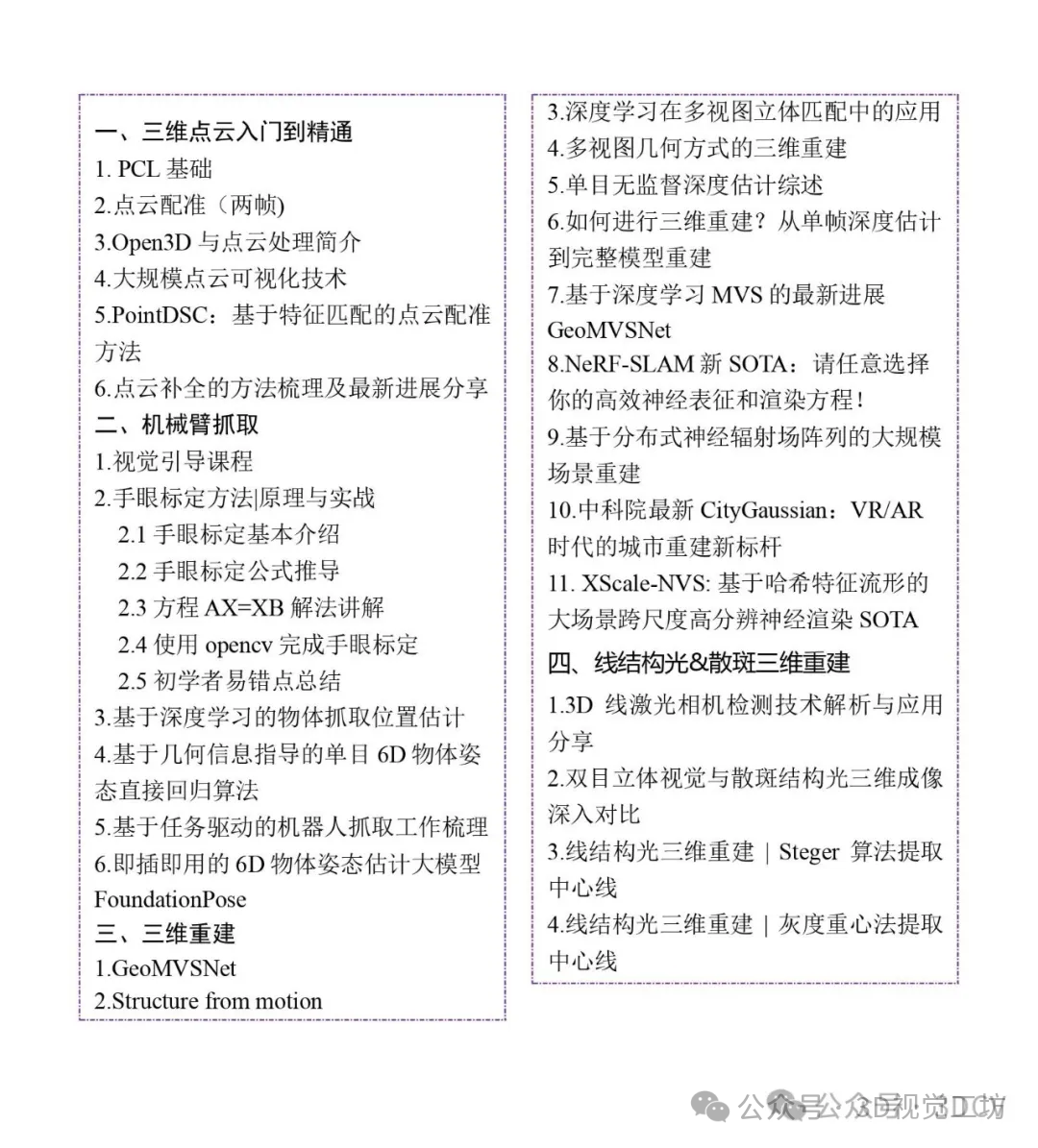
3.5 机械臂抓取、三维点云、三维重建等
3.6 3DGS三维重建直播研讨会


SLAM系列视频
3.7 如何轻松拿捏LIO-SAM?(提供注释版本代码)
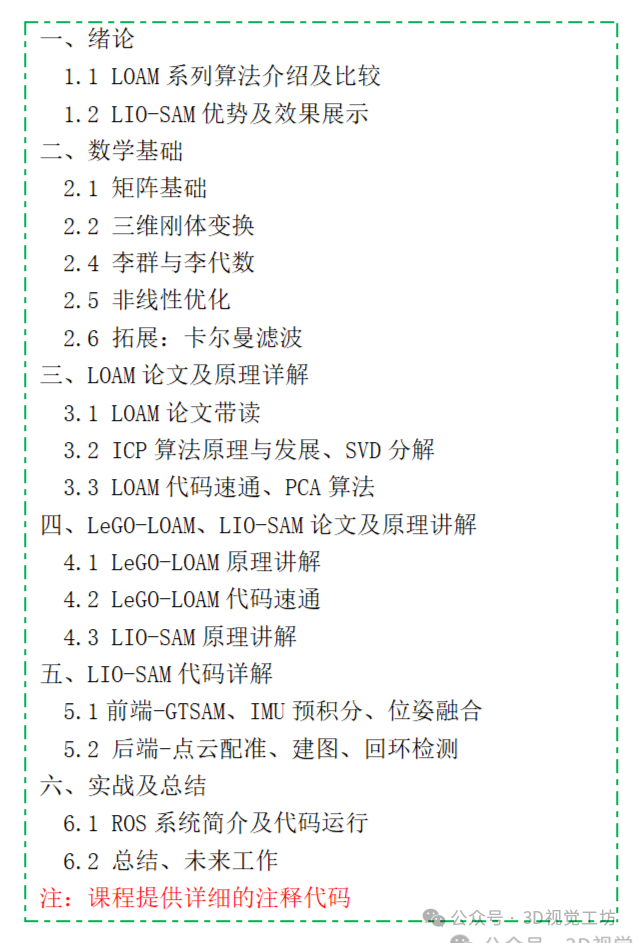
3.8 彻底剖析激光-视觉-IMU-GPS融合SLAM算法:理论推导、代码讲解和实战系列视频
多模态融合 SLAM 的门槛较高,在需要视觉 SLAM 与激光 SLAM 的基础之外,还会遇到不同模态测量的融合,不同传感器的时间同步,多传感器的外参标定,多传感器异常检测等问题,使得各位同学做这块的时候遇到诸多障碍。