










二月的最后一篇水文…想写一些有意思的东西。
文章目录
环检测在图数据结构中的应用
我们在图数据结构场景中会有一些判断是否存在环的需求,大多数的判断场景是在有向图中:
- 比如我们在图数据存储场景中想要拓扑好友关系,比如查找某一个人到另一个人的好友关系链,这个检索过程需要是一个有向无环图的检索过程,是不能出现环的,需要在检索过程中能够检测到环的存在。
- 再比如 我们在分布式事务场景中,比如悲观事务的实现中往往需要有一个 单key 事务锁 在并发场景的 wait 锁关系的构造 Rocksb 事务锁实现 – 死锁检测部分,这个时候需要对多个事务的 wait锁 之间的互相等待关系构造一个 wait-circle,并且需要在一个元素插入之后检测改有向图是否存在环,存在则需要回退这次的插入。
当然,实际应用到图存储/计算的场景还有很多,对环的检测需求也都是一直存在的。
深度/广度优先 检测环
在这种场景下我们一般检测环存在的做法是遍历图,主要使用两种方式 (bfs/dfs) :
这两种实现方式都比较简单,利用一个visited 数组保证访问过程中除非遇到环,否则不会访问到自己。
下面这个有向图在遍历的过程中会出现环,在分布式事务的场景下 wait-circle 就是出现死锁了,这种情况下是必须要检测出环的。
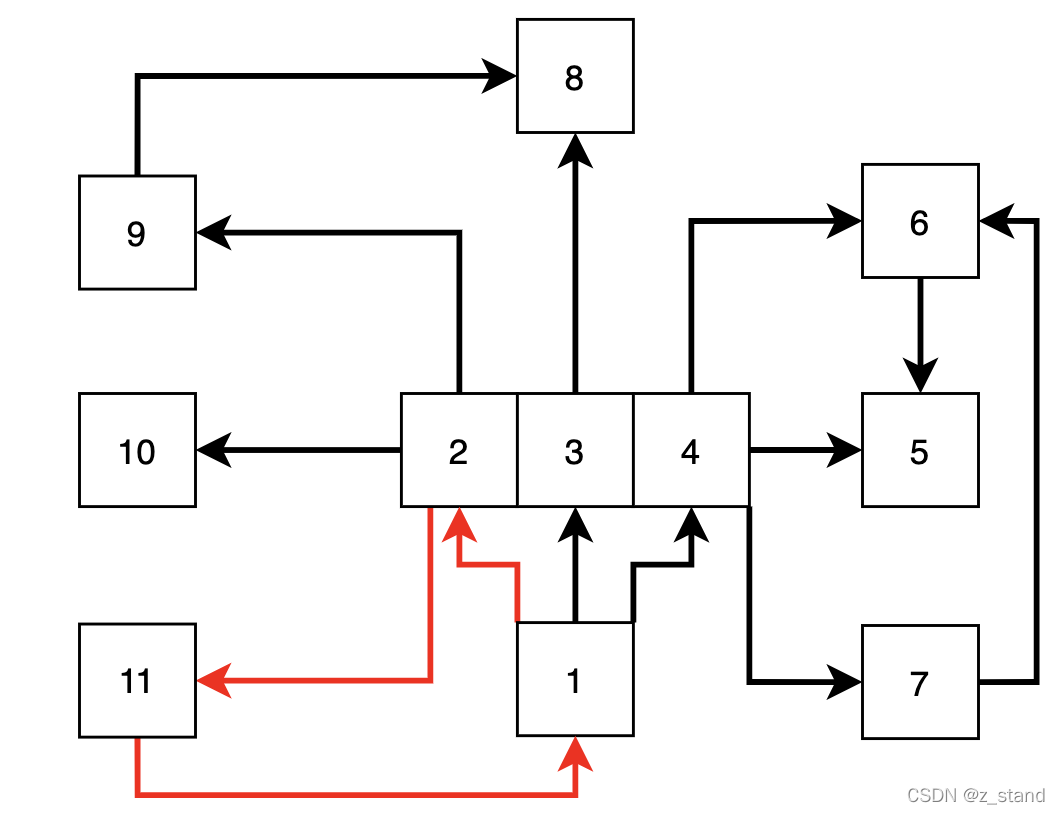
如下使用深度优先搜索来进行环的查找,前置条件就是使用邻接矩阵来标识图中的顶点,比如坐标[i,j] = 1,标识i --> j 即顶点 i 和顶点 j 连通;为 0 则表示两个顶点不连通。
查找的算法也很简单:
- 增加辅助访问数组 visited,标识顶点 i 被访问过。
- 遍历邻接矩阵 且 visited 为 false 的顶点
- 深度优先搜索 所有以 i 为顶点的 [i,j] = 1 即 i --> j ,i --> k的顶点,如果发现某一个顶点 visited[j]=true,那么就标识已经找到环了,否则继续深度优先查找。
// 通过邻接矩阵 matrix 保存有向图
vector<vector<int>> matrix;
bool isCircle(){
// 初始化visit 数组,标识已经访问过的节点
int m_size = matrix.size();
vector<bool> visited(m_size, false);
for (int i = 0;i < m_size; i++) {
if (!visited[i]) {
// 传入当前访问的下标,访问标识数组,最后就是父节点(上一个访问的节点)
// 找到了环,就返回真即可.
if (dfs_search(i, visited)) {
return true;
}
}
}
// 整个矩阵都遍历完成还是没有找到,就认为是无环
return false;
}
// dfs 查找环
bool dfs_search(int current_idx, vector<bool>& visited) {
visited[current_index] = true;
// 查找 current_idx 即当前节点的连通节点
for (int i = 0;i < matrix[current_idx].size(); i++) {
