






感谢大家一路以来的支持与陪伴,双十二即将来临,这里给大家赠送一张大额优惠券,感兴趣的小伙伴可以限时领取。

经常有粉丝后台问这样一个问题:
「3D视觉从入门到精通」知识星球,里面有什么内容?加入星球,是不是可以学习*课程呢?星球里会发布顶会论文等最新动态吗?
今天,咱们一起聊一聊这个沉淀了6年的3D视觉技术圈子。
一 什么是知识星球?
知识星球是一个高度活跃的社区平台,在这里你可以和相同研究方向的小伙伴一起探讨科研工作难题、交流最新领域进展、分享3D视觉最新顶会论文&代码资料、分享视频(讲解3D视觉重要知识点)、发布高质量的求职就业信息,承接项目等,当然还可以侃侃而谈,吐槽学习工作生活。
二 「3D视觉从入门到精通」知识星球
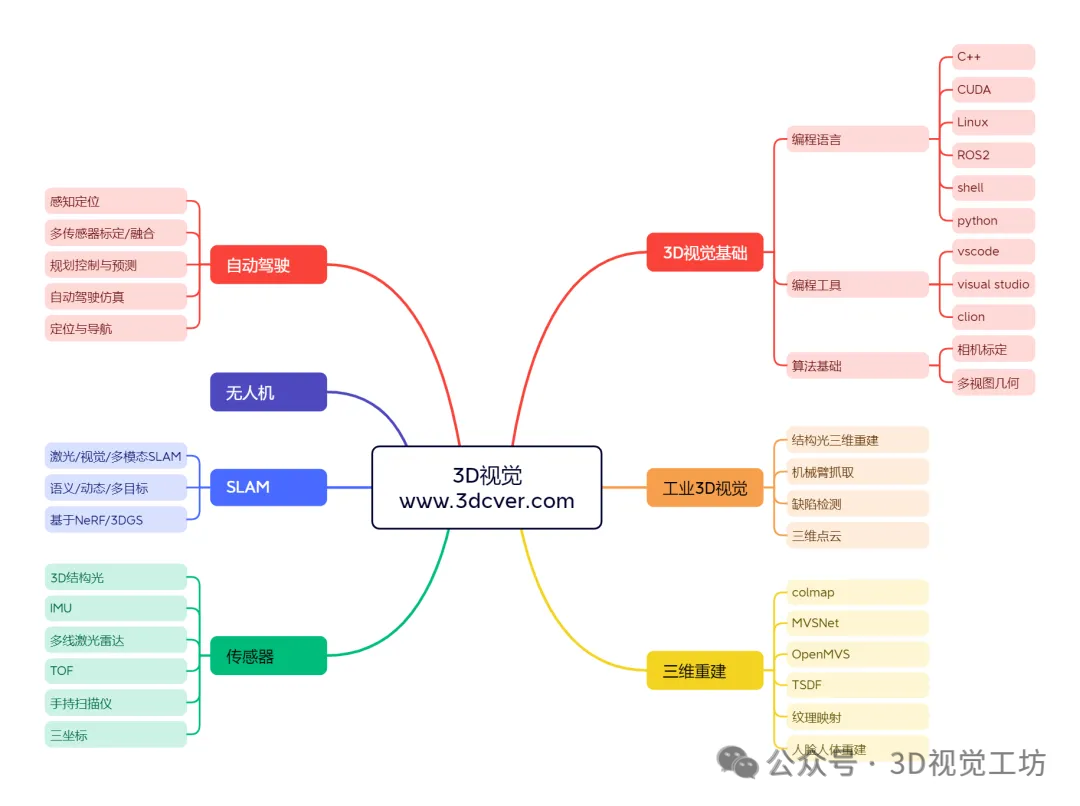
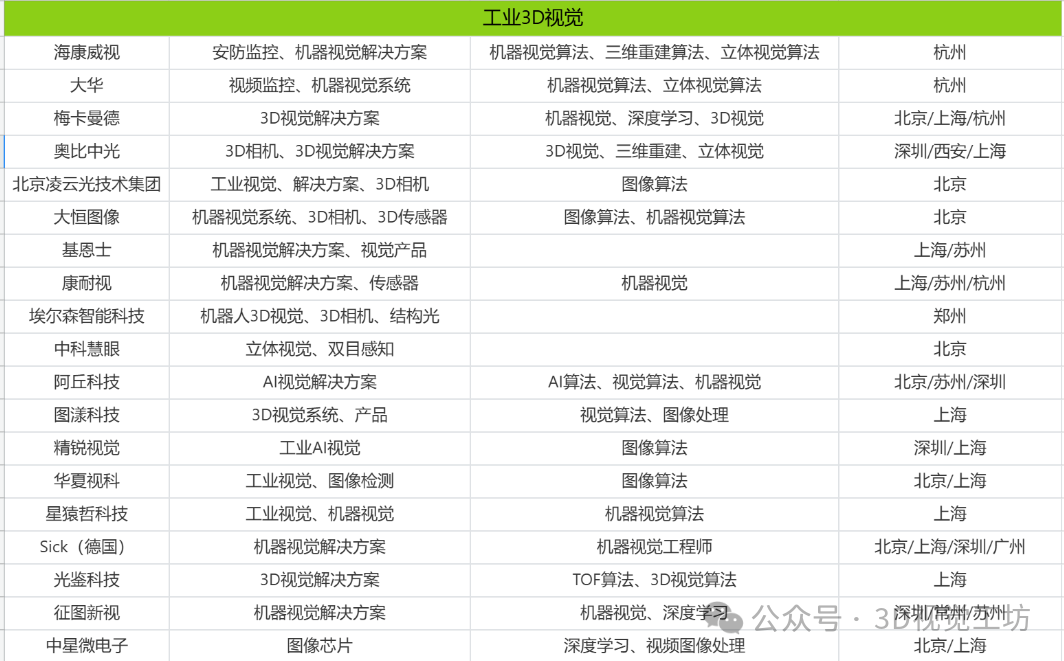
目前已有近5800多名活跃成员,主要涉及这五大方向:工业3D视觉、SLAM、自动驾驶、三维重建、无人机、具身智能、大模型方向。
细分方向众多,包括:具身智能、大模型、扩散模型、相机标定、结构光、3DGS等三维重建、三维点云、缺陷检测、机械臂抓取、激光/视觉/多模态SLAM、自动驾驶、深度估计、模型部署、Transformer、3D目标检测、深度学习、视觉竞赛、硬件选型、视觉产品落地经验分享、学术&求职交流等。我们也会紧跟前沿科技发展,对于Mamba、具身智能、大模型等,在我们星球里也是热门讨论话题。
| 特点 | 特点 | 特点 |
|---|---|---|
| 国内成立最早 | 近20门独家视频 | 3D视觉精华问答 |
| 最新顶会论文与代码分享 | 顶会作者直播 | 专业智囊团队答疑解惑 |
| 最新前沿技术研讨会,比如3DGS | 高质量项目对接 | 各个模块的源码梳理 |
| 最新行业招聘信息 | 求职面经 | 科研生活吐槽 |
| 行业最新模组分享 | 随时提问交流 | 每月积分榜奖励 |