因此我们联合机器人学国家重点实验室的博士大佬推出这门课程,从理论和代码实现两个方面对激光雷达-视觉IMU-GPS 融合的 SLAM 算法框架和技术难点进行讲解,并且博士大佬会根据自己多年的机器人工程经验,向大家讲解在实际机器人应用中多模态融合的方法和技巧。

3.9 ORB-SLAM3理论基础+关键技术详解

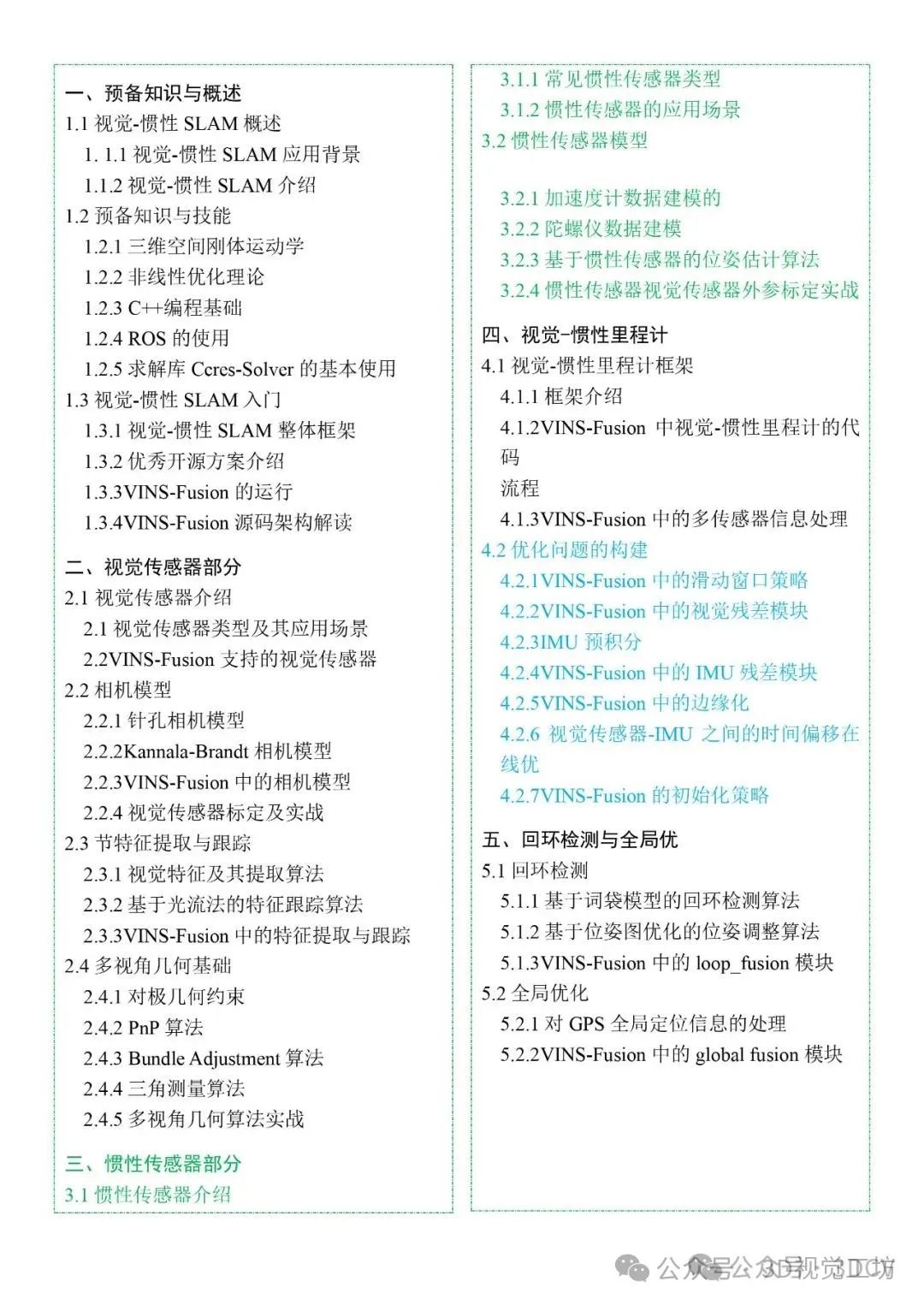
3.8 视觉-惯性SLAM:VINS-Fusion原理精讲
视觉-惯性SLAM所涉及的理论深度较深、覆盖面广,并对工程实践能力要求也较高,新手自学时相对比较困难。