






添加小助理:cv3d001,备注:方向+学校/公司+昵称,拉你入群。文末附3D视觉行业细分群。
扫描下方二维码,加入「3D视觉从入门到精通」知识星球(点开有惊喜),星球内凝聚了众多3D视觉实战问题,以及各个模块的学习资料:近20门秘制视频课程、最新顶会论文、计算机视觉书籍、优质3D视觉算法源码等。想要入门3D视觉、做项目、搞科研,欢迎扫码加入!

明敏 克雷西 发自 凹非寺
量子位 | 公众号 QbitAI
一句话提示,Claude自动化打开Blender将2D图片转为3D建模。
整个过程行云流水。
而且还能只用一次提示词,再基于这个场景搭建可以互动的网页。
背后关键还是最近大火的MCP(Model Context Protocol)——复刻Manus的重要诀窍。
将这套协议和Blender打通,即可获得如上效果。
让原本人工几小时才能搞定的建模工作,如今缩短到几分钟,还不用人插手。
该开源项目BlenderMCP,上线短短3天,GitHub标星已达3.8k。
而且它整出来的建模效果可信任,有人亲测表示,让它设计火星地形,Claude可以自己处理错误和问题,并且会告知人类。
怪不得有人看了直呼:人类已经不太需要设计工具了,amazing!

AI+应用工具正在变强大。

值得一提的是,这种方案可以复刻到其他开源专业工具上。
比如有人已经实现了MCP+QGIS(地理版“PS”),用Claude自动化做感应映射。
“Blender/Cursor都可MCP”