// 如果为1,则标识当前current_idx 指向 i,那么check一下这个指向的节点是否访问过,
// 那就是找到环了。
if (matrix[current_idx][i] == 1) {
if ( visited[i] && i != current_idx) return true;
else {
if (dfs_search(i, visited)) return true;
}
}
}
return false;
}
广度优先算法也很类似(层次遍历),同样是通过visited 辅助数组来实。
和dfs的差异只是利用队列来提前将 current_idx 的所有指向的兄弟节点先添加到队列中,再进行下一层的查找,如下代码。
// 通过邻接矩阵 matrix 保存有向图
vector<vector<int>> matrix;
bool isCircle(){
int m_size = matrix.size();
vector<bool> visited(m_size, false);
// 保存当前访问的顶点
for (int i = 0;i < m_size; i ++) {
if (!visited[i]) {
if (bfs_search(i, visited)) return true;
}
}
return false;
}
bool bfs_search(int curr_idx, vector<bool>& visited) {
queue<int> qu;
qu.push(curr_idx);
visited[curr_idx] = true;
while (!qu.empty()) {
int size = qu.size();
// 按层遍历
for (int j = 0;j < size; j++) {
int curr_idx = qu.front();
qu.pop();
// 需要将 curr_idx 所有的临接顶点 先check 环是否存在,不存在则添加到queue中
for (int k = 0;k < matrix[curr_idx].size(); k++) {
if (matrix[curr_idx][k] == 1) {
if (curr_idx != k && visited[k]) return true;
else {
qu.push(k);
// 标记 curr_idx --> k 的 k顶点已经被访问过了
visited[k] = true;
}
}
}
}
}
return false;
}
以上两种实现方式都是非常基础的图中的环的检测,都是是能够正确得检测出环的存在。
但是性能问题却很明显,每一次的检测都需要对整个图进行一个大的scan,对于一个 m*n 的超大矩阵 (我们普通的分布式图存储集群中往往拥有超过百万/千万级别的顶点和 总数目近万亿的边),在这样的图网络中去检测环,利用上面的方式效率可以说是极低的。当然,现在最通用的解决办法就是限制查找的层数。
索引好友关系列表的话也仅仅只会索引3度的出边列表,在分布式事务中的wait-circle 中也会限制死锁检测的深度;但是当我们想要查找两个无关顶点之间的最短到达路径的时候,这个过程中的环检测避免不了,那有没有更加高效的算法,在不用每次插入一个元素都进行一次全链路遍历检测环呢?