三 星球内独家秘制课程



基础课程
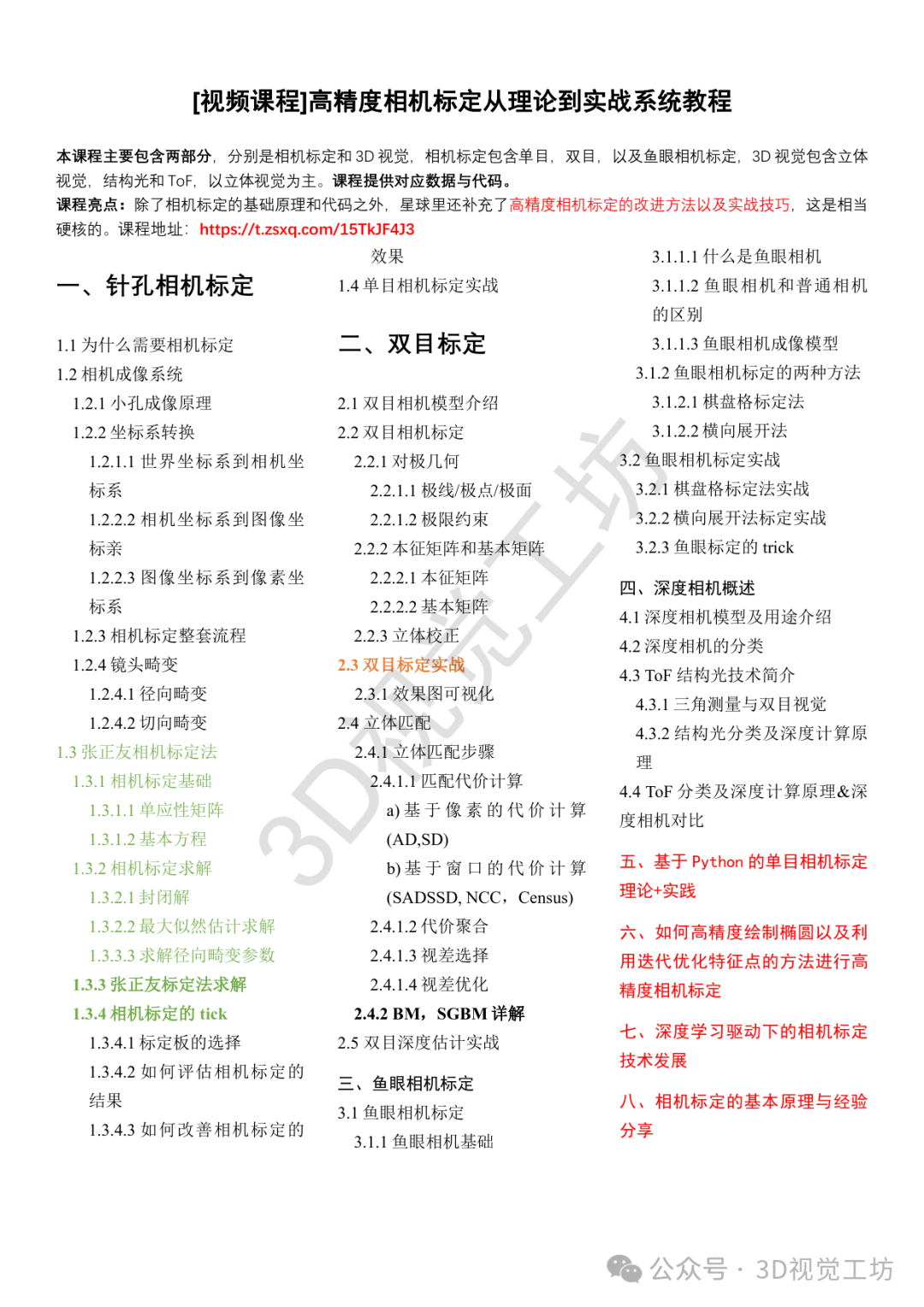
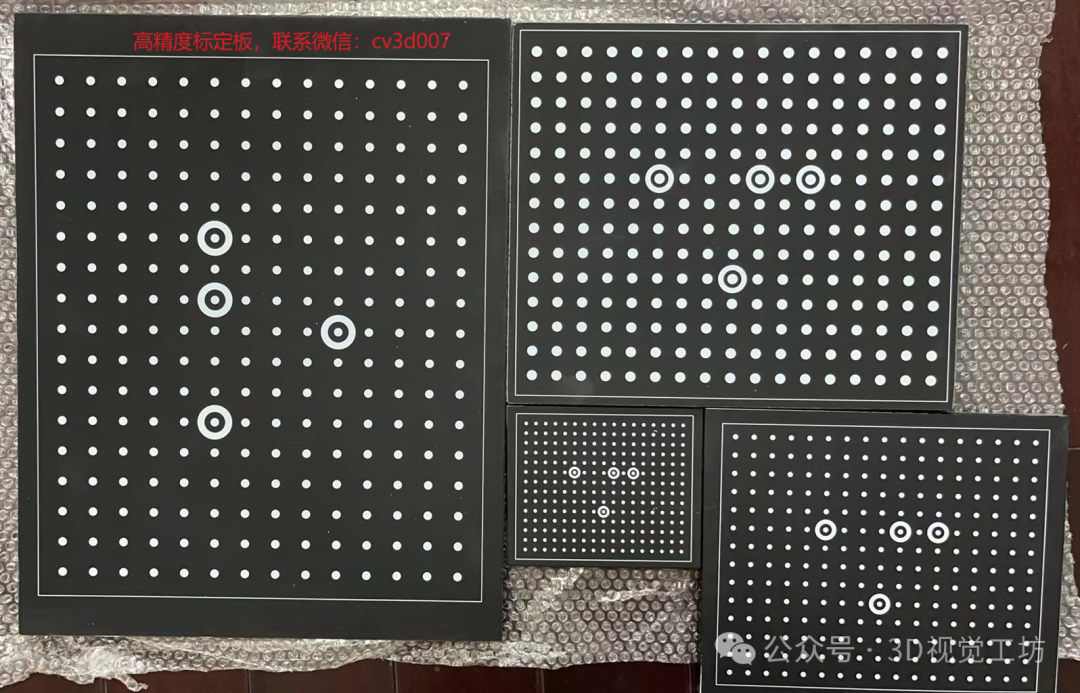
3.1 高精度相机标定从理论到实战系统教程
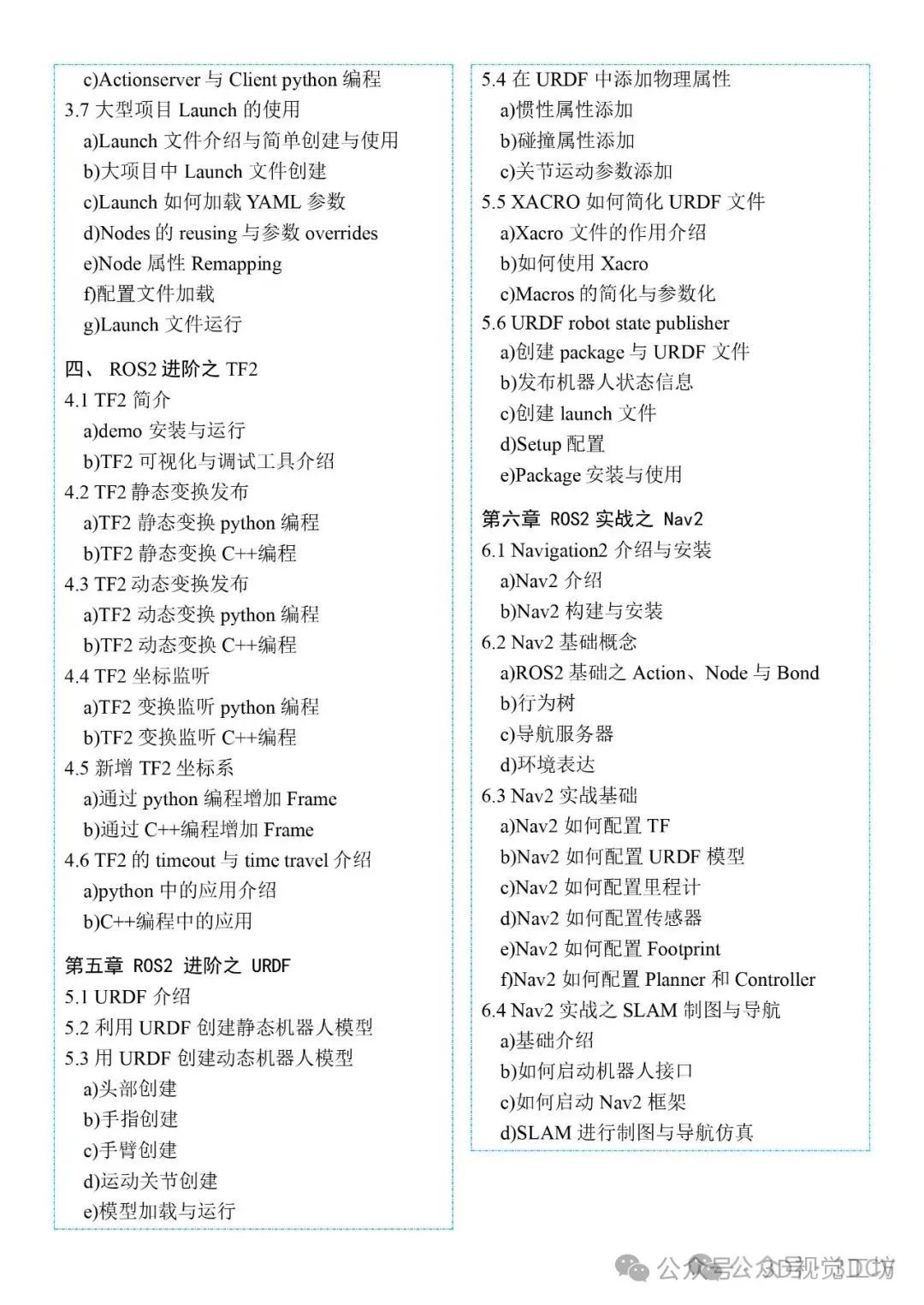
3.2 ROS2从入门到实战视频教程
ROS2从入门到实战视频教程,从小白方式介绍到高阶使用讲解,对ROS2进行全面的实操教学训练,为大家提供系统性的学习机会。

3.3 四旋翼飞行器:算法与实战

工业3D视觉系列视频课程
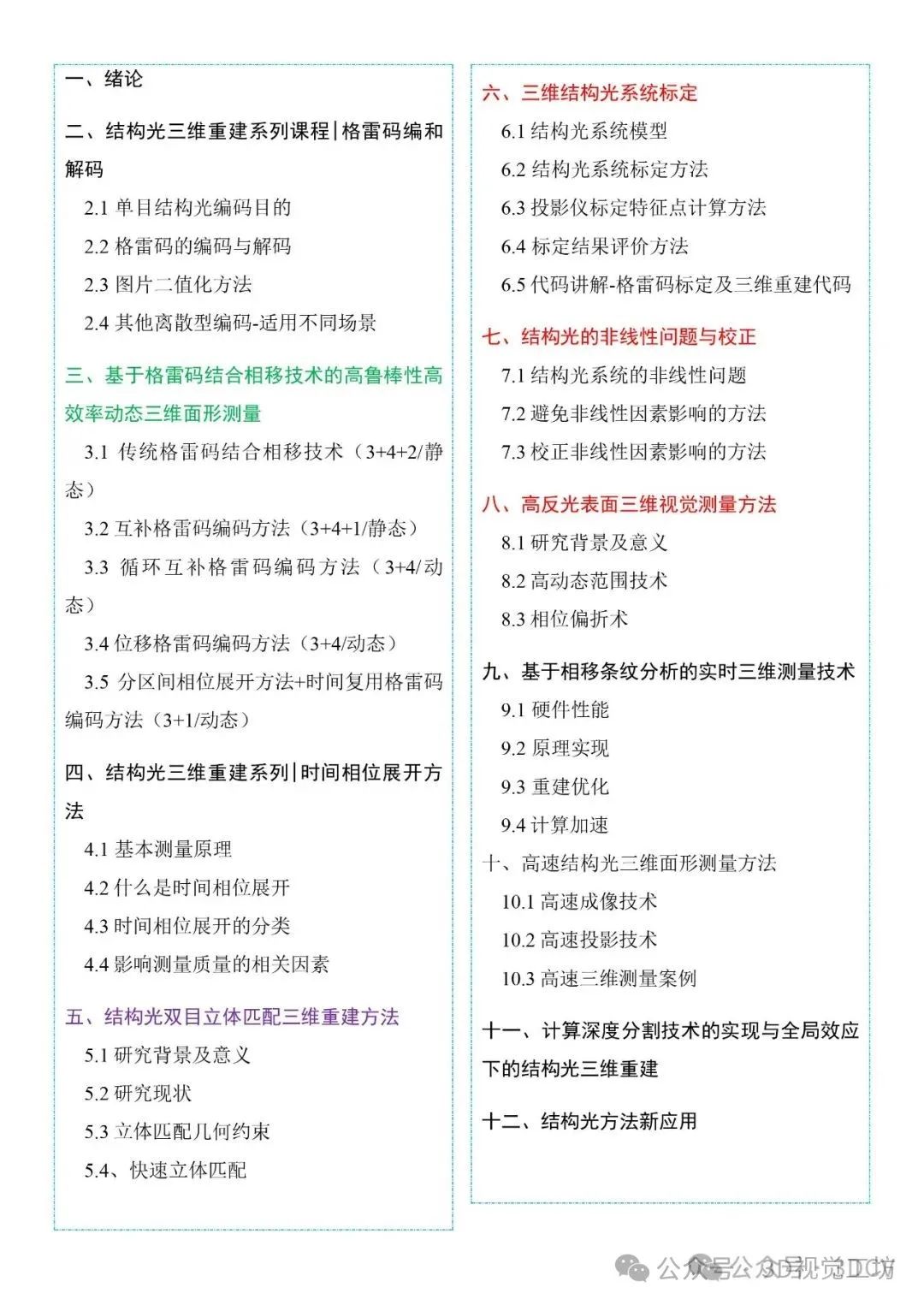
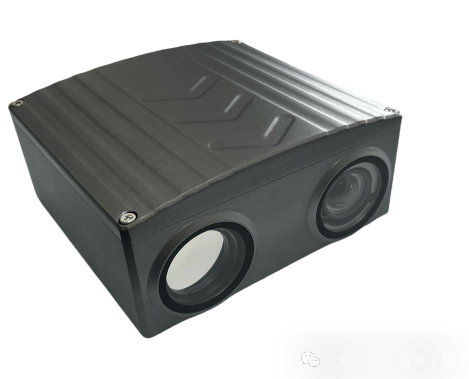
3.4 基于面结构光三维重建系列视频
主讲老师团队包括:吴周杰博士、邓博、书涵、张琼仪、杨洋博士、郭文博博士等。