简单理解,BlenderMCP就是将Blender连接到Claude,允许Claude直接和Blender交互并控制Blender。
基于BlenderMCP还能完成许多事。
比如创建一个由龙守卫一罐黄金的地牢场景。
提示词:Create a low poly scene in a dungeon, with a dragon guarding a pot of gold.
这个过程里,指令遵循效果不错。
特意强调了low poly(低多边形),最后搭建的成果里龙和罐子都是圆滚滚的。

还能去搭建逼真的海滩场景。
提示词:Create a beach vibe using HDRIs, textures, and models like rocks and vegetation from Poly Haven.
这条指令要求利用来自Poly Haven的HDRIs、纹理以及岩石、植被等来建模海滩。
Poly Haven是一个免费开源的3D资源网站,可以看到Claude能够直接自己去下载使用资源。
其余可以尝试的能力还有:
“把这辆车涂成红色并带有金属质感”
“创建一个球体并将其置于立方体上方”
“把灯光设置成摄影棚的效果”
“将相机对准场景,并使其呈等距视角”
作者在项目页中介绍,BlenderMCP能实现的能力包括创建、修改和删除3D对象;使用、修改材料和颜色;场景检查以及代码执行。
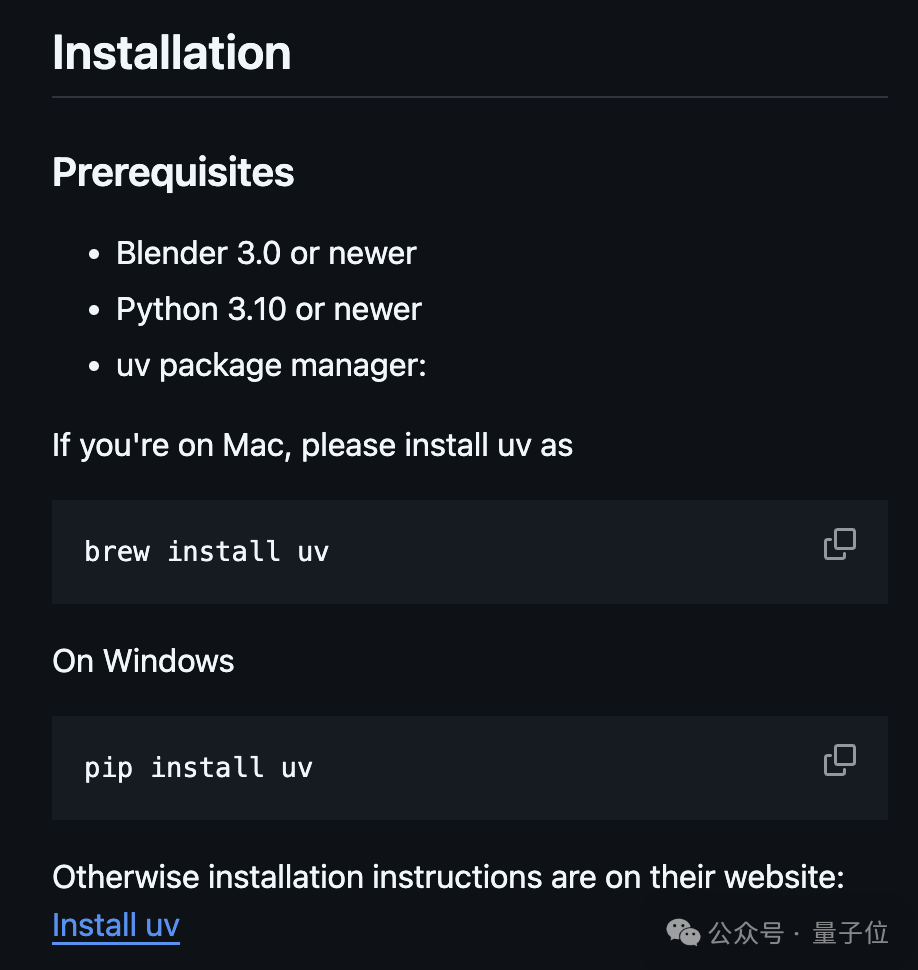
这个系统主要由两部分组成,Blender Addon和MCP Server。