当然有~~~, 聪明的人无处不在,并查集 应运而生。
并查集数据结构 (Union-Find)
基本概念
并查集是一种数据结构,其支持对不相交的集合(disjoint sets)执行如下一些操作:
- makeSet(e) 这是 并查集数据结构中的一个操作,用来将输入的元素 e 插入到一个集合中,并返回包含这个元素e 的集合的根节点。
- Union(A,B) 合并两个集合 A,B
- Find(e) 返回包含元素e 的集合
基本概念其实是很晦涩的,直接来看并查集的这几个操作就好。
并查集中的集合元素组织有两种形态:链表形态 和 树形态。
原本我们的链表/树 形态,会记录 parent–>child 或者 prev --> next 这样的关系,而并查集中对数据集的标识 是记录 next 的 prev节点 或者说 是记录 child 的 parent 节点信息。
其中树形态的并查集 表示 方式其实是链表形态的一种优化(路径压缩),能够极大得降低元素查找的层数;当然, 在图的环优化中,这两种形态可以分别用于有向图(链表形态,保存了集合中的方向关系)和 无向图(不需要方向关系)的表示。
接下来,我们看看并查集的每个操作实现。
初始化
对集合中的每一个元素,他们的父节点应该为 空 或者 也可以指向自己(指向自己的这种初始化方式就不能应用在图的环判断中了,可以用于正常的集合操作)。
本文演示均用-1 表示空
虽然前面说并查集的数据结构 有两种形态, 链表或者树,但是实际我们应用的时候,可以采用数组/无序map 的方式就够了。
unorder_map<int,int> father;
void Add(int ele) {
if (!father.count(ele)) {
father[ele] = -1;
}
}
合并 union
这个操作主要是check 两个节点是否可以连通(祖先是不同的), 如果是连通的,那就要进行合并,让他们拥有相同的祖先。
这里两个节点 谁当祖先都是可以的。
void union(int x, int y) {
int x_root = find(x);
int y_root = find(y);
// 祖先不同,则发现是两个不同的集合,则可以对他们进行合并
if (x_root != y_root) {
fater[x_root] = y_root;
}
}
查找祖先
如果节点的父节点不为空,那就需要持续查找,直到找到父节点为空的节点,就是当前输入的ele 的祖先节点。