当下虽然有很多丰富的理论资料和优秀的相关开源项目,但是许多童鞋面对海量的理论资料、复杂的开源项目时可能无从下手,前期学习曲线过于陡峭,不得不放弃继续深入。为此,我们推出了《视觉-惯性SLAM的入门与实践》课程,结合VINS-Fusion 源码,系统地对视觉-惯性 SLAM 的基础理论知识进行梳理。整套课程由一线算法工程师教授,从基础理论到代码剖析,保姆级教学,助力学员一步步从小白成长为大牛。
自动驾驶
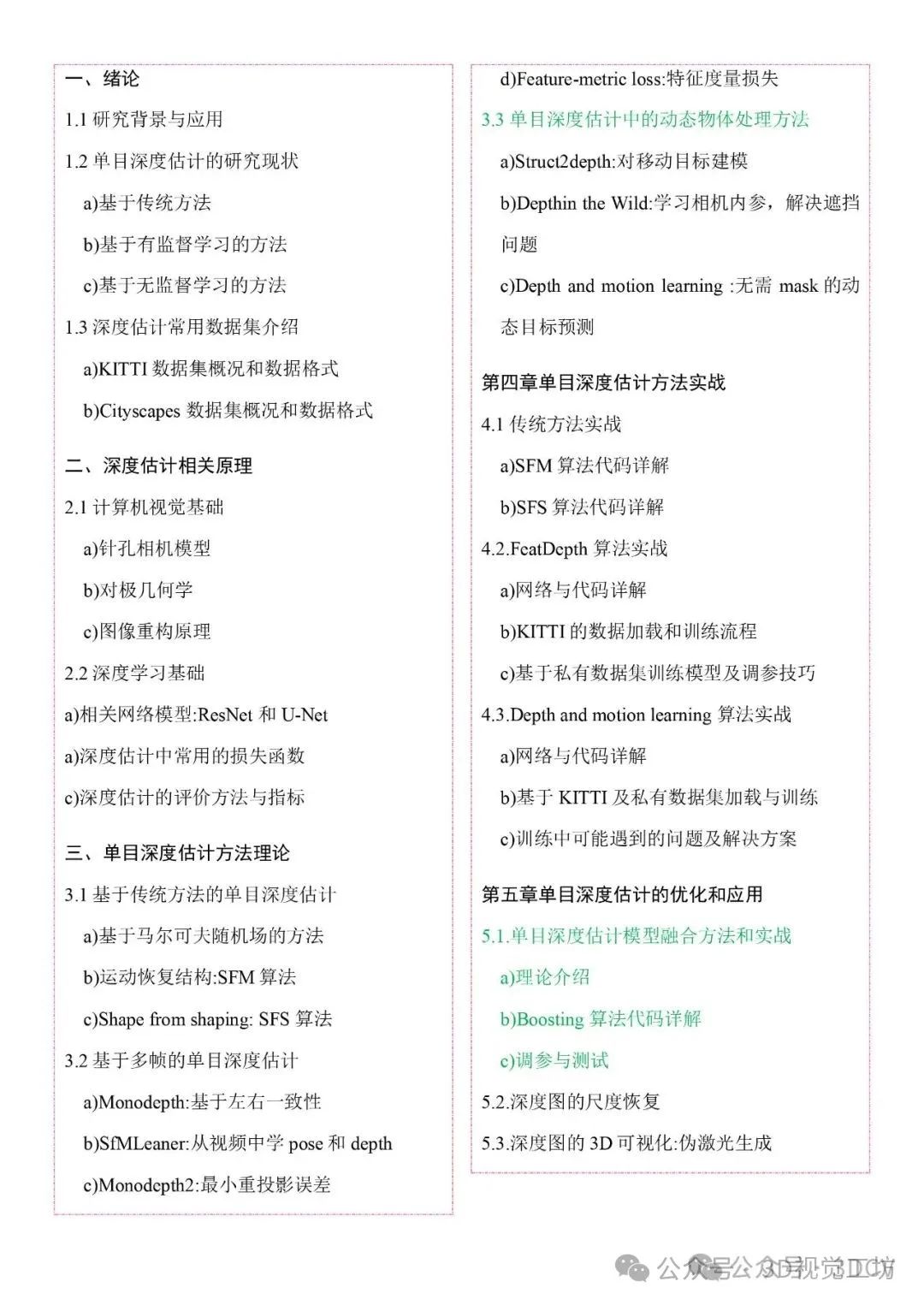
3.9 单目深度估计方法:理论与实战视频
视频教程主要分为两大部分:理论篇和实战篇,由于有监督方法的深度真值获取困难,且无监督方法的效果与有监督方法几乎相当,我们将课程的重心放在了无监督方法上。