3.5 机械臂抓取、三维点云、三维重建等
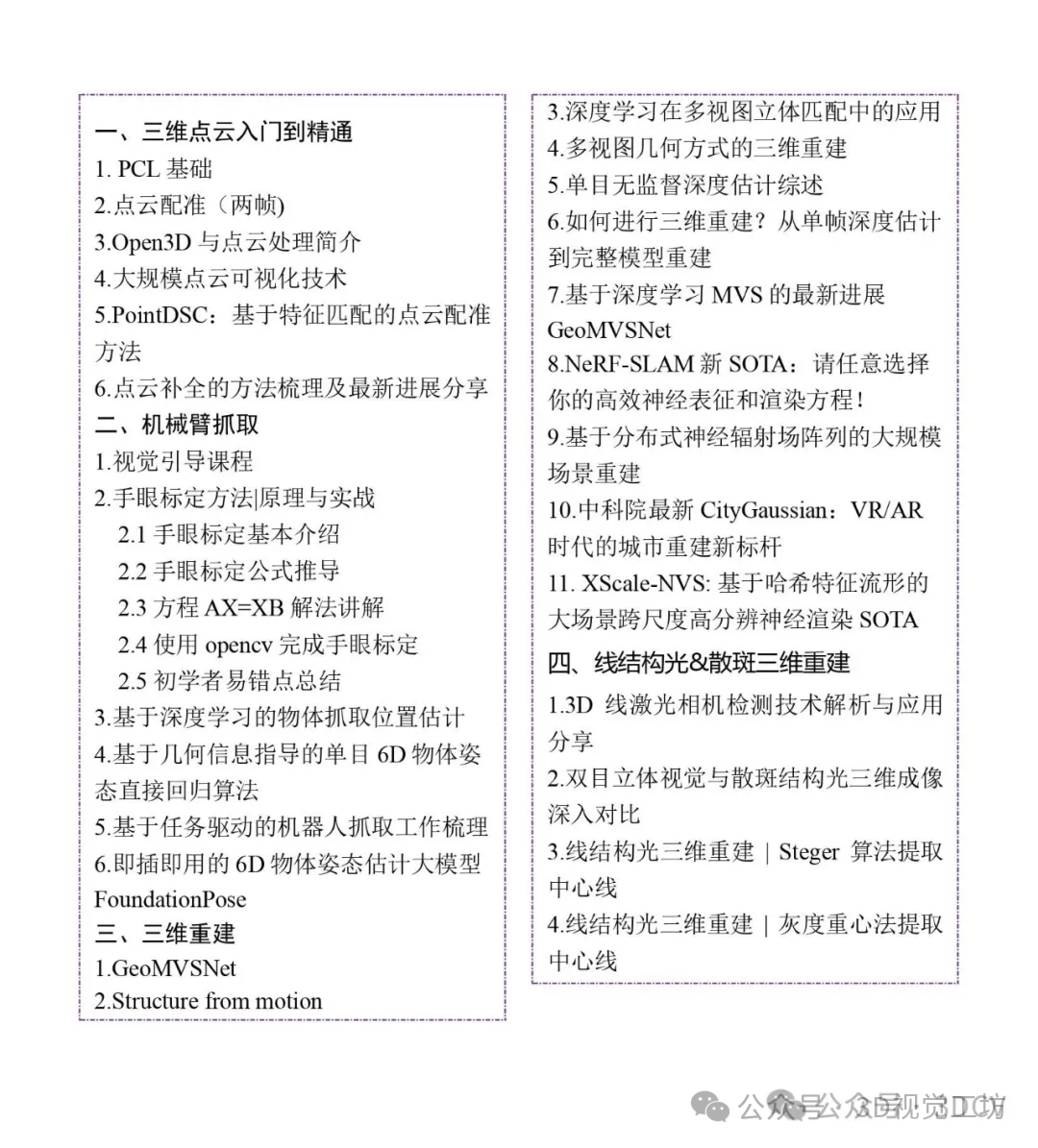
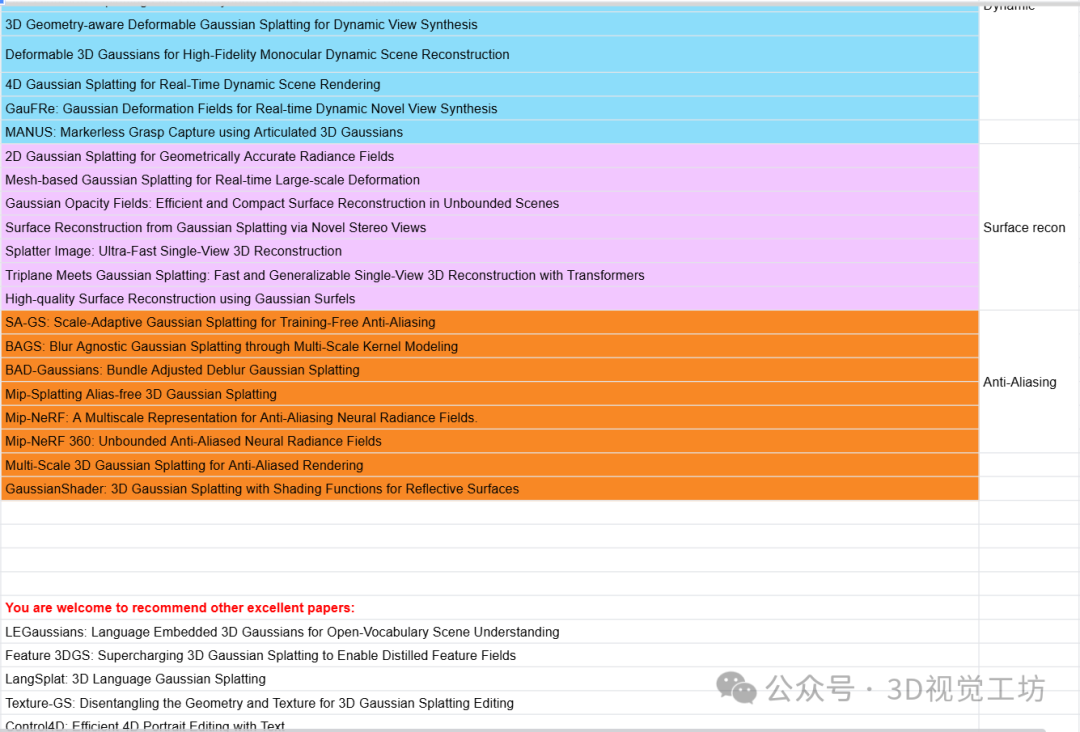
3.6 3DGS三维重建直播研讨会

SLAM系列视频
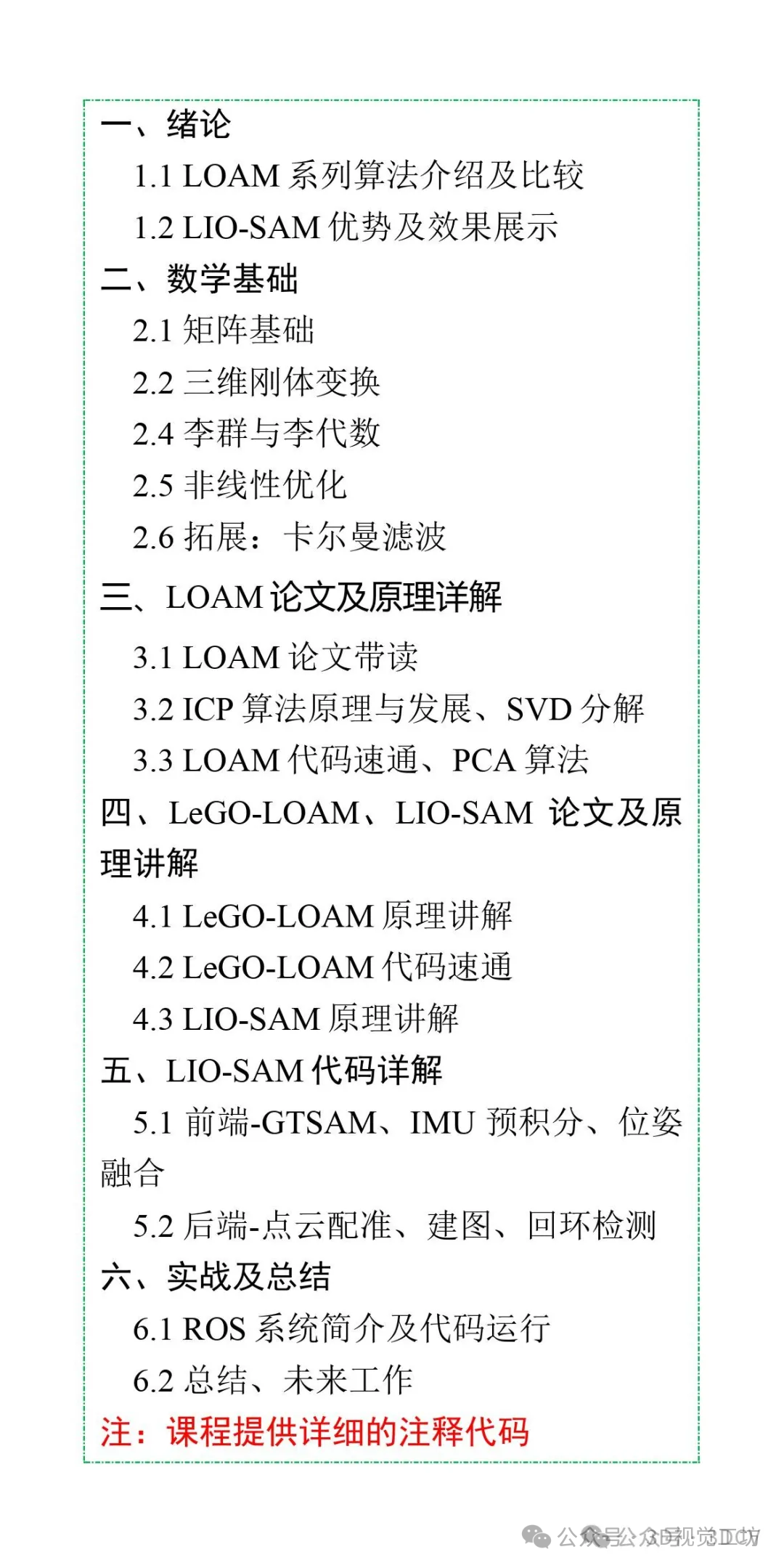
3.7 如何轻松拿捏LIO-SAM?(提供注释版本代码)
3.8 彻底剖析激光-视觉-IMU-GPS融合SLAM算法:理论推导、代码讲解和实战系列视频
多模态融合 SLAM 的门槛较高,在需要视觉 SLAM 与激光 SLAM 的基础之外,还会遇到不同模态测量的融合,不同传感器的时间同步,多传感器的外参标定,多传感器异常检测等问题,使得各位同学做这块的时候遇到诸多障碍。因此我们联合机器人学国家重点实验室的博士大佬推出这门课程,从理论和代码实现两个方面对激光雷达-视觉IMU-GPS 融合的 SLAM 算法框架和技术难点进行讲解,并且博士大佬会根据自己多年的机器人工程经验,向大家讲解在实际机器人应用中多模态融合的方法和技巧。

