







1 背景
在控制系统、任务管理系统等设计中,系统行为往往依赖系统当前的模式(或状态)。在系统设计时,会给出系统模式的判定逻辑。系统模式应是互斥的,也即不允许在同一时刻超过一个模式被判定为真。
当系统模式的判定逻辑较为复杂,尤其包含了时序关系时,模式之间是否满足互斥,靠人工检查很难得出可靠的结果。如果在系统设计时不能保证互斥性,则将导致设计缺陷,可能要到系统测试甚至运营时才会暴露。
本文讨论一个模式互斥检查的实例。该实例与具体应用场景不相关,但以类似的方式可以应用于飞行阶段等场景的互斥性检查。
2 实例
一组描述模式切换的需求如下:
Req01:当事件P发生后,系统应进入M1模式,并在接下来至少5s内保持不变;
Req02:当alt大于等于200且小于1000, wow为False且持续时间至少200s时,发生事件Q;
Req03:当事件Q发生后,系统必须在1s到2s内切换到M2模式;
Req04:M1、M2不能同时成立;
上述需求与具体场景无关,为使其具有代表性,包含了多种时序关系,以及事件、状态逻辑。其中,Req04是一条安全性需求,要求M1、M2模式互斥,也是本例的检查对象。
3 需求结构化
为了能够进行自动化需求检查,需对上述自然语言需求进行结构化转换,如下图。
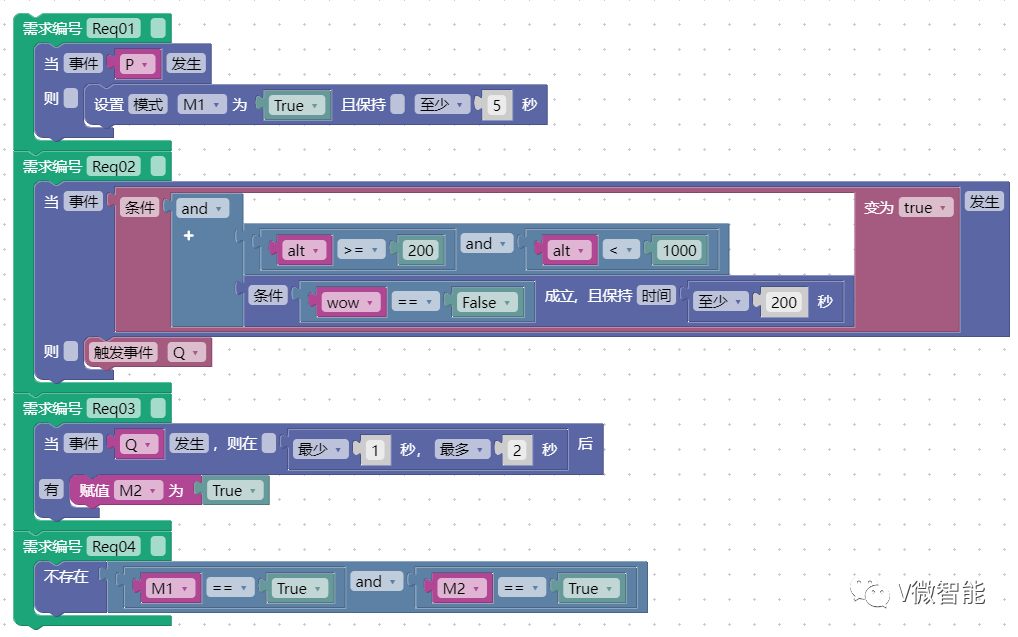
图1 结构化需求图
分析需求之间的依赖关系,获得如下图所示的检查构型。