其中,理论篇主要包括:深度估计相关的损失函数、评价指标等基础理论,传统深度估计方法、无监督深度估计方法等理论知识。实战部分包括:传统深度估计方法和深度学习方法,偏向于无监督深度估计以及相关应用等等。
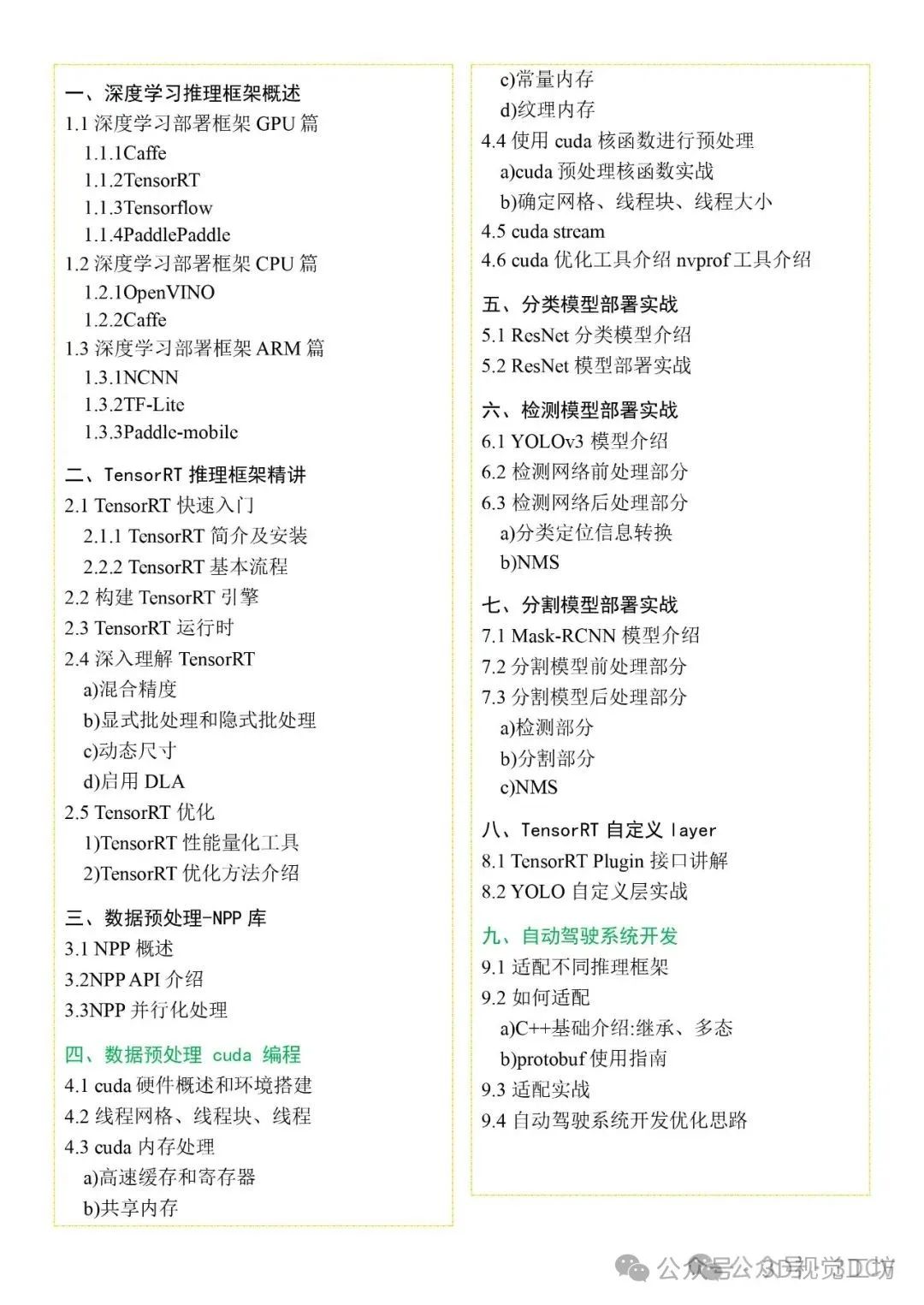
3.10 自动驾驶中的深度学习模型部署实战视频
本视频教程将采用理论和实践相结合的思路,首先对TensorRT的编程模型以及GPU/cuda的相关知识进行讲解,带领大家达到知其所以然的程度;之后课程将用分类、检测、分割三个例子来展示详细编程流程,并给出相关代码,达到真正能落地的工业级分享。
