







图为G(V,E)。 V代表点集,E代表边集。n为点的个数,m为边的个数。
下面代码基于这个图:
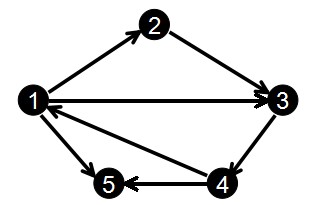
五个点七条边。
输入边的顺序为:
起点,终点,边权
1 2 1
2 3 2
3 4 3
1 3 4
4 1 5
1 5 6
4 5 7
图片和数据来自:深度理解链式前向星
邻接矩阵:
对于邻接矩阵来说,初始化所有边权为极大值INF,需要


优点:可以直接查询到是否有边,如果有边权为多少。
缺点:空间开销大,遍历速度慢。
一般用于稠密图,或顶点较少的图。
#include<bits/stdc++.h>
using namespace std;
const int MAXN = 1005;//点数最大值
const int MAXM = 1005;//边数最大值
const int INF = 0x3f3f3f3f;
int n, m;//n个点,m条边
int G[MAXN][MAXN];//G[i][j] = w;表示i到j有一条边权为w的边
int main()
{
cin >> n >> m;
int from, to, w;
memset(G, INF, sizeof(G));
for (int i = 1; i <= m; i++)
{
cin >> from >> to >> w;
G[from][to] = w;
}
for (int i = 1; i <= n; i++)
{
cout << i << endl;
for (int j = 1; j <= n; j++)
{
if (G[i][j] != INF) cout << i << " " << j << " " << G[i][j] << endl;
}
cout << endl;
}
return 0;
}
/*
5 7
1 2 1
2 3 2
3 4 3
1 3 4
4 1 5
1 5 6
4 5 7
*/
前向星
因为需要对边集数组排序,一般情况下时间复杂度为