3.9 ORB-SLAM3理论基础+关键技术详解

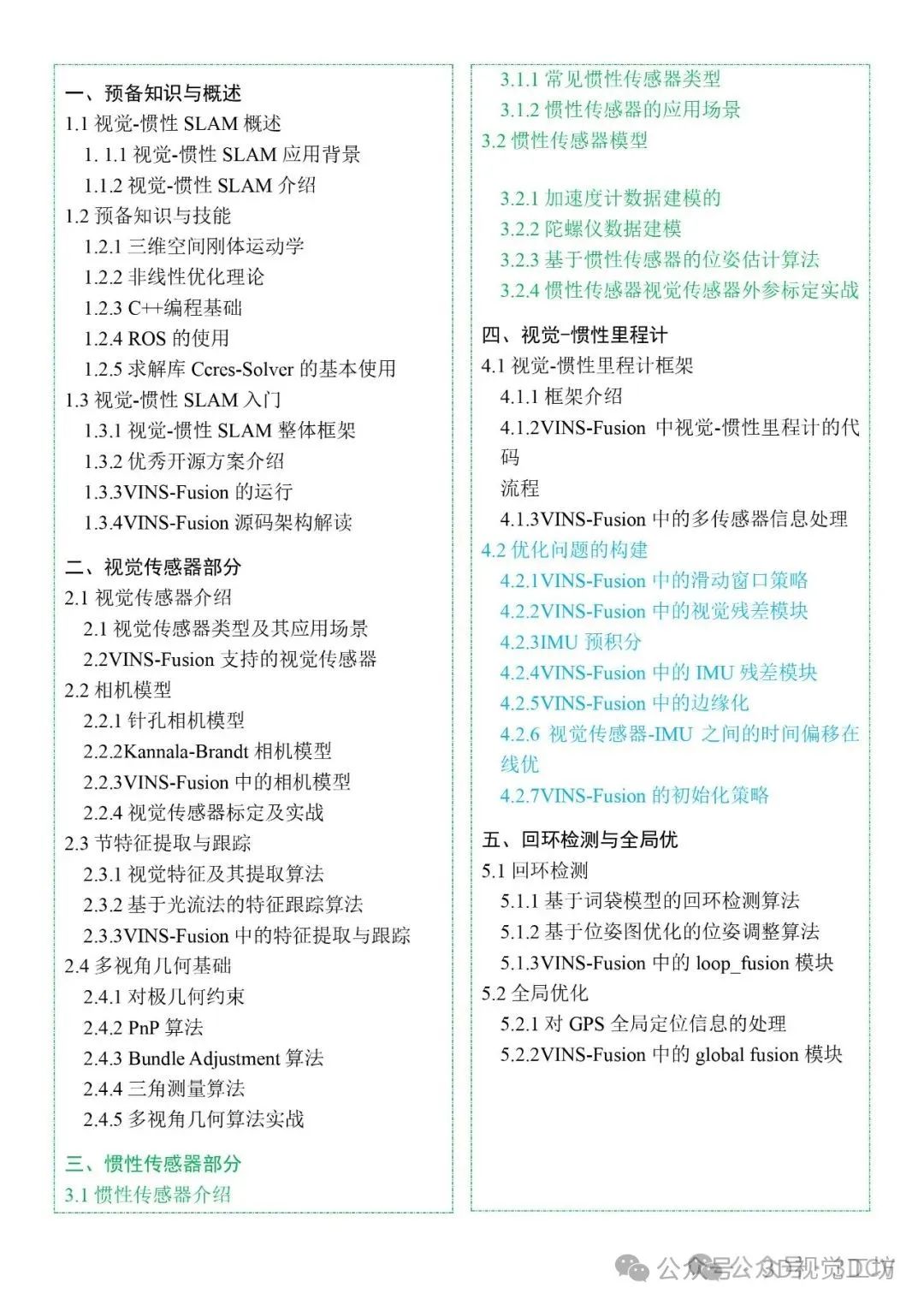
3.8 视觉-惯性SLAM:VINS-Fusion原理精讲
视觉-惯性SLAM所涉及的理论深度较深、覆盖面广,并对工程实践能力要求也较高,新手自学时相对比较困难。当下虽然有很多丰富的理论资料和优秀的相关开源项目,但是许多童鞋面对海量的理论资料、复杂的开源项目时可能无从下手,前期学习曲线过于陡峭,不得不放弃继续深入。为此,我们推出了《视觉-惯性SLAM的入门与实践》课程,结合VINS-Fusion 源码,系统地对视觉-惯性 SLAM 的基础理论知识进行梳理。整套课程由一线算法工程师教授,从基础理论到代码剖析,保姆级教学,助力学员一步步从小白成长为大牛。
自动驾驶
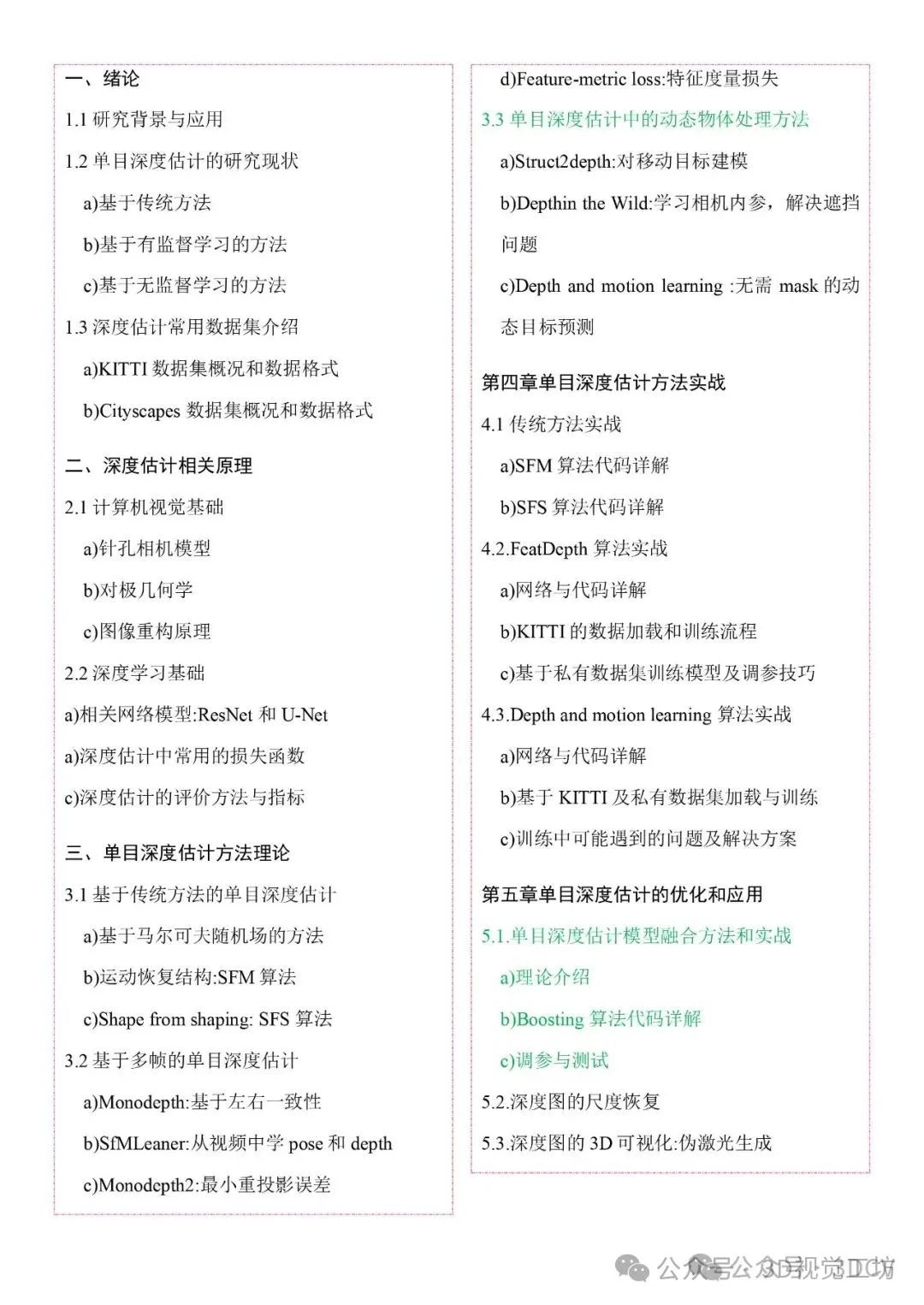
3.9 单目深度估计方法:理论与实战视频
视频教程主要分为两大部分:理论篇和实战篇,由于有监督方法的深度真值获取困难,且无监督方法的效果与有监督方法几乎相当,我们将课程的重心放在了无监督方法上。
其中,理论篇主要包括:深度估计相关的损失函数、评价指标等基础理论,传统深度估计方法、无监督深度估计方法等理论知识。实战部分包括:传统深度估计方法和深度学习方法,偏向于无监督深度估计以及相关应用等等。
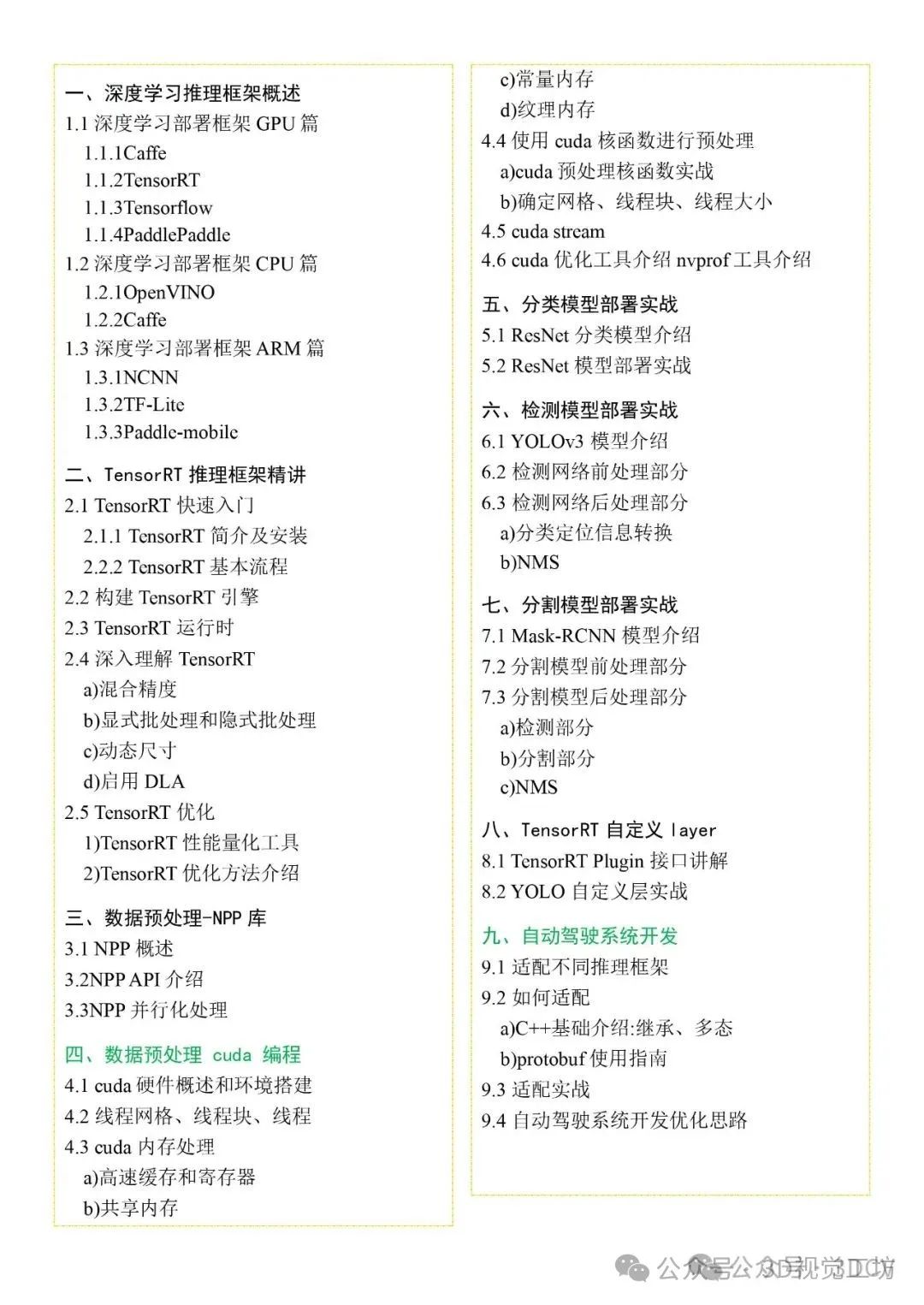
3.10 自动驾驶中的深度学习模型部署实战视频
本视频教程将采用理论和实践相结合的思路,首先对TensorRT的编程模型以及GPU/cuda的相关知识进行讲解,带领大家达到知其所以然的程度;之后课程将用分类、检测、分割三个例子来展示详细编程流程,并给出相关代码,达到真正能落地的工业级分享。
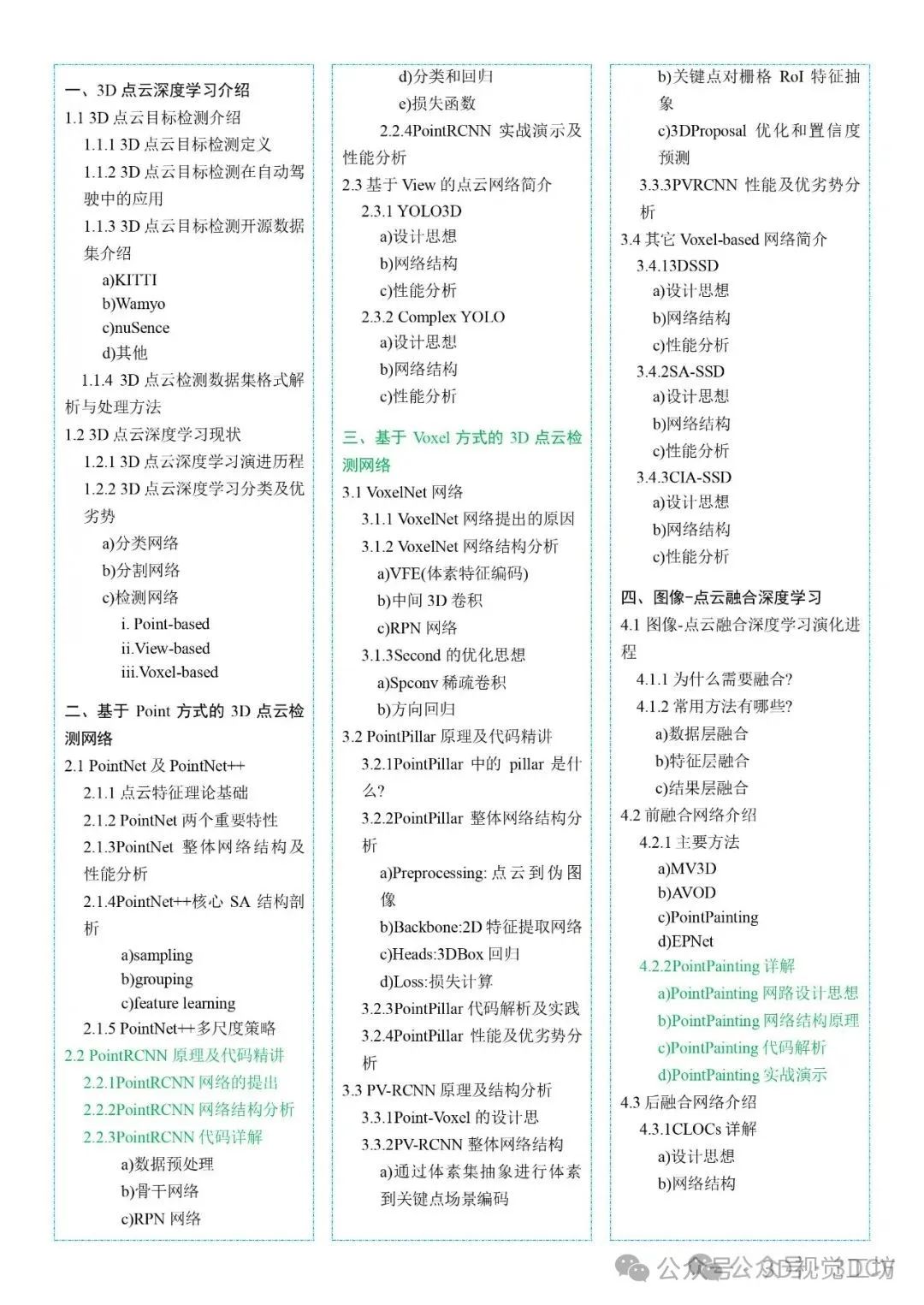
3.11 面向自动驾驶领域的3D点云深度学习目标检测系列视频
本视频教程以3D点云深度学习为主,对Point-based和Voxel-based系列的3D目标检测网络架构进行系统剖析和代码梳理,助力各位同学在点云深度学习更快的入门和更深的理解。
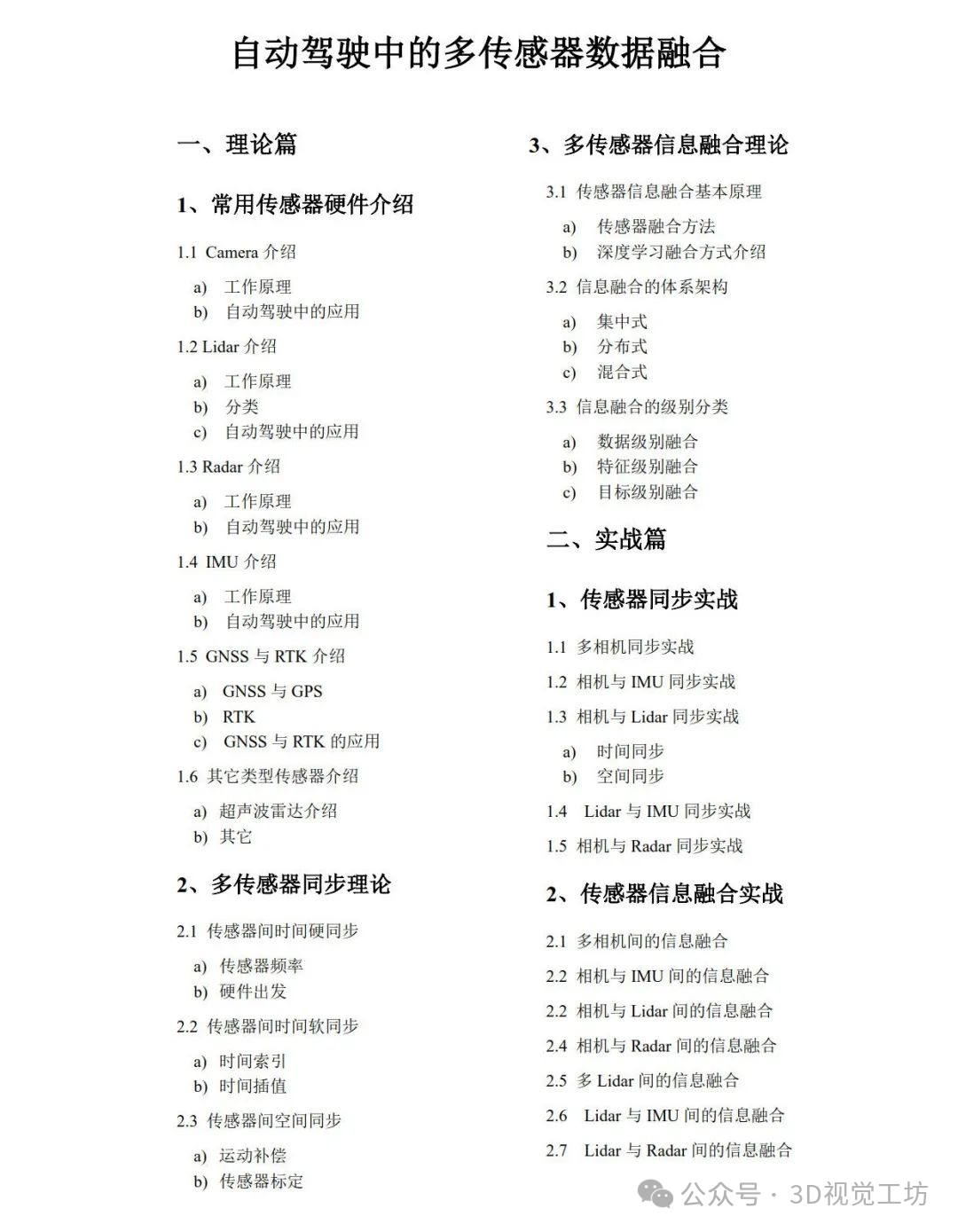
3.12 面向自动驾驶领域的多传感器融合系统学习课程
《自动驾驶中的多传感器数据融合》课程主要分两个大模块:理论篇和实战篇,理论篇部分主要介绍自动驾驶中常用的传感器硬件、传感器间的时间同步和空间同步以及多传感器间的信息融合理论知识;实战篇更多偏向工程应用,工程中传感器间同步与融合如何实现等,课程大纲如下:
 学习3D视觉核心技术,扫描查看介绍,3天内无条件退款
学习3D视觉核心技术,扫描查看介绍,3天内无条件退款