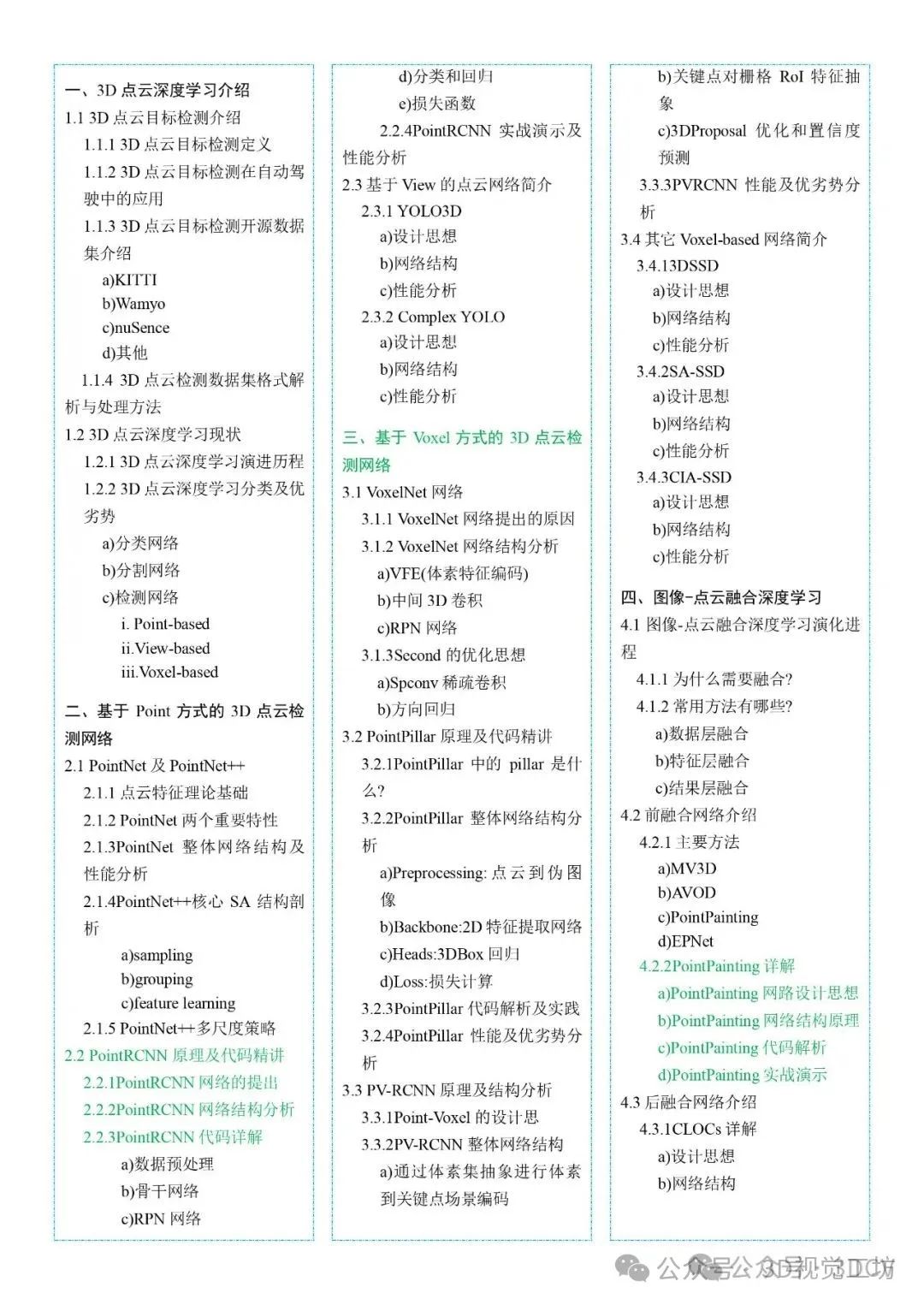
3.11 面向自动驾驶领域的3D点云深度学习目标检测系列视频
本视频教程以3D点云深度学习为主,对Point-based和Voxel-based系列的3D目标检测网络架构进行系统剖析和代码梳理,助力各位同学在点云深度学习更快的入门和更深的理解。
学习3D视觉核心技术,扫描查看介绍,3天内无条件退款
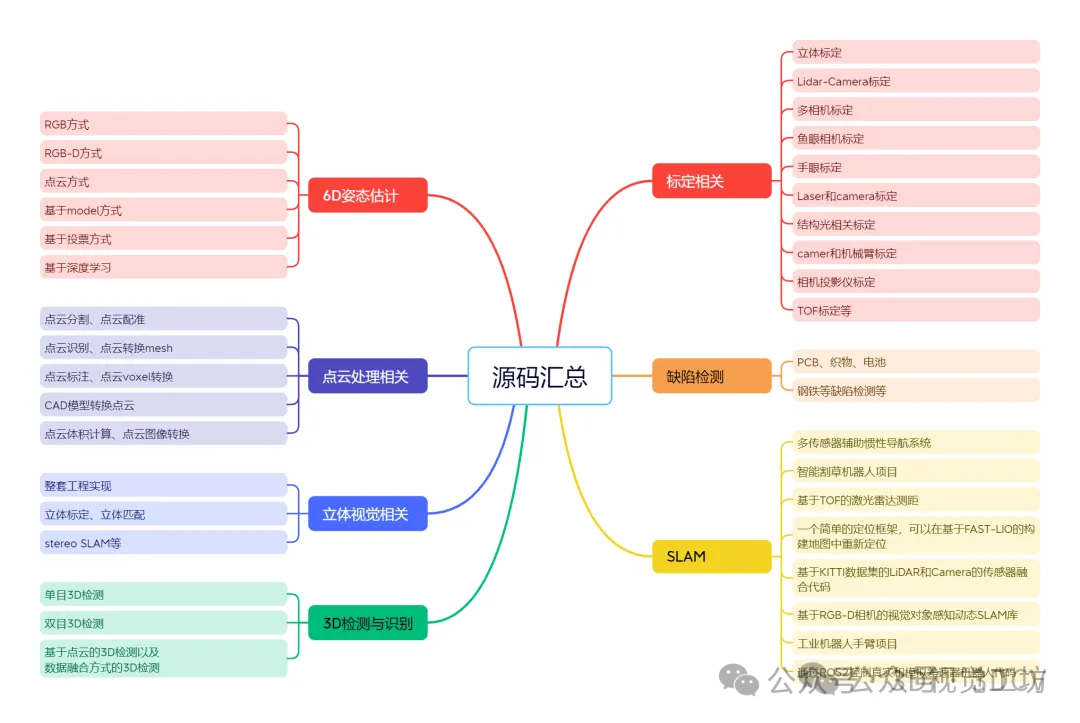
3D视觉源码汇总
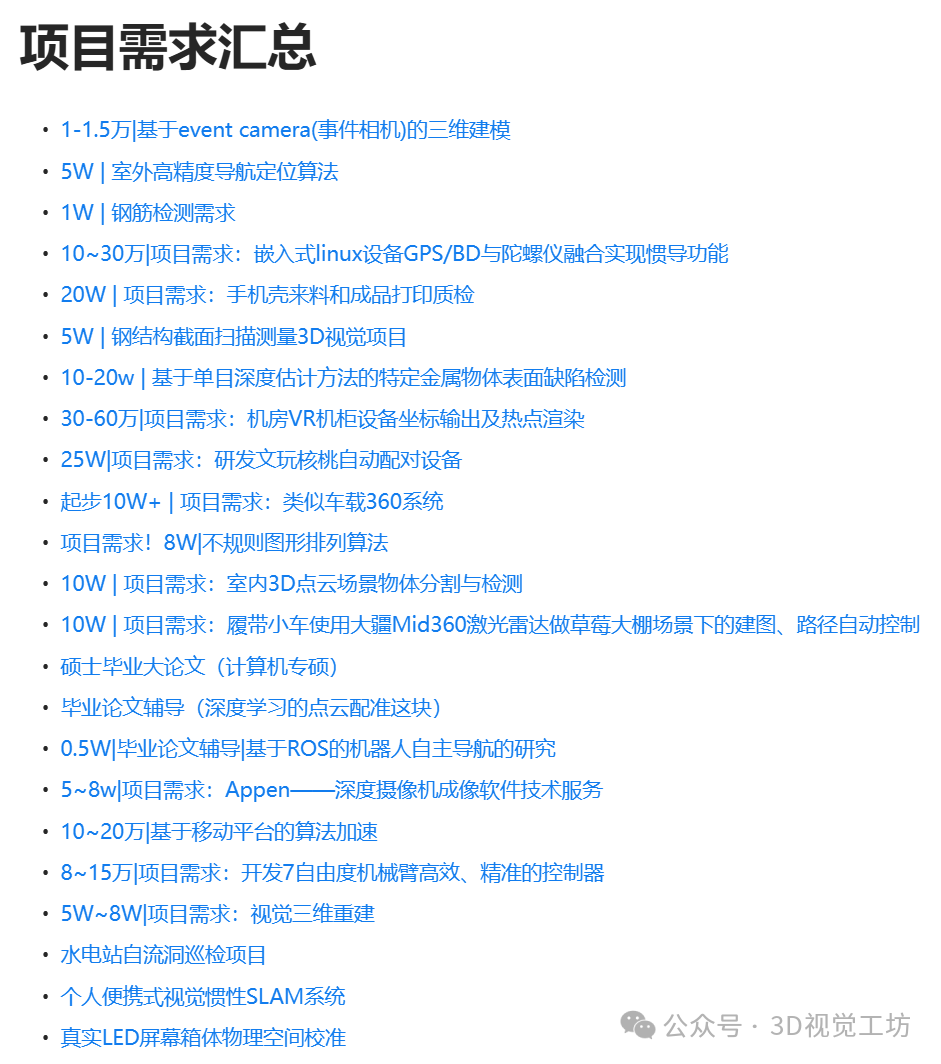
高质量项目发布与对接