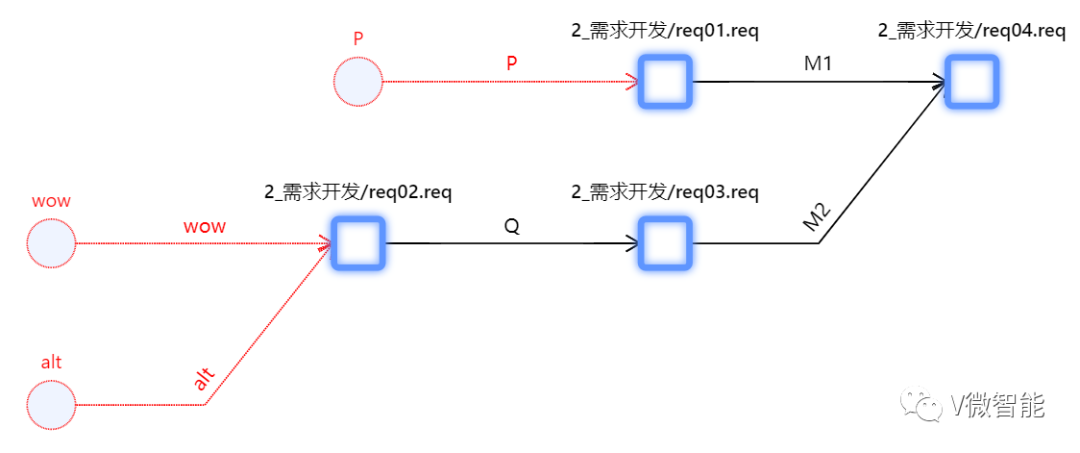
图2 需求关联关系图
4 互斥性检查
对上述结构化需求进行互斥性检查,结果如下。
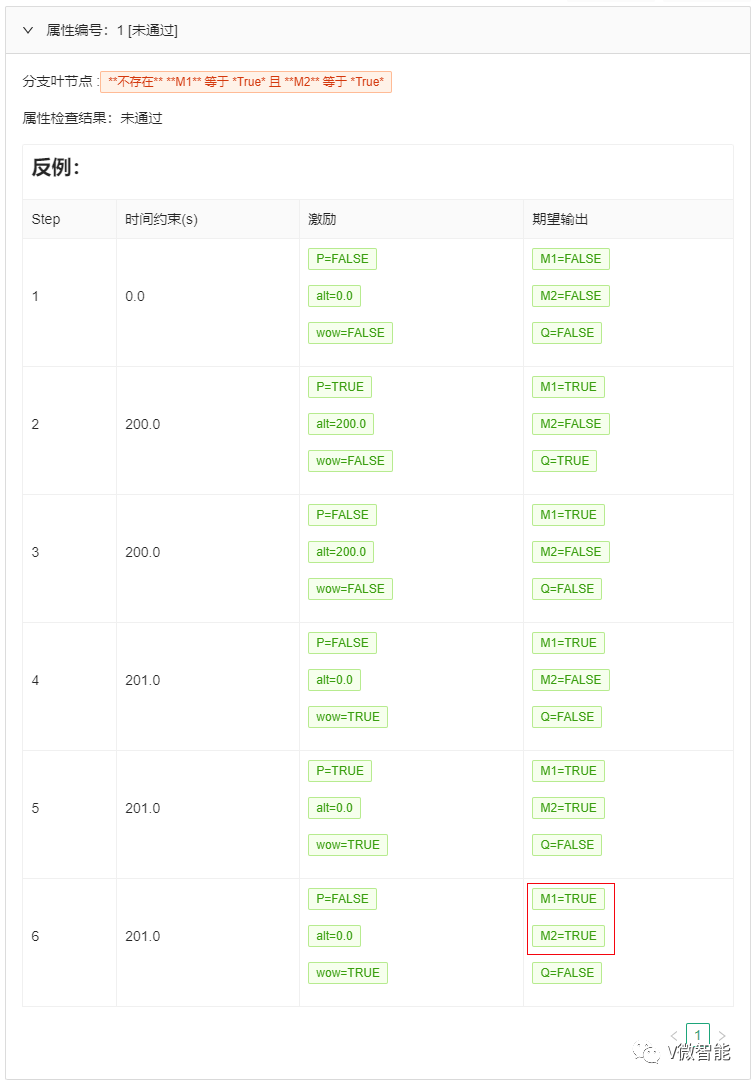
由检查结果可见,模式互斥属性不满足,并给出了一个反例。按照时间约束进行激励信号设置,即可到达目标状态。
在这种耦合了时序关系的需求逻辑中,要通过人工检查发现存在的缺陷是非常伤脑筋的事。这种活应该交给机器去干。
5 飞行阶段互斥性检查

飞行阶段(Flight phase)是飞机状态的一部分,对许多机载应用至关重要。基本飞行阶段包括滑行、起飞、巡航、进近、着陆等,根据具体应用不同会进一步扩展或细分。
飞行阶段基于飞机内部数据,依据设计的逻辑进行计算。飞行阶段应满足互斥性。
按照本文所示方式对飞行阶段判定逻辑进行结构化,即可进行互斥性检查。飞行阶段的计算逻辑显然相比本文实例要复杂的多,但是检查模式是一致的。这恰恰体现了机器自动检查的优点。在检查能力范围内,自动化检查能够更好的适应逻辑复杂性的增加,并且能够对给定属性进行完全、彻底的检查。
6 总结
本文给出了一个模式互斥性检查的实例。对于复杂需求,相比于人工审查,自动化需求检查能够更有效的在逻辑迷雾中发现隐藏的缺陷。















 337
337











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