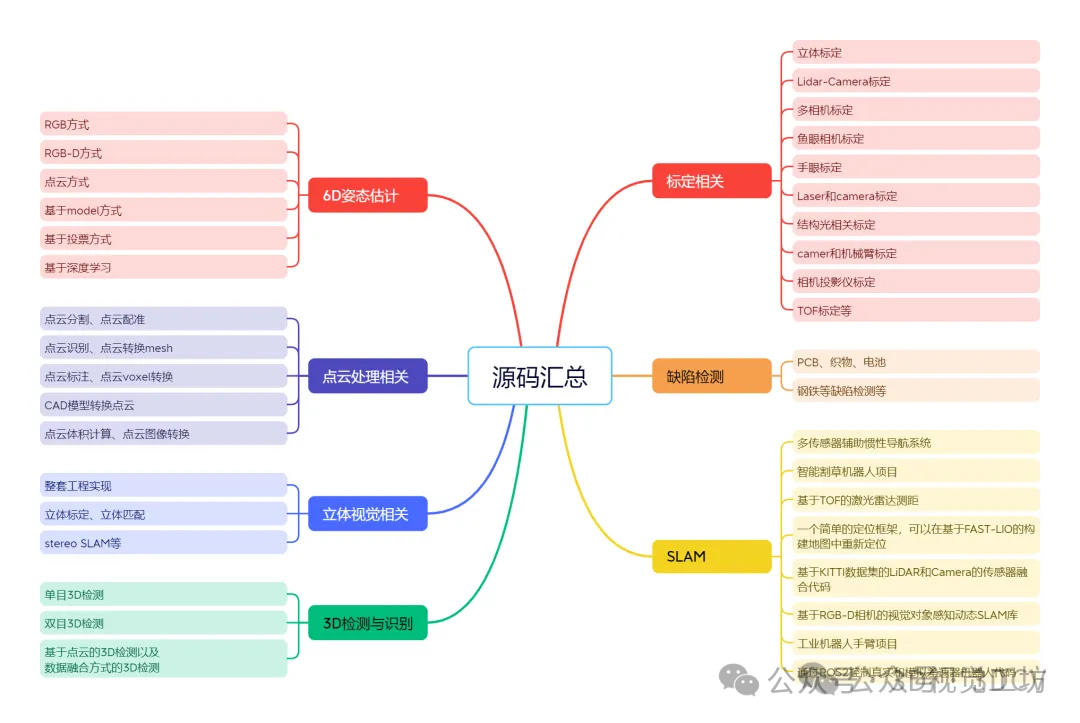
3D视觉源码汇总
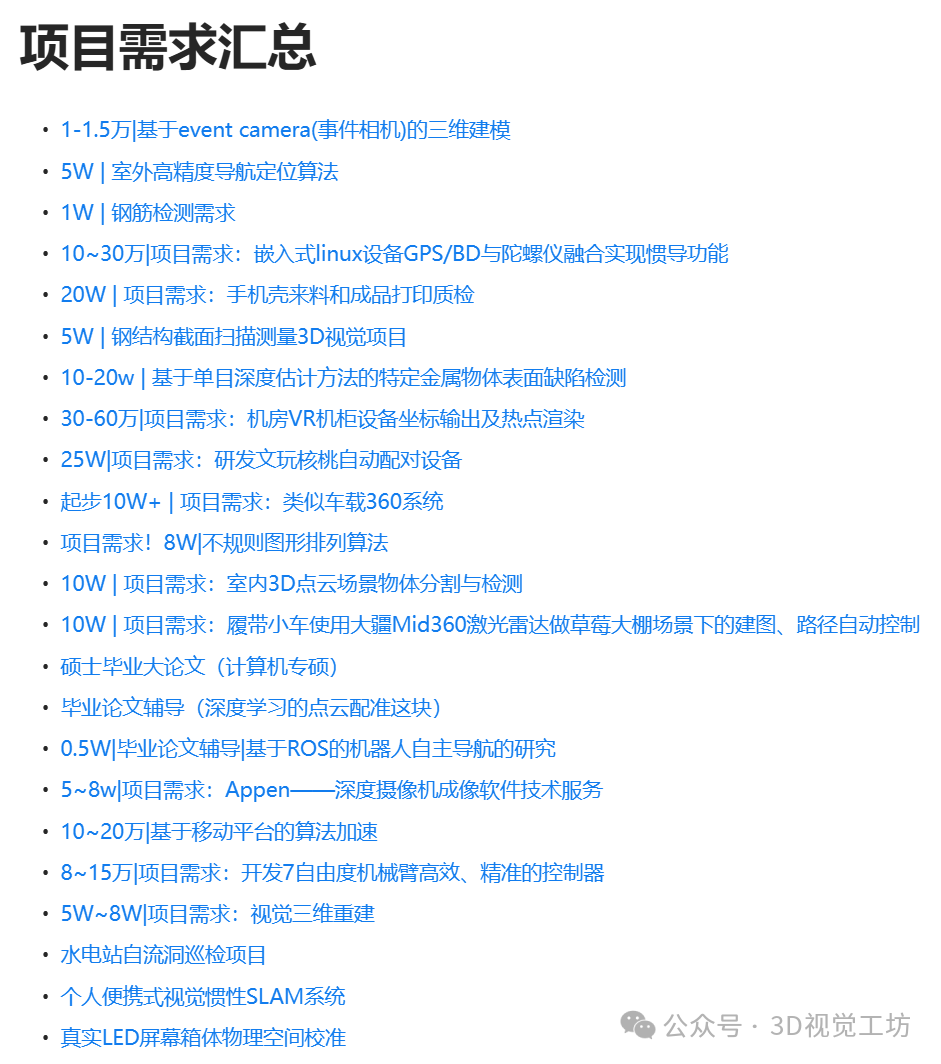
高质量项目发布与对接
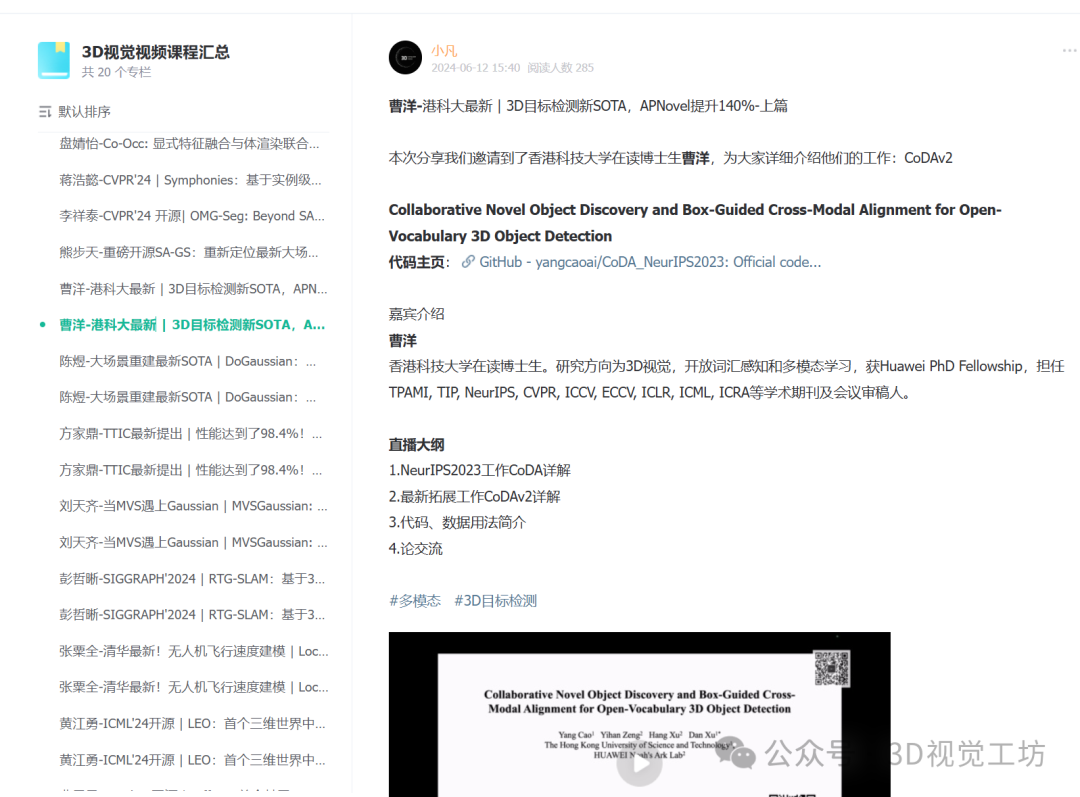
最前沿顶会论文直播讲解


