







 研究采用非线性干扰观测器增强直升机滑模反演控制,通过Matlab/Simulink建模并仿真,结果显示该策略能有效实现稳定控制和抗干扰,提升直升机控制性能。
研究采用非线性干扰观测器增强直升机滑模反演控制,通过Matlab/Simulink建模并仿真,结果显示该策略能有效实现稳定控制和抗干扰,提升直升机控制性能。
基于非线性干扰观测器的直升机滑模反演控制,期刊simulink模型复现
ID:6949645852209108
P17696131442
基于非线性干扰观测器的直升机滑模反演控制,期刊Simulink模型复现
摘要:
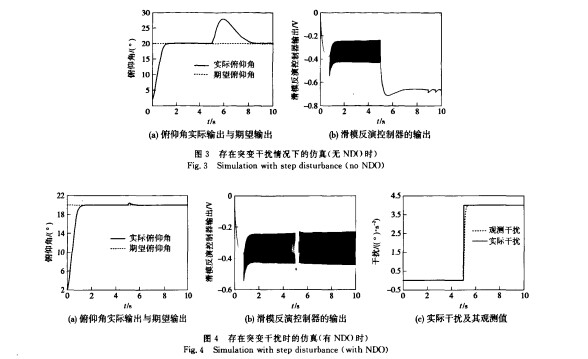
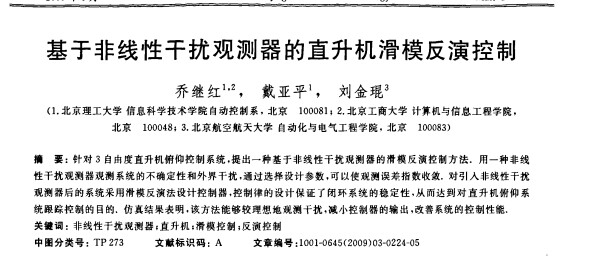
直升机滑模反演控制是一种常用的控制策略,能够有效地实现直升机的稳定控制和轨迹跟踪。为了验证这种控制策略的有效性,本研究采用非线性干扰观测器辅助直升机滑模反演控制。通过在Matlab/Simulink环境下建立直升机模型,并进行仿真实验,验证该控制策略在直升机控制中的应用效果。
引言:
直升机作为一种重要的飞行器,广泛应用于军事、民用和科研领域。然而,由于直升机的非线性和强耦合特性,其控制问题一直是研究的热点之一。滑模控制作为一种有效的控制方法,被广泛用于直升机的姿态控制和飞行轨迹跟踪。
方法:
本研究采用非线性干扰观测器辅助直升机滑模反演控制。首先,建立直升机的数学模型,包括飞行动力学方程和控制方程。然后,
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