前者是一个Blender插件,可以在Blender中创建一个接受和执行命令的服务器。后者就是用来实现MCP。
具体安装办法,作者已经完全开源到GitHub上。
除了将MCP接入到Blender,网友们还在尝试用它升级各种工具。
甚至是AI编程软件,也会因为使用MCP后变得更加自动化。
有人在Cursor上使用MCP协议同时接入了Slack和GitHub,完成了一次新功能开发。
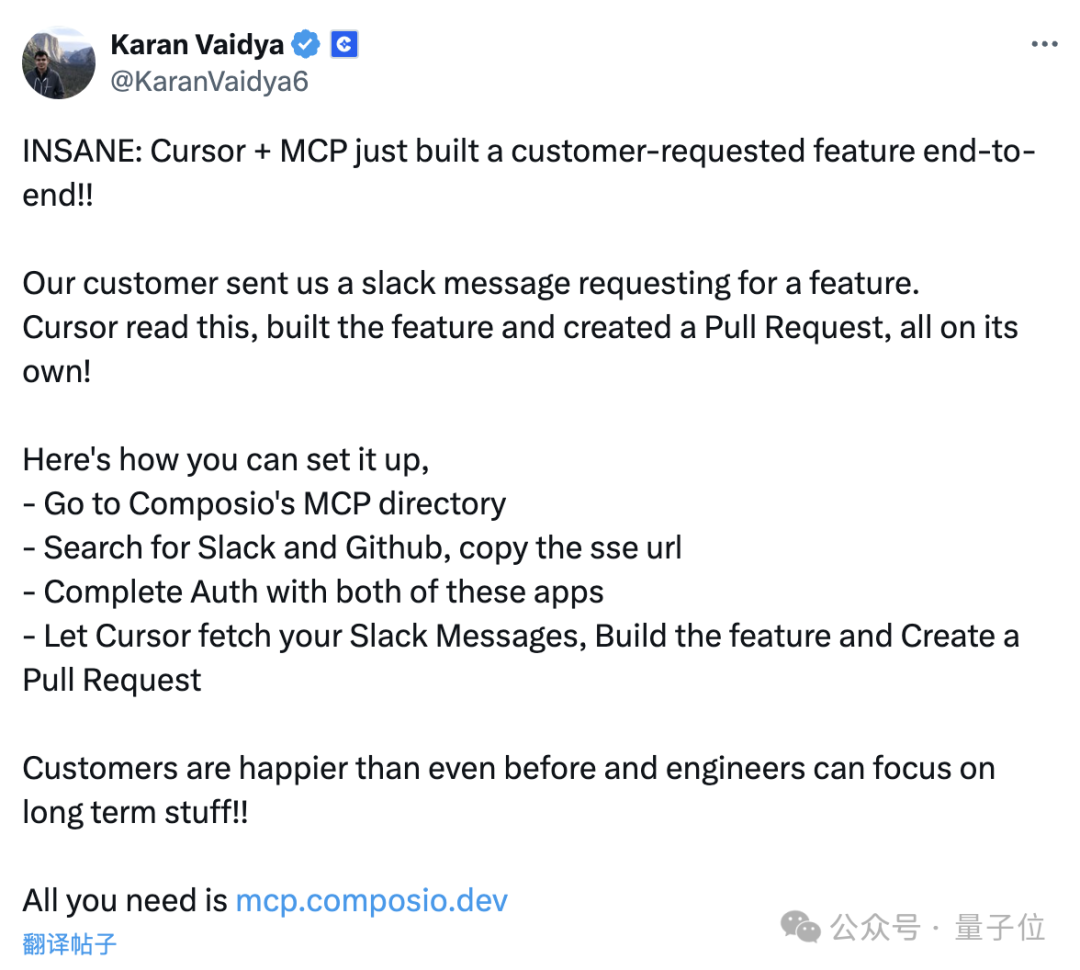
配置好插件并完成认证后,Cursor通过MCP自动读取了Slack中的需求文档,然后从GitHub中拉取代码,并自动完成新功能的编写和上传。
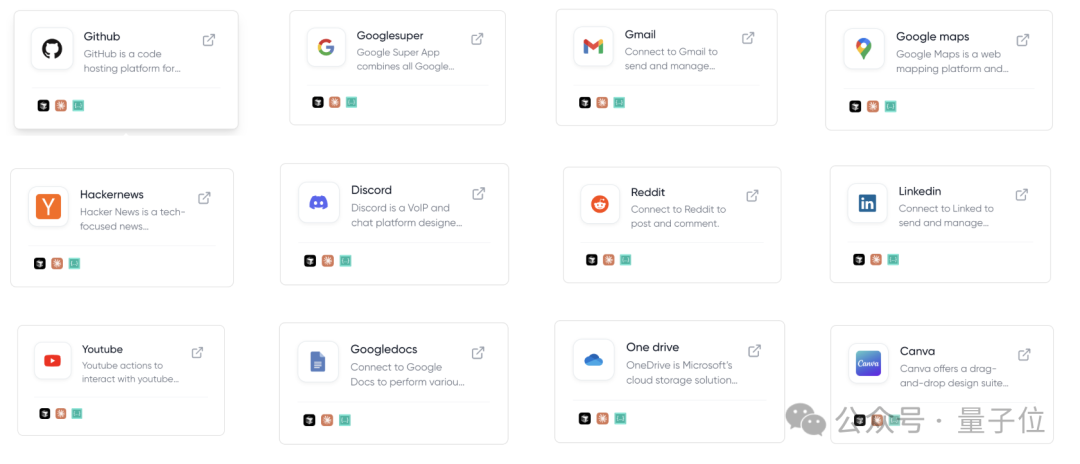
这套操作利用的是一个名为Composio的机构提供的MCP服务,在Cursor中可以通过链接直接配置。
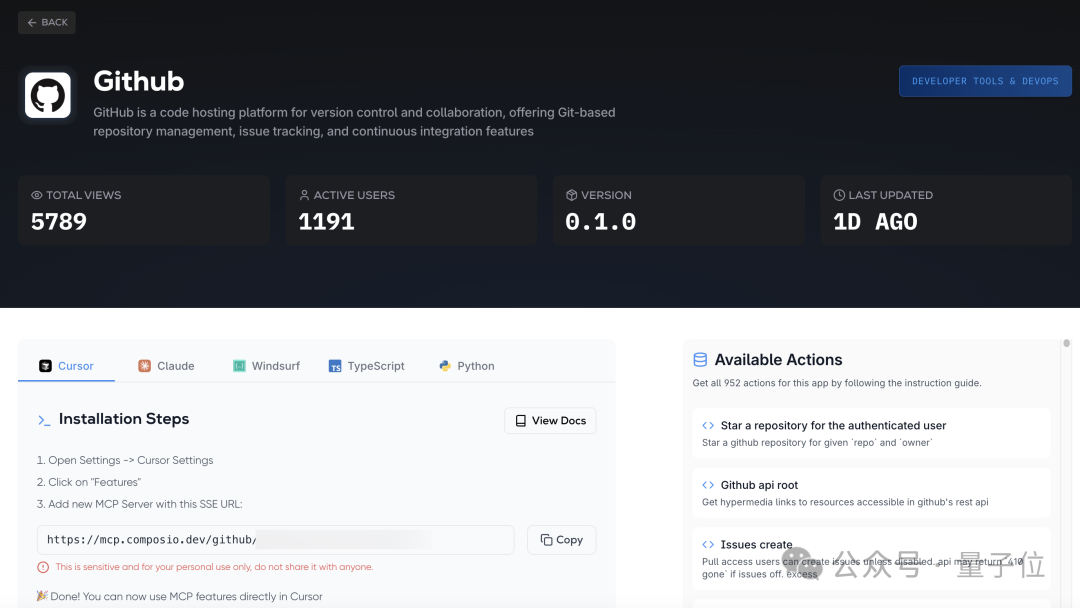
还有GitHub、谷歌搜索、邮箱、地图……都被Composio做成了MCP服务。
除了Composio,还有MCP爱好者自行建立了MCP社区,提供了海量的开源server和client资源。
比如这个MCP服务,可以检索arXiv中的论文,按照教程配置好之后就可以在Claude客户端里直接找论文了。
有意思的是,大模型也是可以被“MCP服务化”的,比如让服务器通过OpenAI兼容API调用其他模型。
甚至是把DeepSeek-R1接入到Claude当中也不是问题。
MCP为啥真强大?