我们想要查找节点 12 的祖先节点,就需要不断的check father节点,直到father节点为空(或者是自己)。
int find(int ele) {
int root = ele;
while (father[root] != -1) {
root = father[root];
}
return root;
}
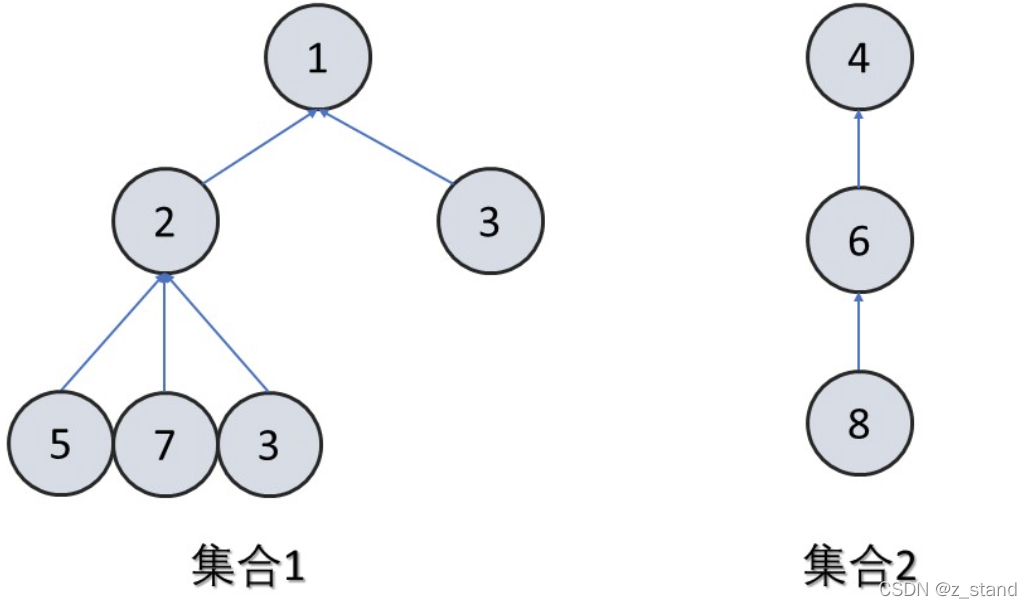
这里是有可以优化的地方,我们希望在并查集中的节点分布能够更接近树形态,而不是链表形态。毕竟树形查找的复杂度是小于等于(O(log_n)),也就是我们可以将链表形态的并查集结构转换为树形态。
这样做可行的原因是 对于并查集中的节点来说连通性是可以传递的, 节点之间互相连通的标记只需要拥有一个相同的祖先就好了。
大体过程如下:
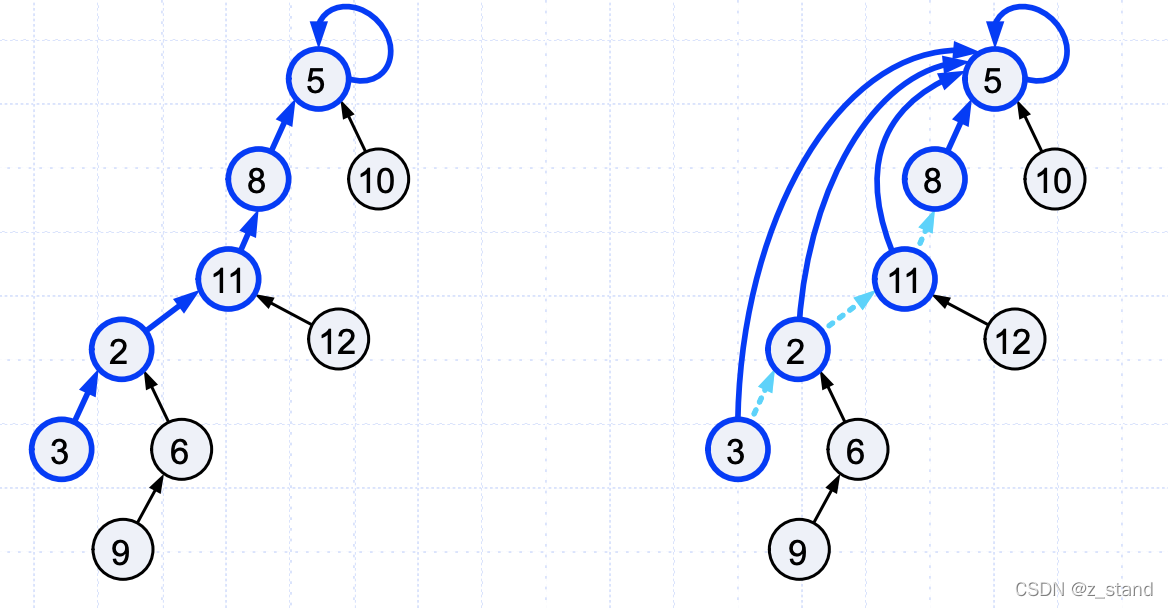
就是将上图中左侧一段链式结构可以合并成右侧的树形结构。
优化1: 合并过程 利用 rank 优化路径
rank 是一个在前面father基础上额外增加的一个数据结构,标识当前节点距离祖先节点的长度,这样我们的初始化以及合并代码就变成下面的样子:
typedef struct UnionFindNode {
UnionFindNode* father;
int rank;
UnionFindNode() : father(nullptr),rank(0) {}
bool operator==(const UnionFindNode& lhs) {
return father == lhs.father && rank == lhs.rank;
}
}Node;
void MakeSet(Node& ele) {
ele.father = nullptr;
ele.rank = 0;
}
void Union(const Node x, Node y) {
// 找到他们的公共祖先节点
auto xRoot = Find(x);
auto yRoot = Find(y);
if (xRoot == yRoot) {
return;
}
// 他们不在同一个集合,则需要合并他们的祖先。
// 将距离比较短的合并到距离长的祖先上。
if (xRoot->rank < yRoot->rank) {
xRoot->father = yRoot;
} else if (xRoot->rank > yRoot->rank) {
yRoot->father = xRoot;