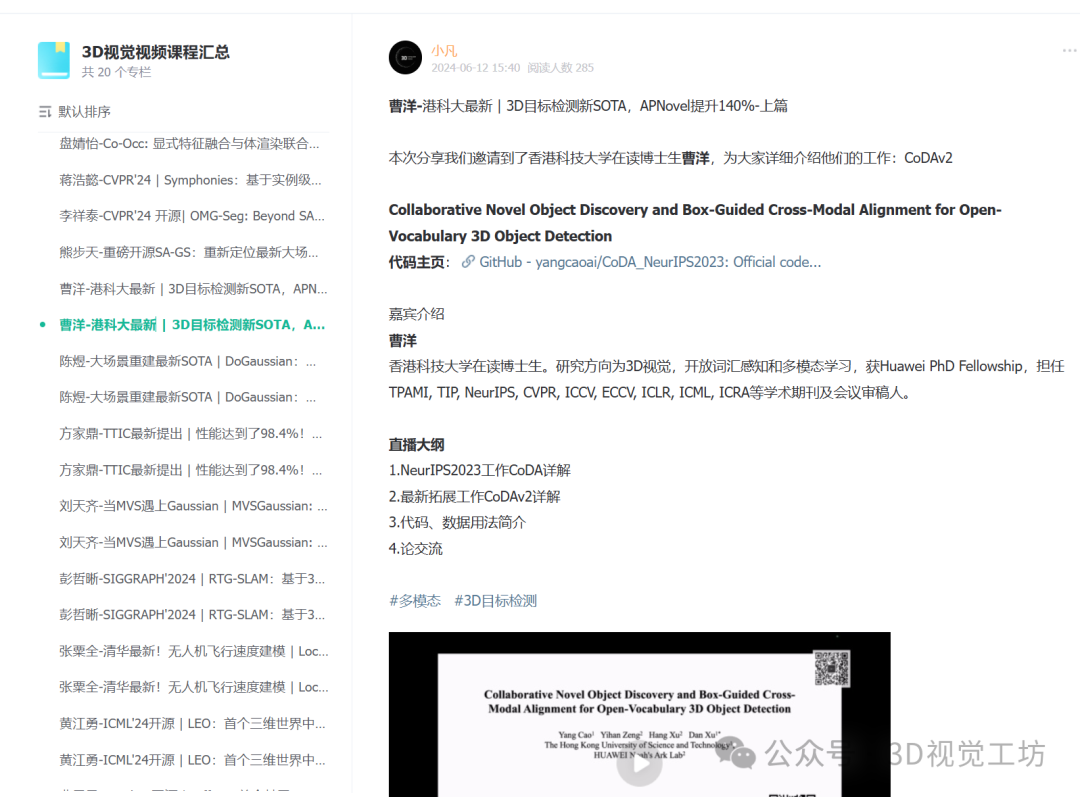
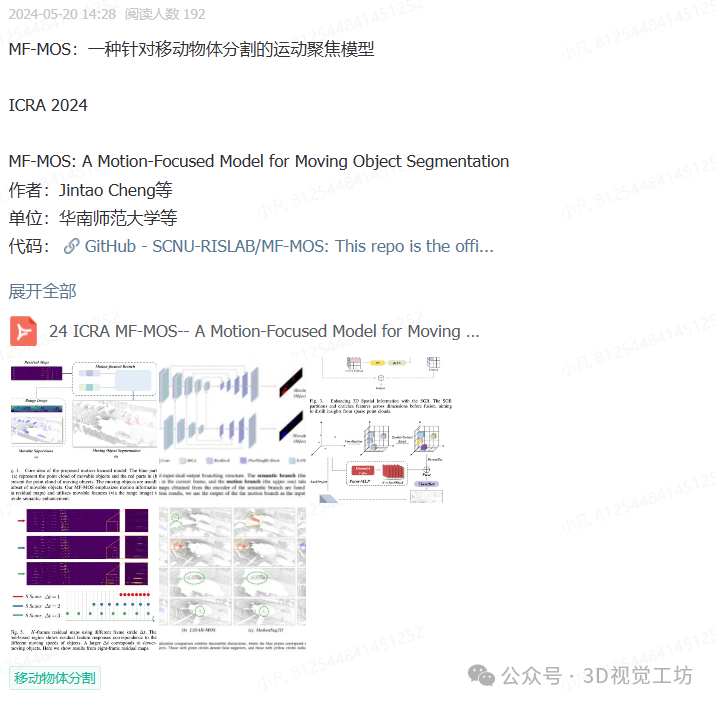
最前沿顶会论文直播讲解


包罗了3D视觉行业模组

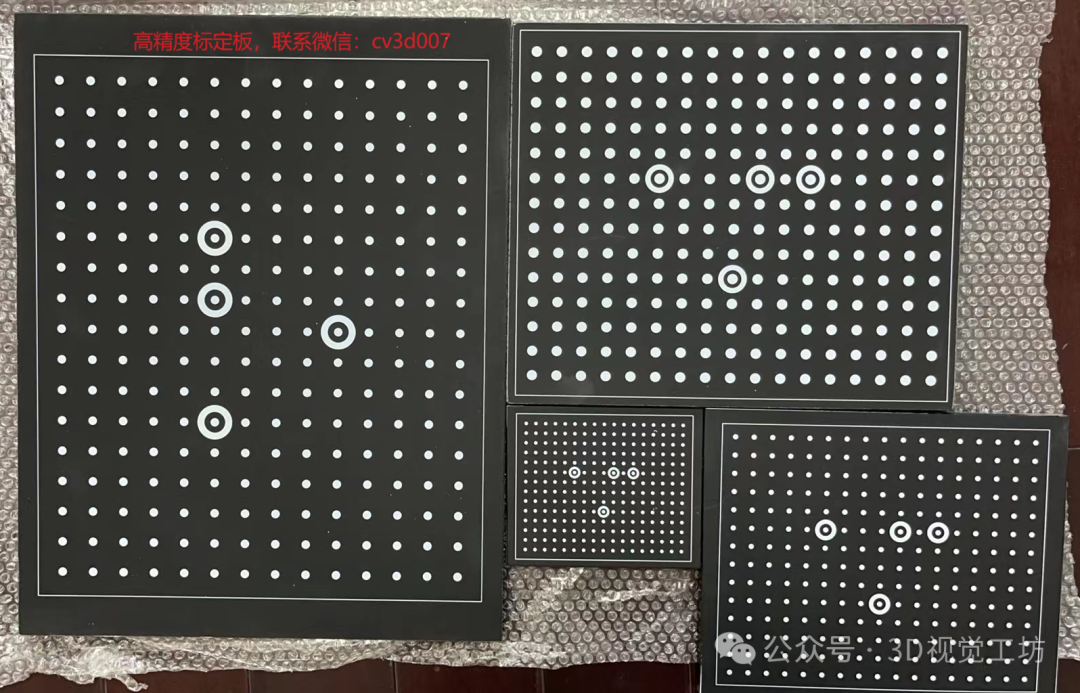




<<< 左右滑动见更多 >>>
最前沿论文速递

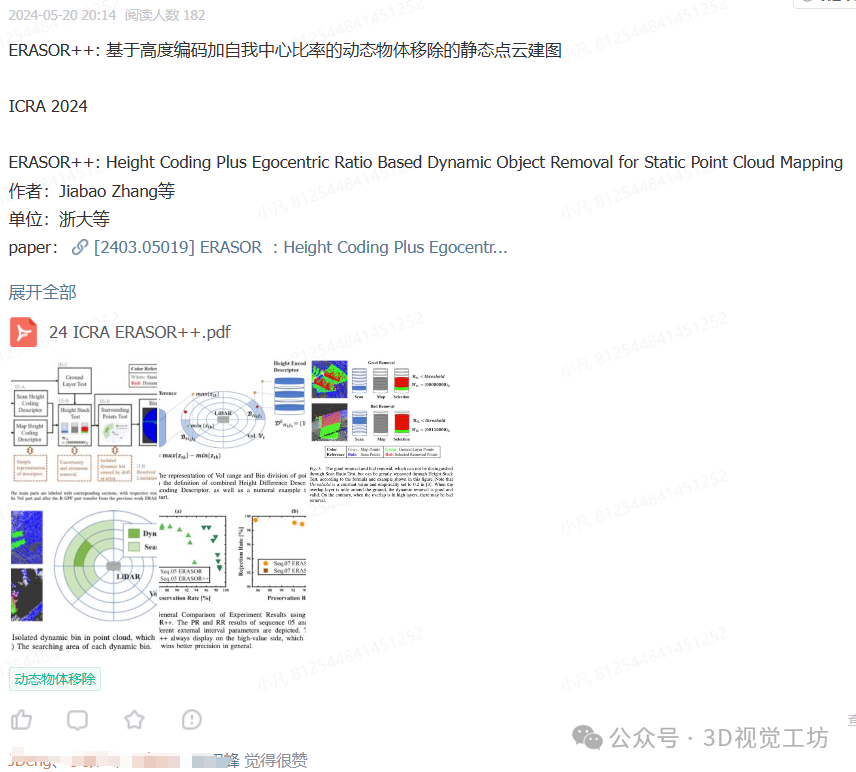
<<< 左右滑动见更多 >>>
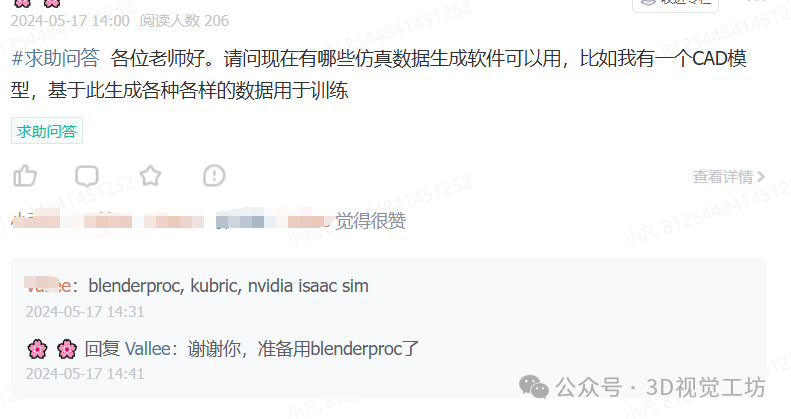
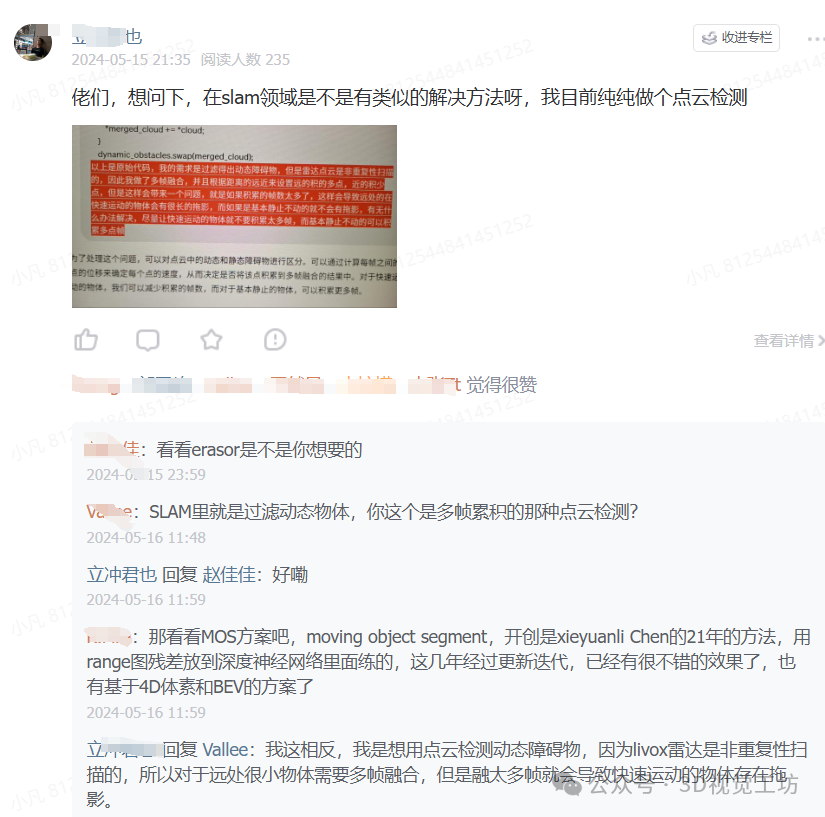