MCP是一种通信协议,是Anthropic提出的,现在Anthropic把它比喻成AI应用的Type-C接口。
并且Anthropic已经打算牵头把MCP协议推动成行业开放标准。
实现大模型应用与外部数据源和工具之间的无缝集成,帮助AI获得所需的上下文数据,生成质量更高、与任务更相关的回答。
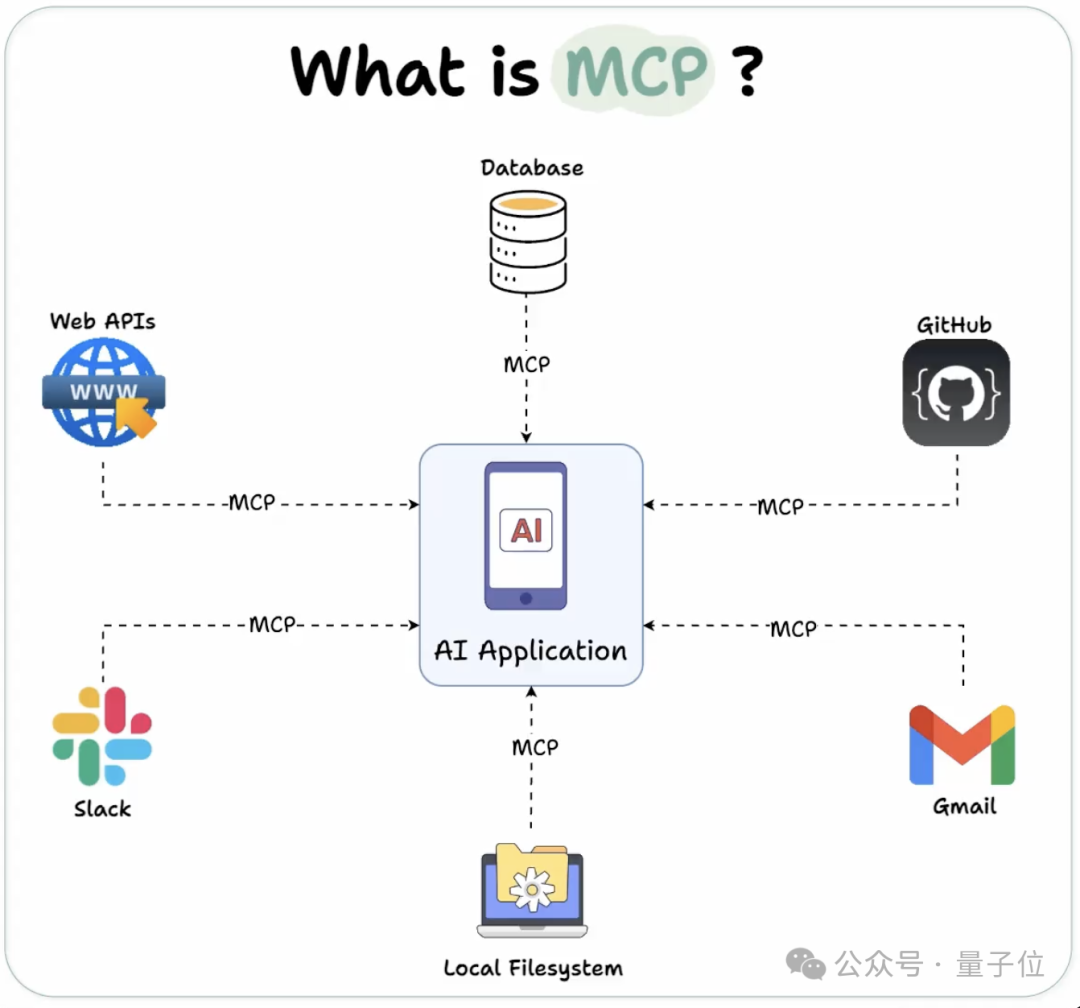
MCP主要解决的是全球应用玩家们都面临着的一个相同的痛点——数据隔离。
它就像AI系统与数据源之间的一座桥梁,允许开发者在数据源和AI工具之间建立双向连接。
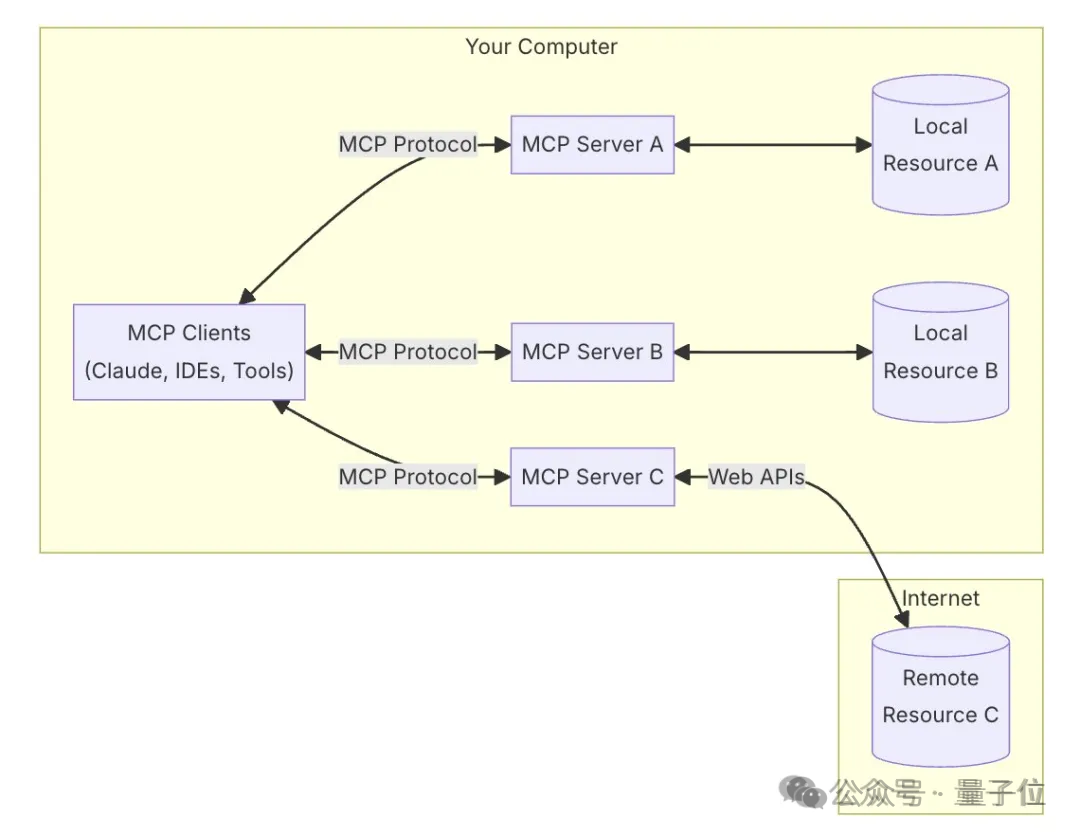
MCP采用客户端-服务器架构,多个服务可以连接到任何兼容的客户端。客户端可以是Claude Desktop、IDE或其他AI工具,服务器则充当适配器,暴露数据源。
其优势在于,以后不管是访问本地资源(数据库、文件、服务),还是访问远程资源(如Slack、GitHub API),都能用同一个协议。
而且支持的数据形式非常多样,包括文件内容、数据库记录、API响应、实时系统数据、屏幕截图和图像、日志文件等,几乎覆盖了所有类型。
MCP服务器还内置了安全机制,允许服务器自己控制资源,不用把API密钥交给大模型。
根据服务来源,MCP主要采用通信机制,本地通信时采用标准输入输出,远程通信则通过SSE进行。
这两种通信方式中的消息,都采用了JSON格式进行消息传输,使得MCP通信过程能够标准化,并带来了可扩展性。
看上去MCP能够调用的服务多而复杂,但实际上开发过程非常简单。
发布时官方公告就明示,当时最新的Claude 3.5 Sonnet自己就非常擅长架设MCP服务器,直接完成闭环。
强大的调用能力、方便的开发流程,又背靠Anthropic,并且也获得了开源社区的关注,MCP似乎有望像Anthropic设想的一样,成为一种未来的AI标准。
但真能如此吗?