} else { //rank 相等,互相指向谁都无所谓,需要增加指向后的被指向节点的rank(增加了一个元素的深度)。
xRoot->father = yRoot;
yRoot->rank += 1;
}
}
优化2: 路径压缩(Path Compression)
当然,以上优化方式也能够利用rank 达到我们将链表转换成树的目的,但是需要一个额外的rank 字段,每一个节点都会多消耗4bytes 的内存 。
其实还有一种更简洁优雅的优化方式,就是 路径压缩。
rank 的优化是在 Union 操作的时候,这里路径压缩 则是在 Find的时候。
// 还是继续使用基本的 unorder_map 保留信息
unordered_map<int, int> father;
// 查找节点 i 的祖先节点
int Find(int i) {
int root = i;
// -1 是我们在最前面 Add 一个新的并查集节点的时候
// 会将这个节点的父节点设置为 -1,标识它目前是一个单独的集合。
while(father[root] != -1) {
root = father[root];
}
// 路径压缩的过程
while (i != root) {
int origin_father = father[i];
father[i] = root;// 关键!进行路径压缩,将节点i 的父节点直接指向祖先节点。
i = origin_father;
}
return root;
}
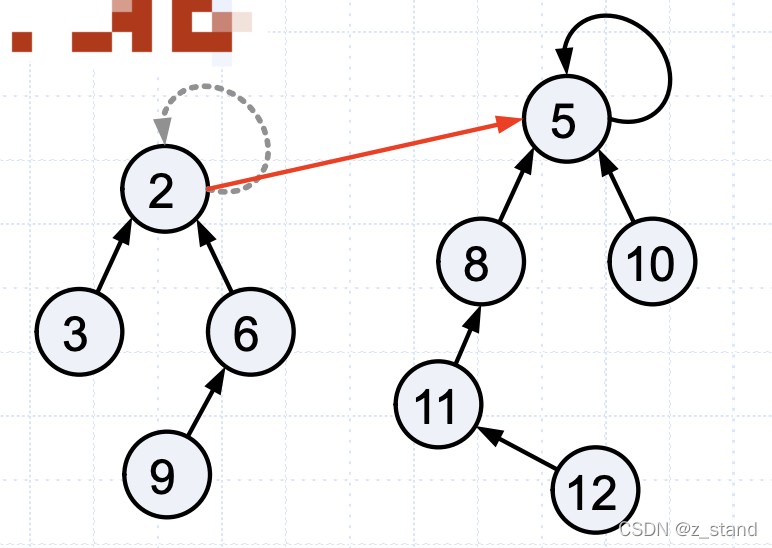
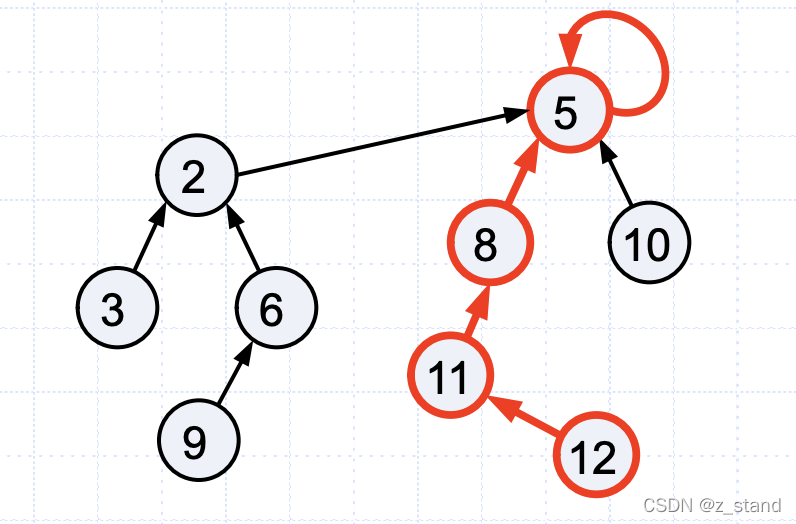
比如对于这样的一个并查集集合,我们想要查找 6。
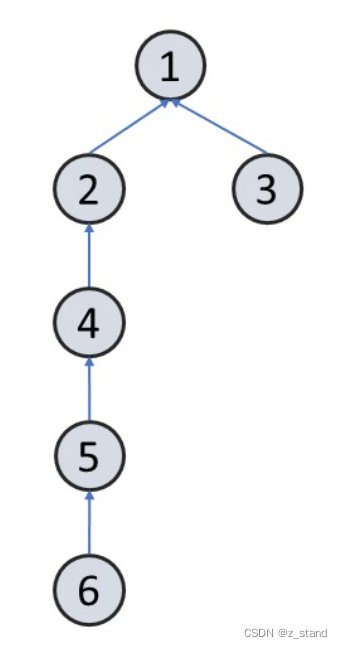
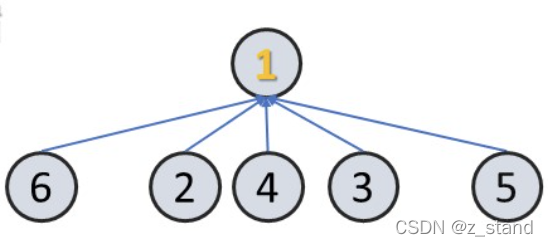
经过路径压缩之后, 6 包括整个之前的节点都会尝试进行一次路径压缩。
关于路径压缩的时间复杂度证明较为复杂,这个推演是通过 阿克曼函数 进行推演的。
总之表示方式是 O(log*n),其中 log*n表示 n 取多少次
l
o
g
2
n
log_2n
log2n并向下取整之后变成1,可以理解为是 O(1) 级别。
比如 log*2^65526 ,2^65536 在阿克曼函数中表示的是 A(4,3) 的结果,基本是人类思维极限的数字,而 在 log*n 下仅仅只有 5。