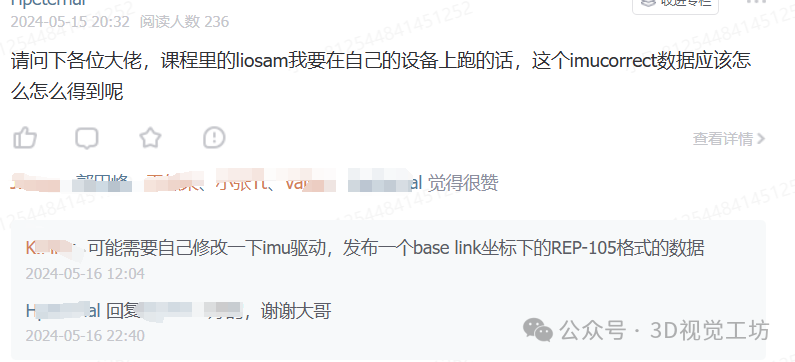
专业的智囊团为星球成员答疑解惑

<<< 左右滑动见更多 >>>
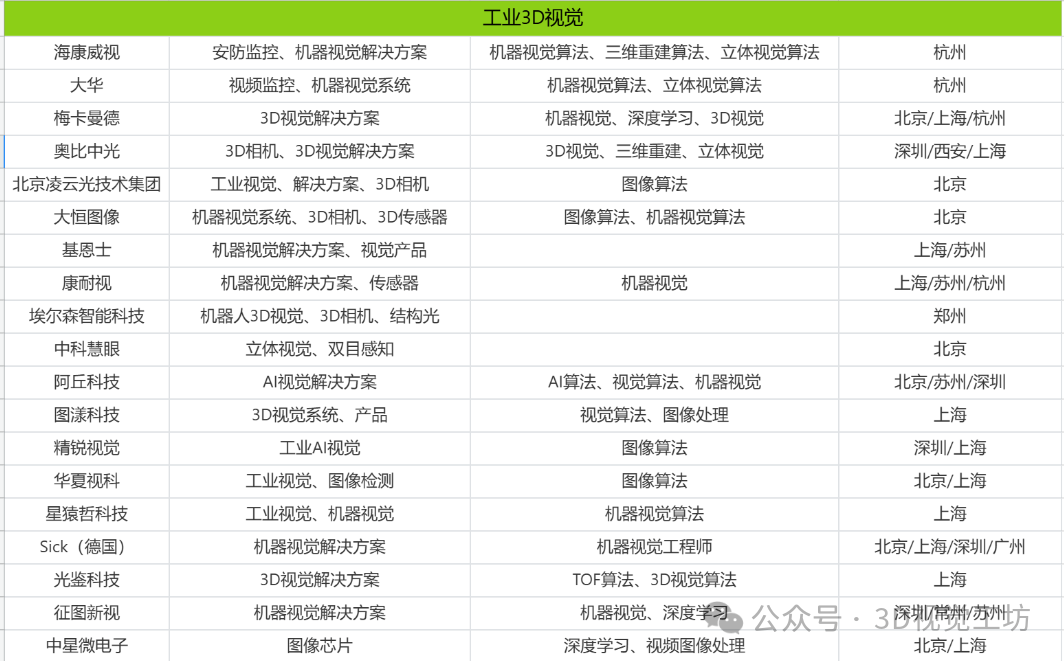
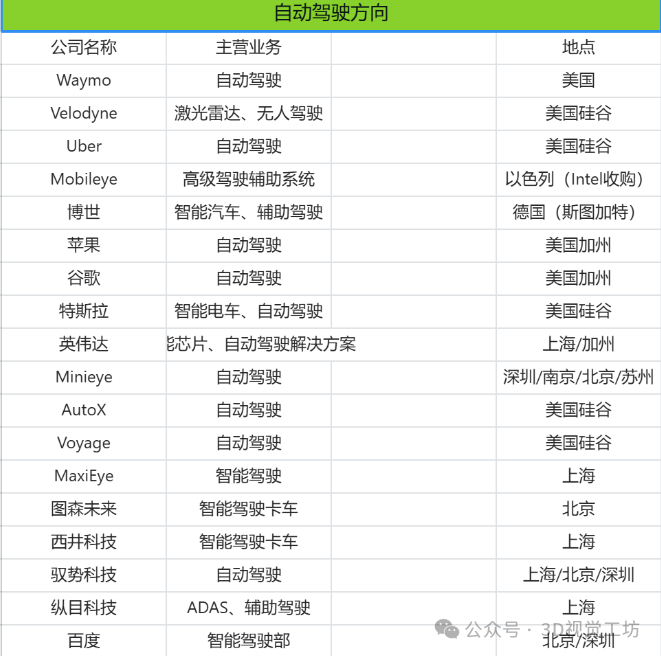
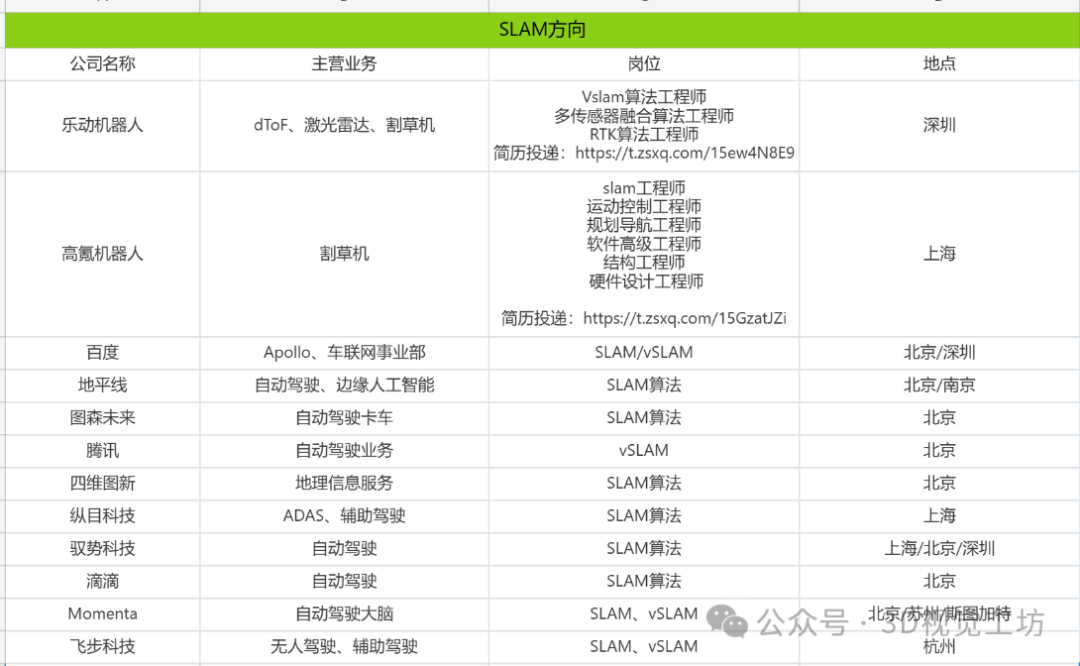
海量的行业招聘信息&面经
< ,
, ,
, >
>
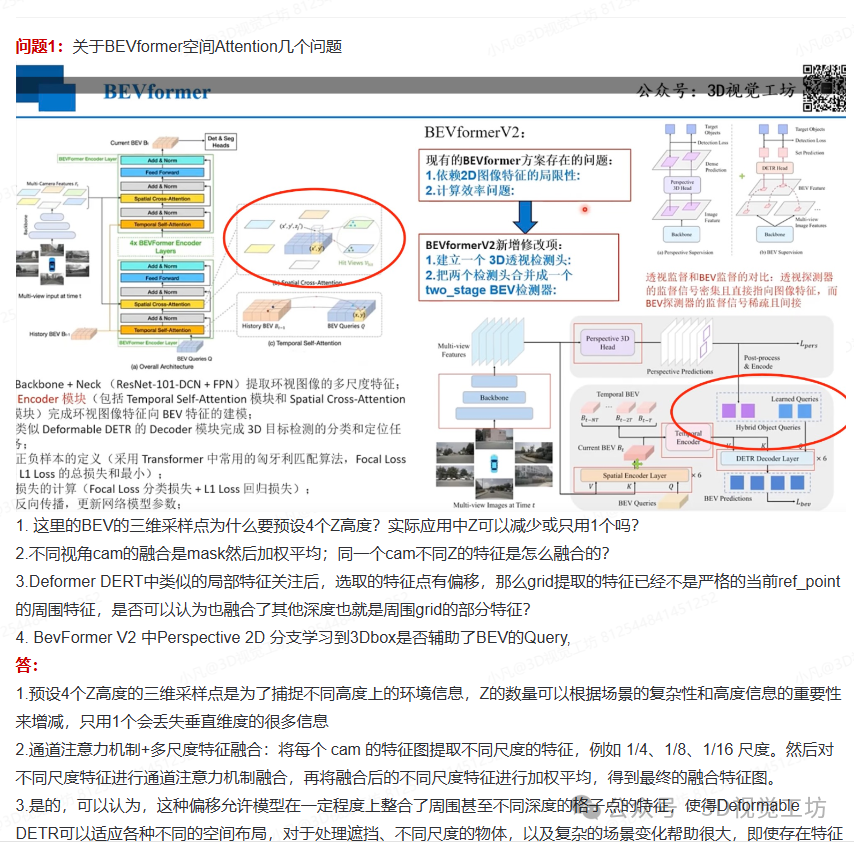
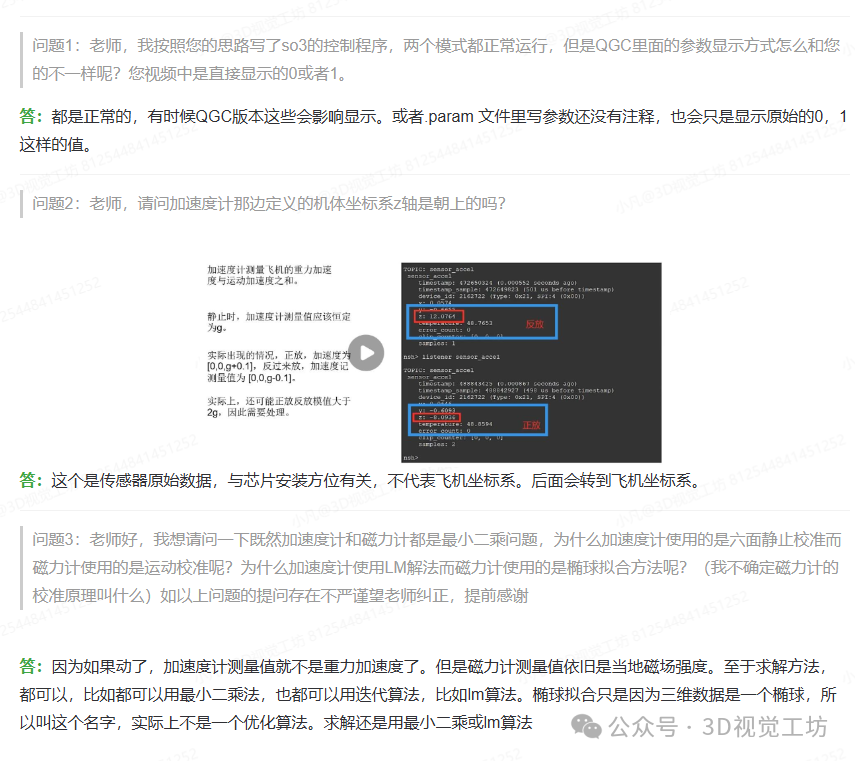