优点:可以应对点非常多的情况,可以存储重边。
缺点:判断两个顶点

#include<bits/stdc++.h>
using namespace std;
const int MAXN = 1005;//点数最大值
const int MAXM = 1005;//边数最大值
int n, m;//n个点,m条边
struct Edge
{
int from ,to, w;//起点,终点,边权
bool operator < (const Edge& a) const
{
if(from != a.from) return from < a.from;
if(to != a.to) return to < a.to;
return w < a.w;
}
}edge[MAXM];//边集
int head[MAXN];//head[i],表示以i为起点的第一条边在边集数组的位置
int main()
{
cin >> n >> m;
int from;
for (int i = 1; i <= m; i++)//输入m条边
{
cin >> edge[i].from >> edge[i].to >> edge[i].w;//加边
}
sort(edge, edge + m);//以起点升序排序
memset(head, -1, sizeof(head));//初始化
head[edge[1].from] = 1;
for (int i = 2; i <= m; i++)//确定head[i],表示以i为起点的第一条边在边集数组的位置
{
if(edge[i].from != edge[i - 1].from) head[edge[i].from] = i;
}
for (int i = 1; i <= n; i++)//n个起点
{
cout << i << endl;
for (int j = head[i]; edge[j].from == i && j <= m; j++)//遍历以i为起点的边
{
cout << edge[j].from << " " << edge[j].to << " " << edge[j].w << endl;
}
cout << endl;
}
return 0;
}
/*
5 7
1 2 1
2 3 2
3 4 3
1 3 4
4 1 5
1 5 6
4 5 7
*/
邻接表:
①动态建表:
动态建立的邻接表,时间效率为O(m),空间效率也为O(m)。遍历效率也为O(m)。
优点:时间效率和空间效率都比较高。
缺点:需要随着加边申请内存,直接判断两个顶点
由于代码不太好写,所以比赛中用的较少。
#include<bits/stdc++.h>
using namespace std;
const int MAXN = 1005;//点数最大值
const int MAXM = 1005;//边数最大值
const int INF = 0x3f3f3f3f;
int n, m;//n个点,m条边
struct EdgeNode//邻接表节点
{
int to, w;//终点,边权
EdgeNode *Next;//指向下一条边的指针
};
struct VNode//起点表节点
{
int from;//起点
EdgeNode *first;//邻接表头指针
};
VNode head[MAXN];//整个图的邻接表(头指针)
void add_edge(int from, int to, int w)
{
EdgeNode *p = new EdgeNode;
p->to = to;
p->w = w;
p->Next = head[from].first;
head[from].first = p;
}
int main()
{
cin >> n >> m;
int from, to, w;
for (int i = 1; i <= m; i++)
{
cin >> from >> to >> w;
add_edge(from, to, w);//加边
}
for (int i = 1; i <= n; i++)
{
cout << i << endl;
for (EdgeNode *j = head[i].first; j != nullptr; j = j->Next)
{
cout << i << " " << j->to << " " << j->w << endl;
}
cout << endl;
}
return 0;
}
/*
5 7
1 2 1
2 3 2
3 4 3
1 3 4
4 1 5
1 5 6
4 5 7
*/②vector实现邻接表:
复杂度和邻接表基本一样。代码少不容易犯错误,内存的申请和释放都不需要自己处理。
#include<bits/stdc++.h>
using namespace std;
const int MAXN = 1005;//点数最大值
const int MAXM = 1005;//边数最大值
int n, m;//n个点,m条边
struct Edge
{
int to, w;//终点,边权
}e;
vector<Edge> edge[MAXM];//edge[i],表示以i为起点的边集
int main()
{
cin >> n >> m;
int from;
for (int i = 1; i <= m; i++)//输入m条边
{
cin >> from >> e.to >> e.w;
edge[from].push_back(e);//加边
}
for (int i = 1; i <= n; i++)//n个起点
{
cout << i << endl;
for (auto j: edge[i])//遍历以i为起点的边
{
cout << i << " " << j.to << " " << j.w << endl;
}
cout << endl;
}
return 0;
}
/*
5 7
1 2 1
2 3 2
3 4 3
1 3 4
4 1 5
1 5 6
4 5 7
*/
③链式前向星:
链式前向星其实就是静态建立的邻接表,时间效率为O(m),空间效率也为O(m)。遍历效率也为O(m)。
优点:时间效率和空间效率高。
缺点:直接判断两个顶点
因为是一次性申请内存,所以比邻接表实时申请快一些。
可以说是目前建立图和遍历效率最高的存储方式。比赛中常用。
#include<bits/stdc++.h>
using namespace std;
const int MAXN = 1005;//点数最大值
const int MAXM = 1005;//边数最大值
int n, m;//n个点,m条边
struct Edge
{
int to, w, Next;//终点,边权,同起点的上一条边的编号
}edge[MAXM + 5];//边集
int head[MAXN + 5];//head[i],表示以i为起点的第一条边在边集数组的位置(编号)
void init()//初始化
{
for (int i = 0; i <= n; i++) head[i] = -1;
}
void add_edge(int u, int v, int w, int i)//加边,u起点,v终点,w边权,i为边的编号
{
edge[i].to = v;
edge[i].w = w;
edge[i].Next = head[u];//以u为起点上一条边的编号
head[u] = i;//更新以u为起点上一条边的编号
}
int main()
{
cin >> n >> m;
int u, v, w;
init();//初始化
for (int i = 1; i <= m; i++)//输入m条边
{
cin >> u >> v >> w;
add_edge(u, v, w, i);//加边
/*
加双向边
add_edge(u, v, w, i * 2);
add_edge(v, u, w, i * 2 + 1);
*/
}
for (int i = 1; i <= n; i++)//n个起点
{
cout << i << endl;
for (int j = head[i]; j != -1; j = edge[j].Next)//遍历以i为起点的边
{
cout << i << " " << edge[j].to << " " << edge[j].w << endl;
}
cout << endl;
}
return 0;
}
/*
5 7
1 2 1
2 3 2
3 4 3
1 3 4
4 1 5
1 5 6
4 5 7
*/
















 2745
2745

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