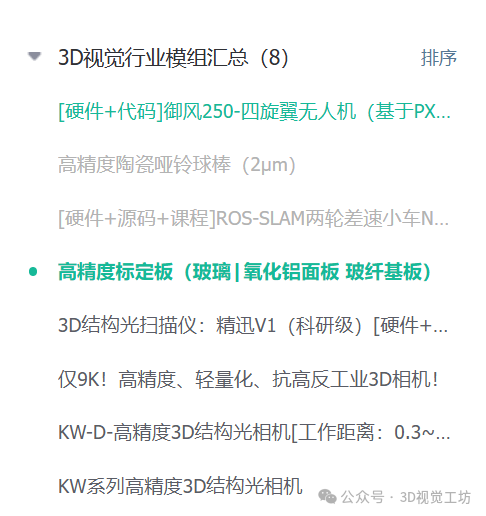
包罗了3D视觉行业模组





<<< 左右滑动见更多 >>>
最前沿论文速递

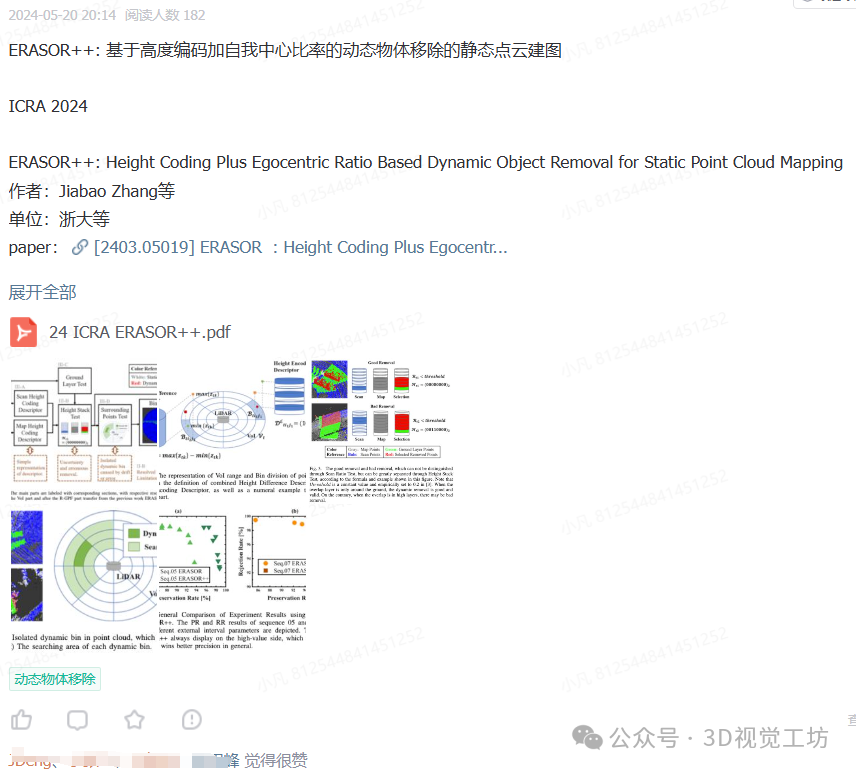
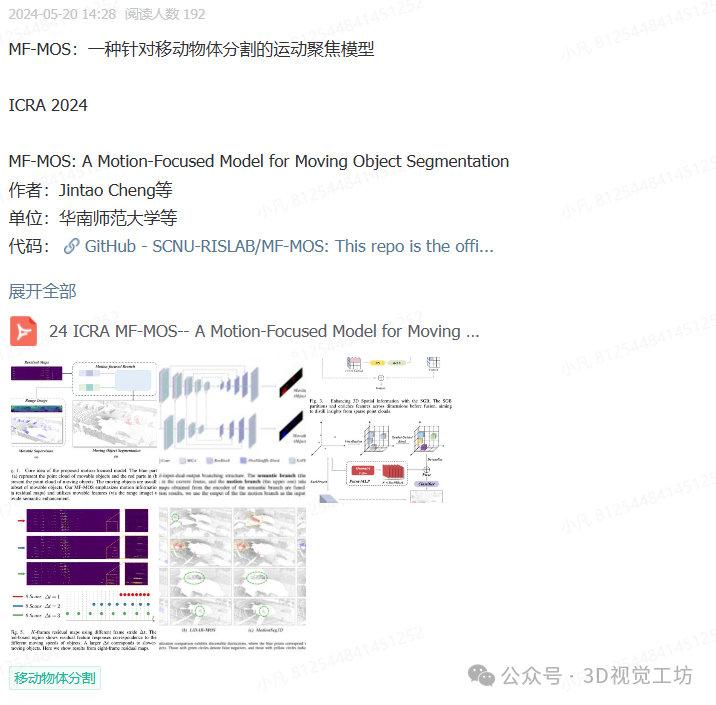
<<< 左右滑动见更多 >>>
专业的智囊团为星球成员答疑解惑

