









ARM汇编
宗旨:技术的学习是有限的,分享的精神是无限的。
1、寄存器组
ARM 处理器一般共有37个寄存器,其中包括:
(1)31 个通用寄存器,包括PC(程序计数器)在内,都是32位的寄存器。
(2) 6 个状态寄存器,都是 32 位的寄存器。
ARM处理器的工作模式:用户模式(User),快速中断模式(FIQ),外部中断模式(IRQ),特权模式(Supervisor),数据访问终止模式(Abort),未定义指令中止模式(Undef),系统模式(System)
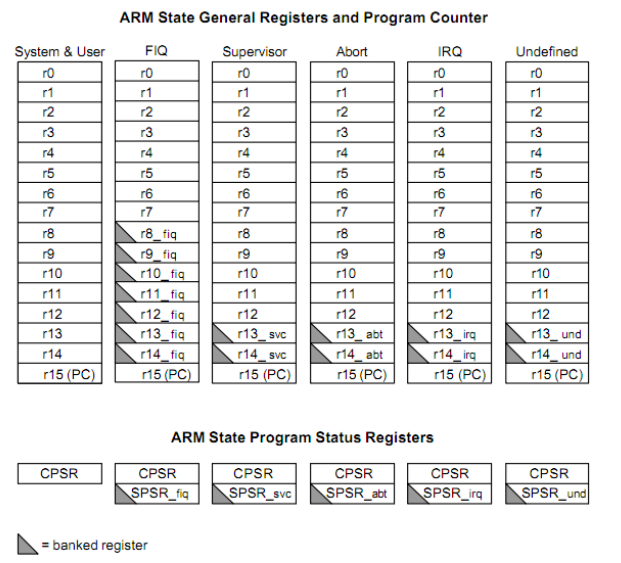
其中r0~r3主要用于子程序间传递参数,r4~r11主要用于保存局部变量,但在Thumb 程序中,通常只能使用 r4~r7 来保存局部变量;r12 用作子程序间 scratch 寄存器,即 ip 寄存器;r13 通常用做栈指针,即sp; r14 寄存器又被称为连接寄存器(lr),用于保存子程序的返回地址; r15 用作程序计数器(pc), 由于 ARM 采用了流水线机制,当正确读取了 PC 的值后,该值为当前指令地址加 8 个字节,即 PC 指向当前指令的下两条指令地址。
2、ARM寻址方式
2.1、立即寻址
ADD R0, R0, #0x3f ; R0<- R0 + 0x3f(大写小写都是一样的)
第二个源操作数为立即数,要求以“#”为前缀,对于十六进制数需在紧跟“#”后加上“ 0x”。汇编中,“;”表示注释。
2.2、寄存器寻址
ADDR0,R1, R2;将寄存器 R1 和 R2 存放的内容相加存放到R0 中
2.3、寄存器间接寻址
ldr r0, [r1] ; 将 R1 的值作为地址,取出存储器中的数据传送到 R0 中
str r0, [r1] ; 将 R0 的数据存储到R1的值为地址的存储器里面
2.4、多寄存器寻址
LDMIA R0,{R1,R2,R3,R4} ; R1 <-[R0],R2 <- [R0 + 4],
; R3 <- [R0 +8], R3 <- [R0 + 12]
3、ARM指令集
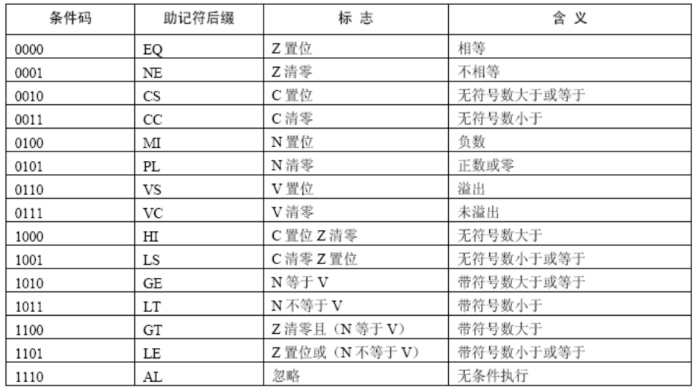
3.1、ARM指令的条件码表
3.2、常用指令集
mov 把值存入寄存器(MOV PC, R14; 退出到调用者)
mvn 取反 (MVN R0, #4 ; R0 = -5)
sub 减法操作(SUB R0, R1, R2;R0 = R1 - R2)
add 加法操作( ADD R0, R1, R2;R0 = R1 + R2)
and 逻辑与(AND R0, R0, #3;R0 = 保持 R0 的位 0 和 1,丢弃其余的位。)
bic 是在一个字中清除位的一种方法 (BIC R0, R0, #%1011 ; 清除 R0 中的位 0、1、和 3。保持其余的不变。)
cmp 比较
b 一旦遇到一个 B 指令,ARM 处理器将立即跳转到给定的地址,从那里继续执行
bl 就在分支之前,在寄存器 14 中装载上 R15 的内容
lsl 逻辑或者算算左移 (MOV R1, #12 MOV R0, R1, LSL#2)
ror 循环右移
msr 搬回 (MSR CPSR, R0;复制 R0 到 CPSR 中)
mrs 搬出 (MRS R0, CPSR ;复制 CPSR 到 R0 中)
ldr 使用单一数据传送指令(STR 和 LDR)来装载和存储单一字节或字的数据从/到内存
str 寄存器内容保存到内存 ldr把内存的数据读到寄存器















 3253
3253











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