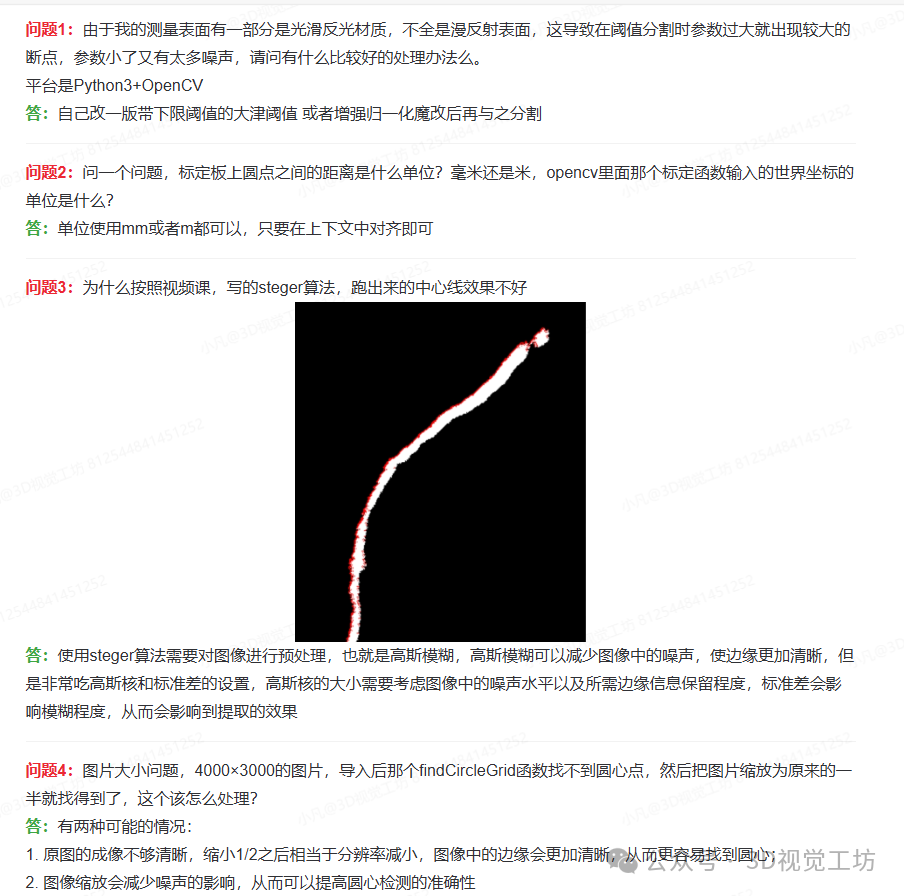
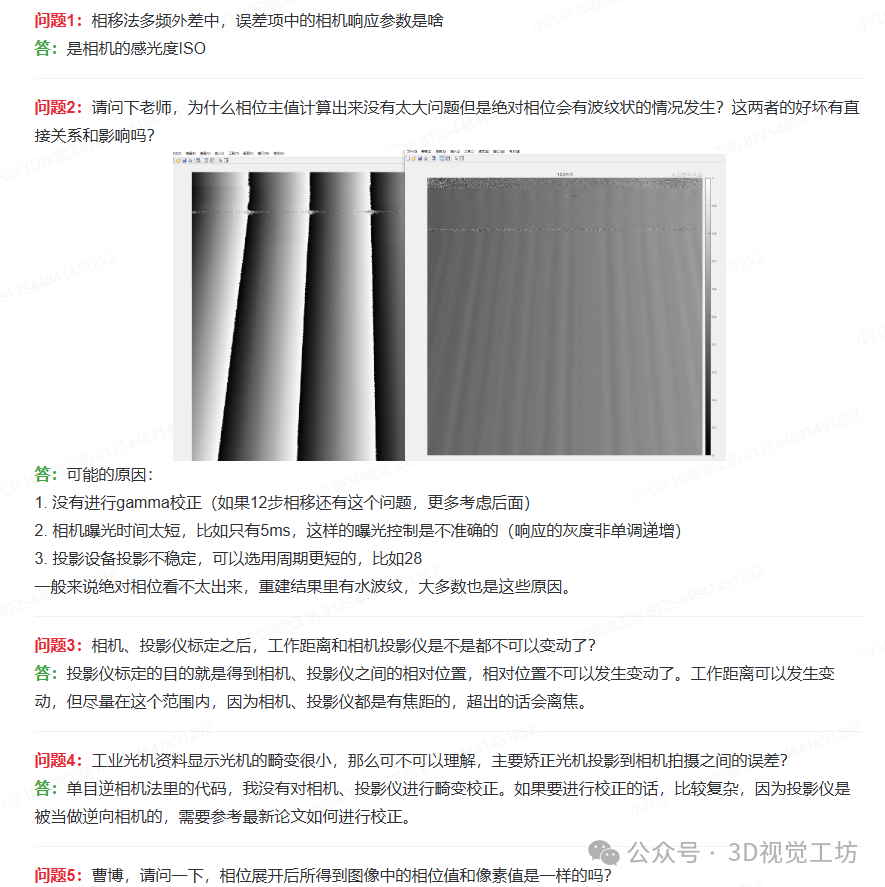
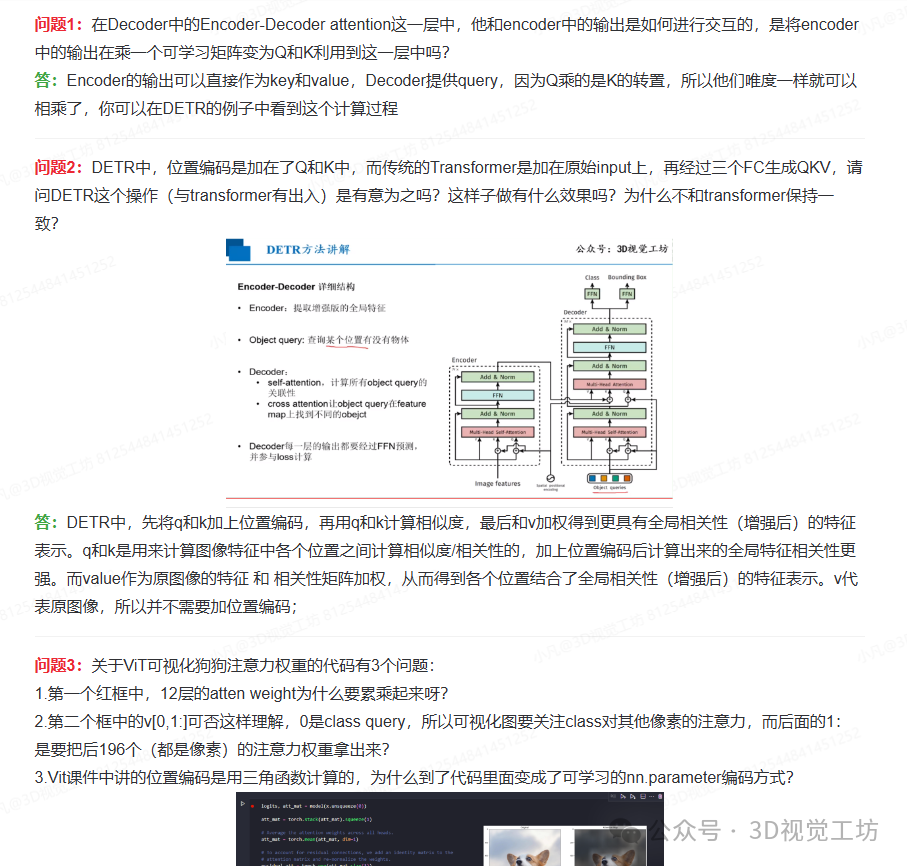
精华问题500问
BEV&Occ
无人机
相位偏折术

三维重建
线结构光
面结构光
机器人路径规划
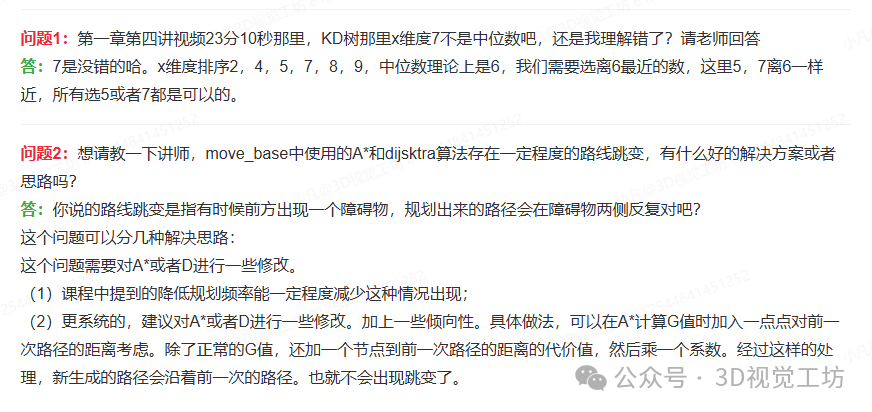
Tranformer



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