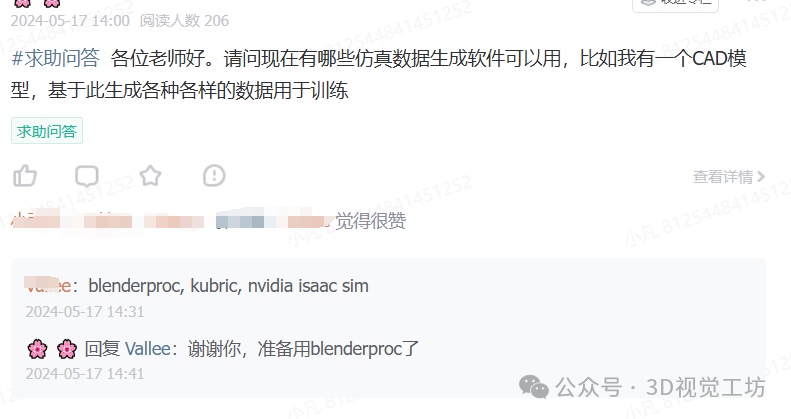
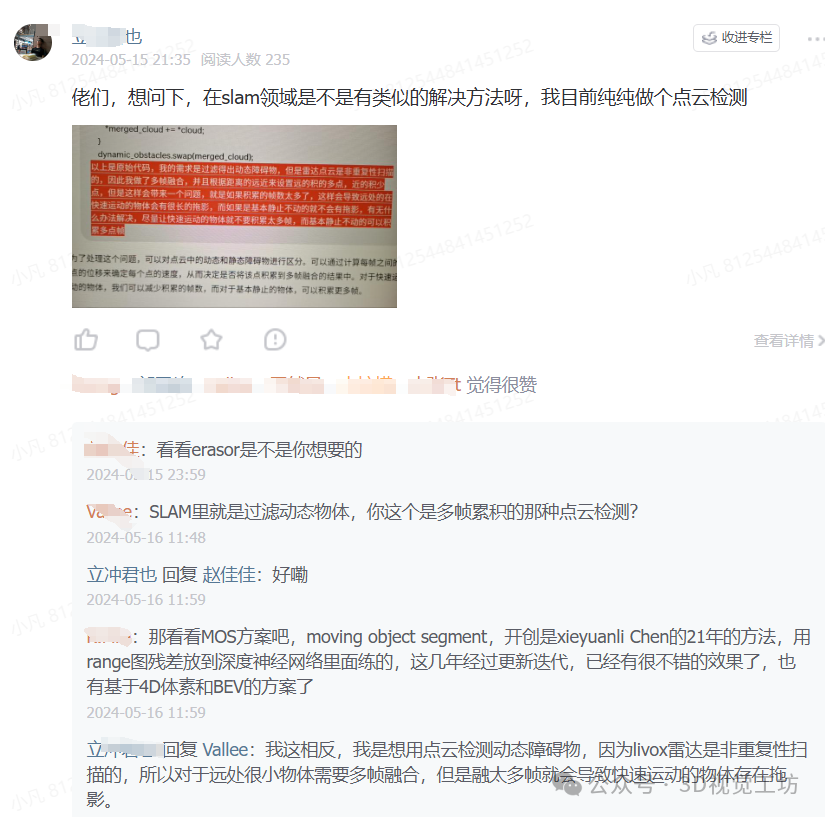
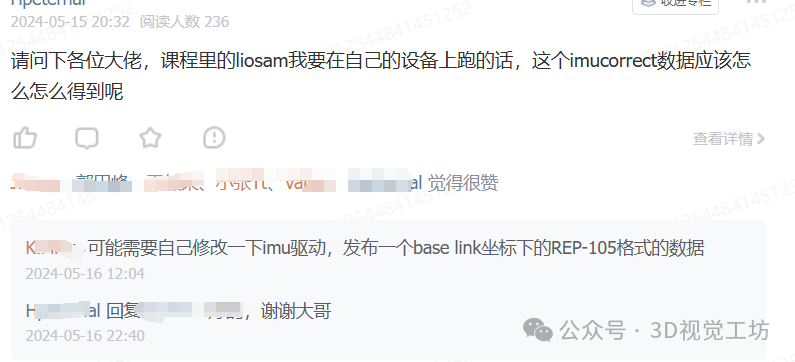
<<< 左右滑动见更多 >>>
海量的行业招聘信息&面经
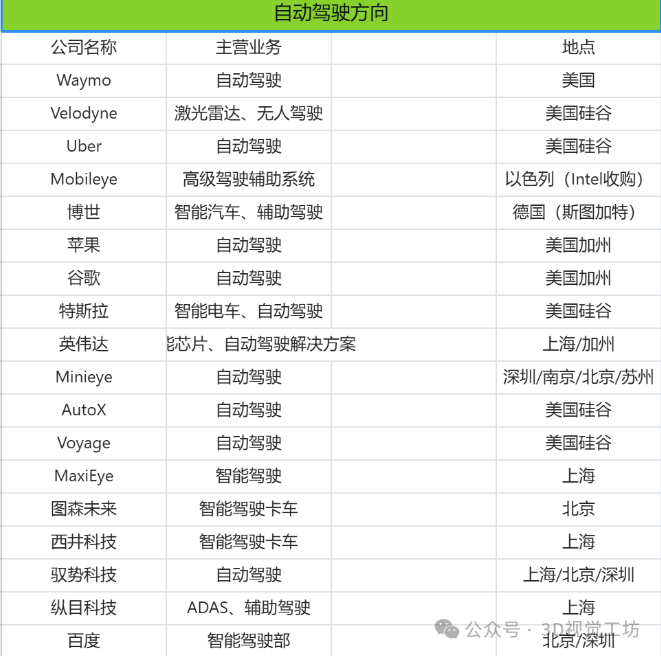
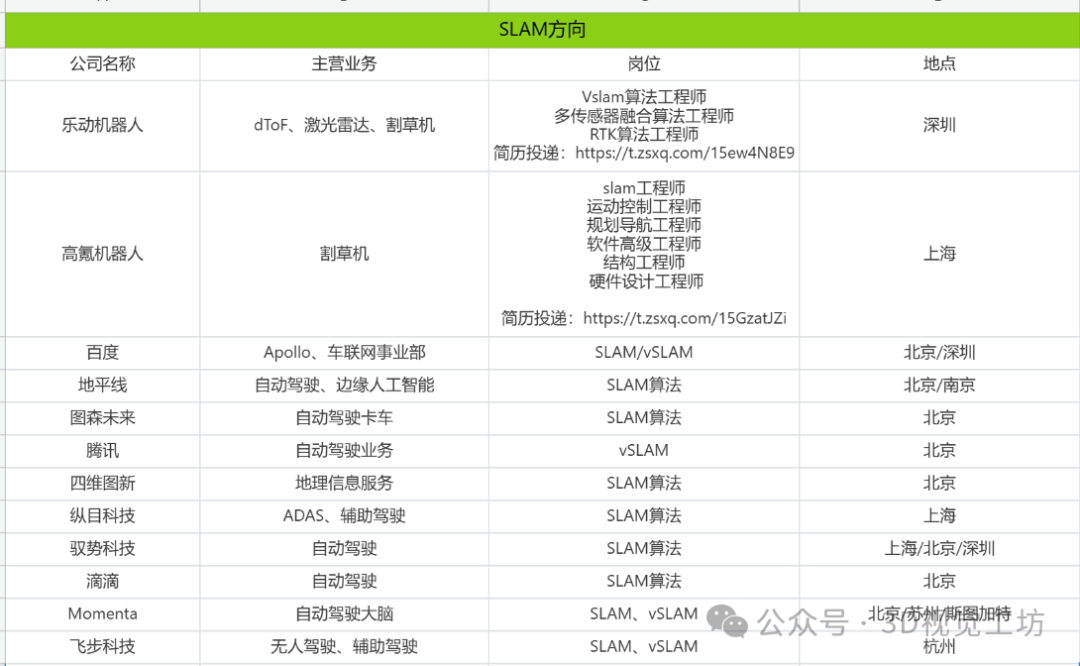
<<< 左右滑动见更多 >>>
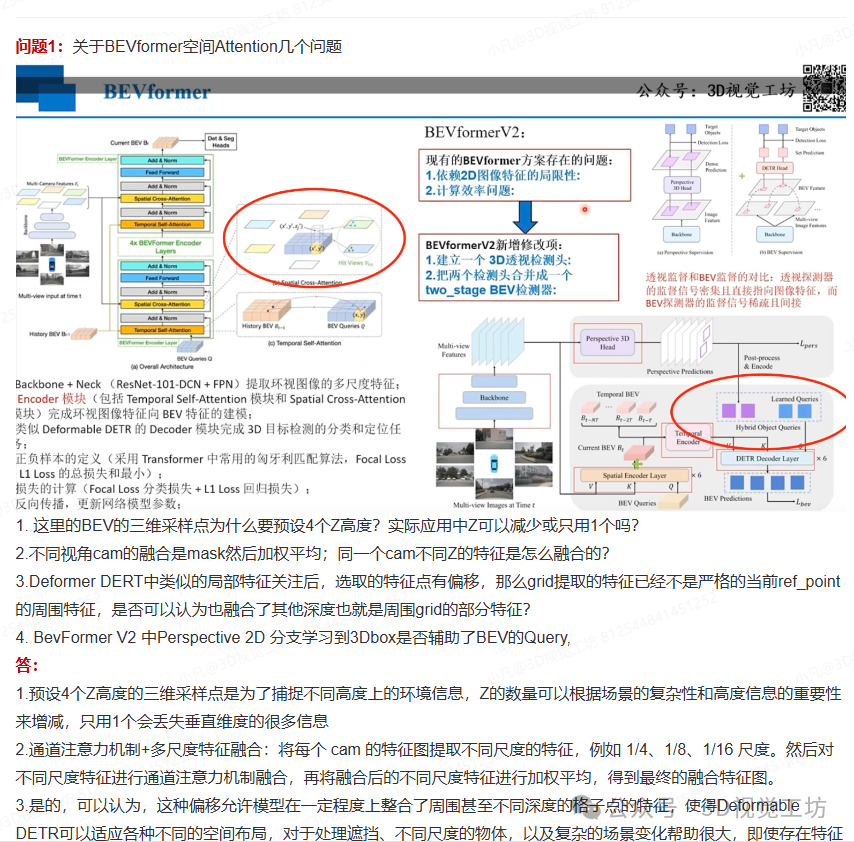
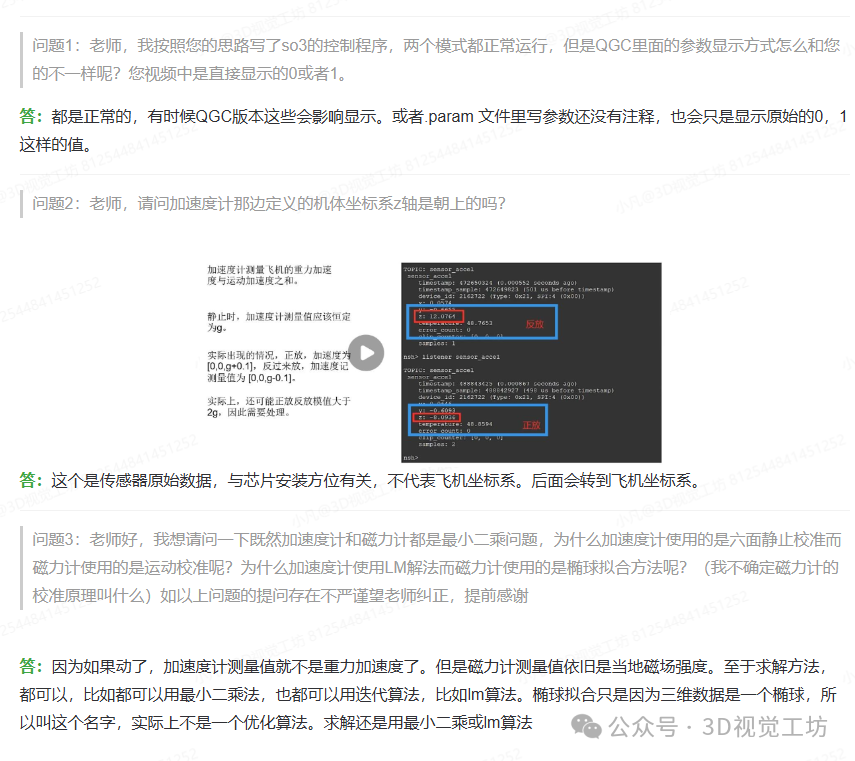
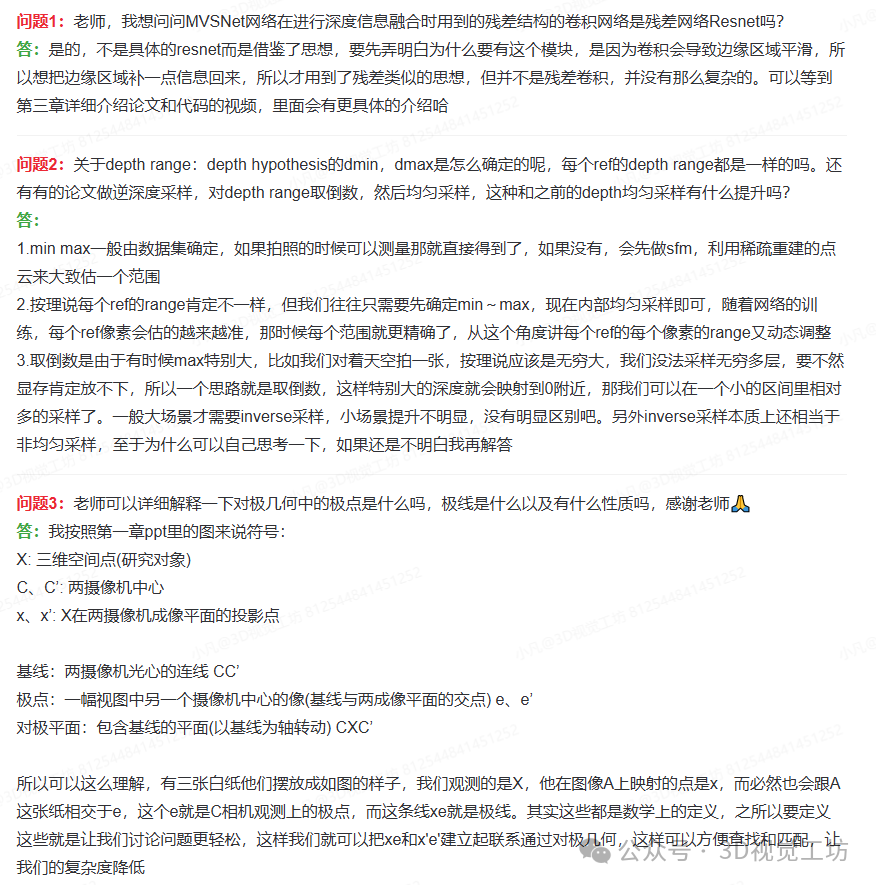