关于路径压缩时间复杂度的推演 以及 证明 可以参考 The math in Union-Find.
并查集 解决图中检测环问题
回到我们最初 图中检测环的问题,我们接下来可以利用并查集的几个操作轻松解决。
对于 0 --> 1 --> 2,构造出来的并查集结构 经过路径压缩 是 0 --> 2 <-- 1 ;而如果存在环,也就意味着 2 --> 0,对于并查集来说 我们只需要 提前 find (0) 和 find(2) 是否相等,如果相等,则认为当前的插入是会造成环的(0 已经存在 且 其祖先节点是2)。
实现如下:
class UnionFind {
public:
// void Add
// void Union
// int Find
// bool IsConnected
private:
unordered_map<int,int> father_;
}
// 通过邻接矩阵 matrix 保存有向图
vector<vector<int>> matrix;
bool IsCircle() {
UnionFind uf;
for (int i = 0;i < matirx.size(); i++) {
// 添加每一个节点到并查集之中
uf.Add(i);
for (int j = 0;j < i; j++) {
if (matrix[i][j]) {
int x_root = Find(i);
int y_root = Find(j);
// 发现了两个不同节点的祖先节点相等,则找到了环
if (x_root == y_root && i != j) return true;
// 否则,是两个可以连通的节点,那就需要合并这两个集合(他们的祖先直接合并就好了)。
if (x_root != y_root) uf.Union(x_root,y_root);
}
}
}
return false;
}
通过并查集,我们能够在有节点更新的情况下非常高效得O(1) 的时间内确认这个节点插入后图中是否存在环。
除了检测环之外,并查集在图数据结构的其他方向也有非常高效的应用,比如确认图中两个顶点是否连通,高效合并两组无关联的图等等。
总的来说,并查集这个数据结构 利用阿克曼函数 在集合论 以及 图数据结构领域中 能够非常高效得判断集合交集 以及 图节点连通情况,思想值得学习研究。

















 924
924

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