持观望态度or悲观态度的人,其实也不少。
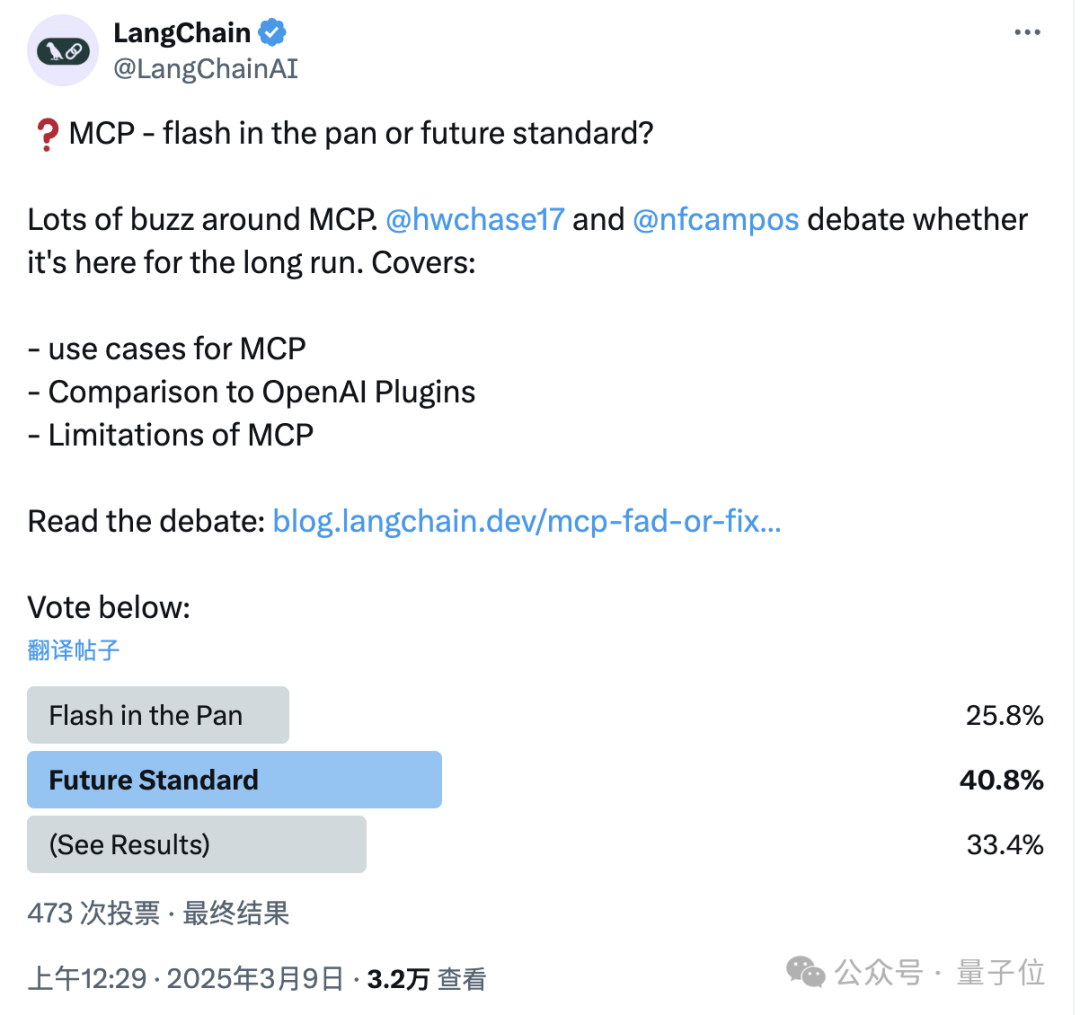
最近知名开源大模型框架LangChain官方也在X上进行了一次投票。
40.8%的人认为MCP是未来标准,而更多人觉得还得再看看。
包括在LangChain内部,也出现了一些分歧。
CEO觉得,MCP降低了Agent接入工具的门槛。
创始工程师则认为,具体到工程层面,还会产生很多定制化需求,很多情况MCP不能完全发挥作用。
MCP要变成像OpenAI的GPTs那样,才能配得上它的热度,但实际上GPTs似乎也没有多受欢迎。

你觉得呢?MCP会是昙花一现吗?