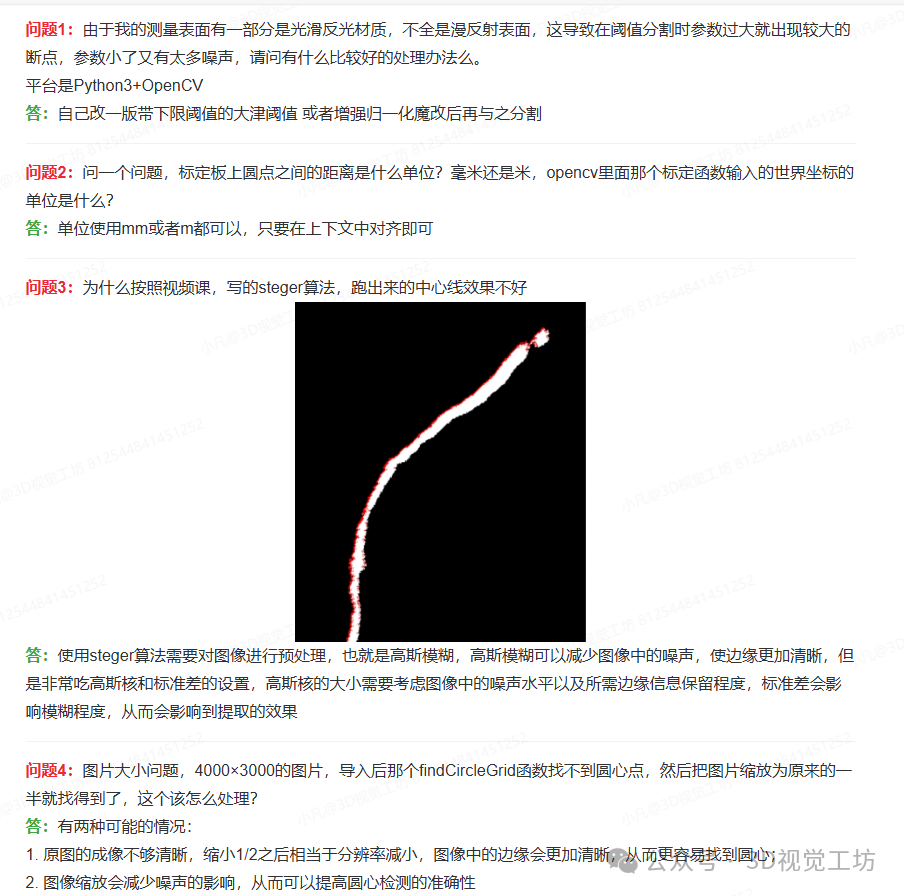
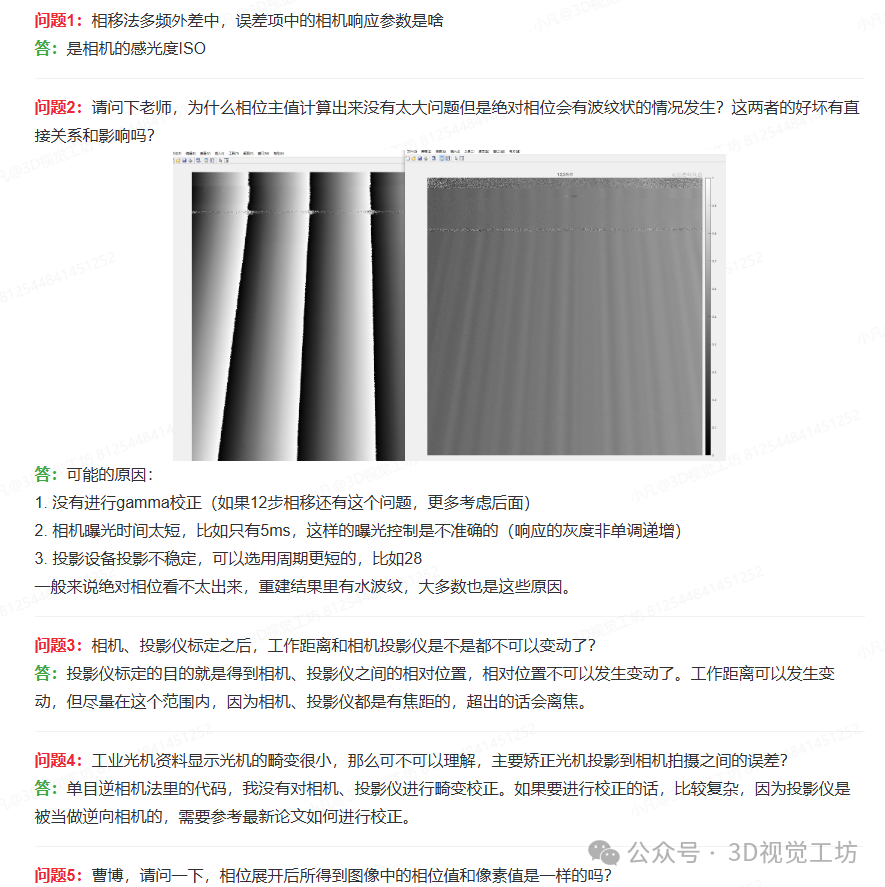
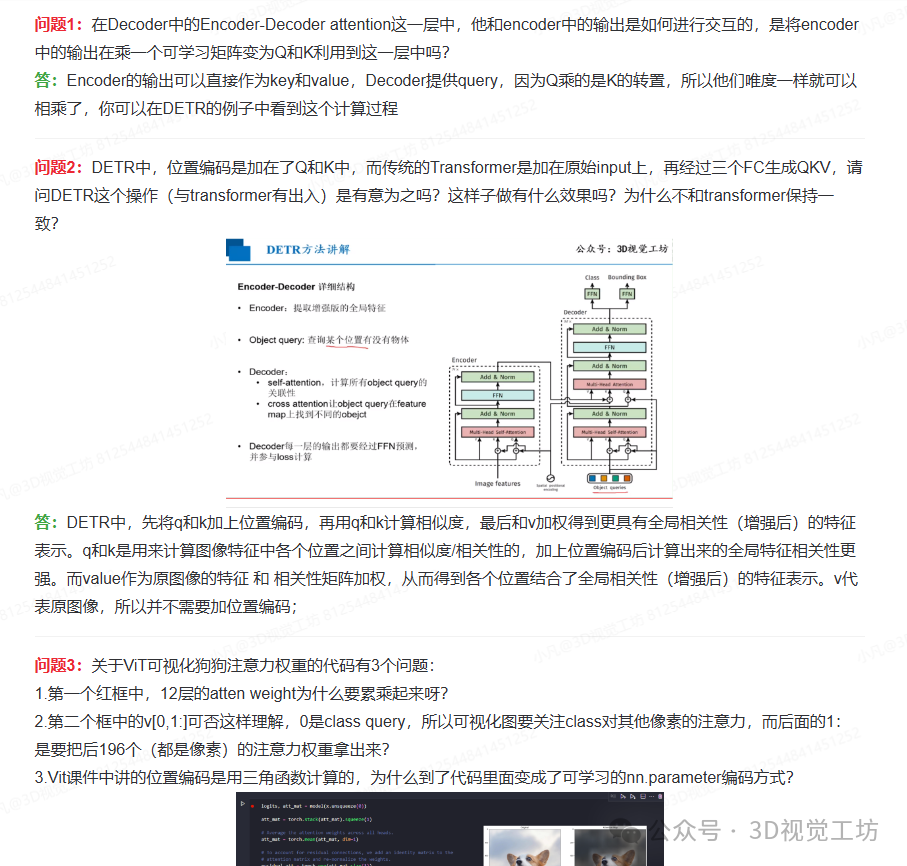
精华问题500问
BEV&Occ
无人机
相位偏折术
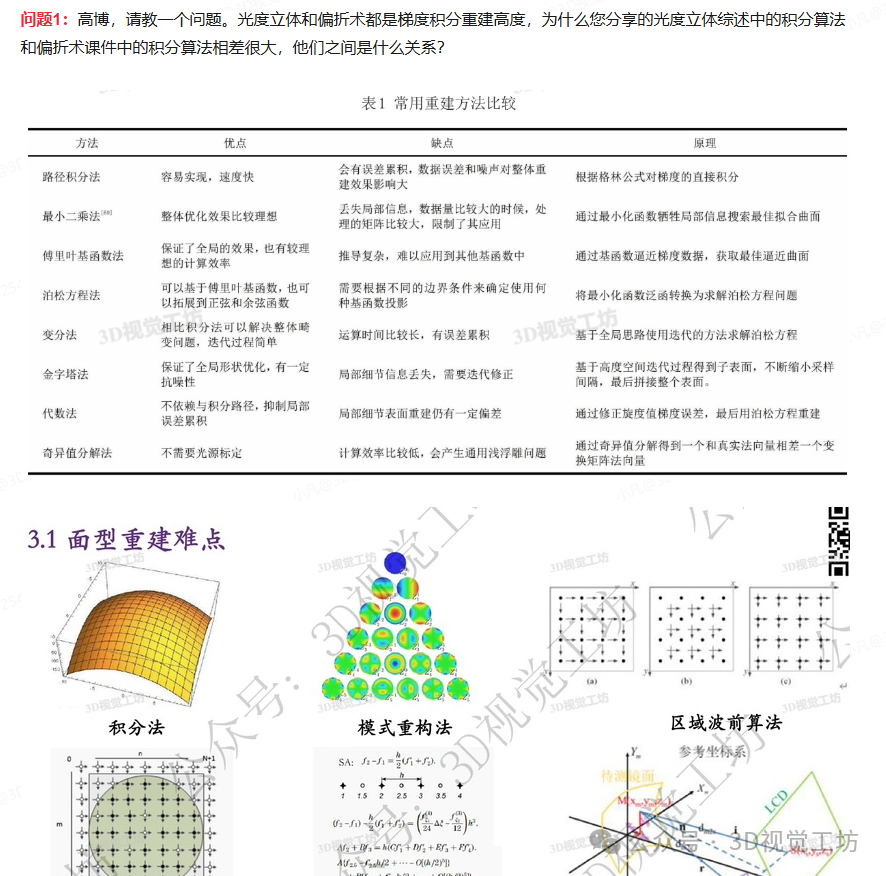
三维重建
线结构光
面结构光
机器人路径规划
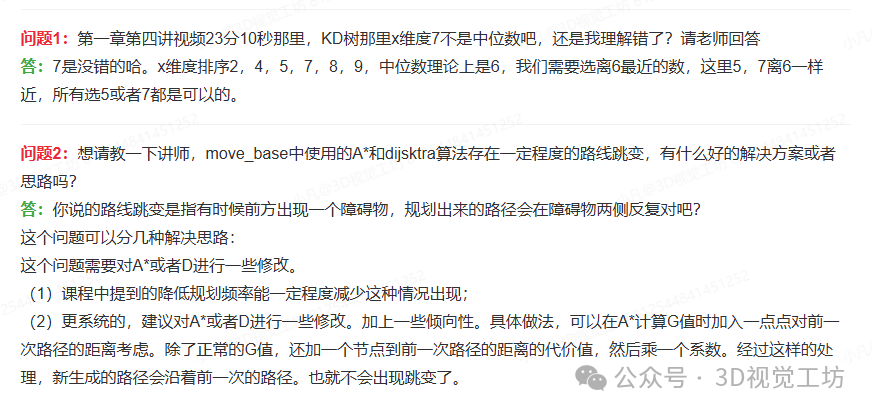
Tranformer
限时特惠福利
学习3D视觉核心技术,扫描查看介绍,3天内无条件退款


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