欢迎评论区留言讨论~
GitHub地址:
https://github.com/ahujasid/blender-mcp?tab=readme-ov-file
参考链接:
[1]https://x.com/bilawalsidhu/status/1900240156826939560
[2]https://x.com/bilawalsidhu/status/1900632591516008599
[3]https://x.com/mattpocockuk/status/1898789901824590328
[4]https://x.com/KaranVaidya6/status/1898439847322525963
[5]https://blog.langchain.dev/mcp-fad-or-fixture/
本文仅做学术分享,如有侵权,请联系删文。
3D视觉交流群,成立啦!
目前我们已经建立了3D视觉方向多个社群,包括2D计算机视觉、最前沿、工业3D视觉、SLAM、自动驾驶、三维重建、无人机等方向,细分群包括:
工业3D视觉:相机标定、立体匹配、三维点云、结构光、机械臂抓取、缺陷检测、6D位姿估计、相位偏折术、Halcon、摄影测量、阵列相机、光度立体视觉等。
SLAM:视觉SLAM、激光SLAM、语义SLAM、滤波算法、多传感器融合、多传感器标定、动态SLAM、MOT SLAM、NeRF SLAM、机器人导航等。
自动驾驶:深度估计、Transformer、毫米波|激光雷达|视觉摄像头传感器、多传感器标定、多传感器融合、3D目标检测、路径规划、轨迹预测、3D点云分割、模型部署、车道线检测、Occupancy、目标跟踪等。
三维重建:3DGS、NeRF、多视图几何、OpenMVS、MVSNet、colmap、纹理贴图等
无人机:四旋翼建模、无人机飞控等
2D计算机视觉:图像分类/分割、目标/检测、医学影像、GAN、OCR、2D缺陷检测、遥感测绘、超分辨率、人脸检测、行为识别、模型量化剪枝、迁移学习、人体姿态估计等
最前沿:具身智能、大模型、Mamba、扩散模型、图像/视频生成等
除了这些,还有求职、硬件选型、视觉产品落地、产品、行业新闻等交流群
添加小助理: cv3d001,备注:研究方向+学校/公司+昵称(如3D点云+清华+小草莓), 拉你入群。

3D视觉工坊知识星球
「3D视觉从入门到精通」知识星球(点开有惊喜),已沉淀6年,星球内资料包括:秘制视频课程近20门(包括结构光三维重建、相机标定、SLAM、深度估计、3D目标检测、3DGS顶会带读课程、三维点云等)、项目对接、3D视觉学习路线总结、最新顶会论文&代码、3D视觉行业最新模组、3D视觉优质源码汇总、书籍推荐、编程基础&学习工具、实战项目&作业、求职招聘&面经&面试题等等。欢迎加入3D视觉从入门到精通知识星球,一起学习进步。

卡尔曼滤波、大模型、扩散模型、具身智能、3DGS、NeRF、结构光、相位偏折术、机械臂抓取、点云实战、Open3D、缺陷检测、BEV感知、Occupancy、Transformer、模型部署、3D目标检测、深度估计、多传感器标定、规划与控制、无人机仿真、C++、三维视觉python、dToF、相机标定、ROS2、机器人控制规划、LeGo-LAOM、多模态融合SLAM、LOAM-SLAM、室内室外SLAM、VINS-Fusion、ORB-SLAM3、MVSNet三维重建、colmap、线面结构光、硬件结构光扫描仪等。

3D视觉模组选型:www.3dcver.com

— 完 —
点这里👇关注我,记得标星哦~
一键三连「分享」、「点赞」和「在看」
3D视觉科技前沿进展日日相见 ~


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









