






改进yolo11-AFPN-P345等200+全套创新点大全:超市货架空缺检测系统源码&数据集全套
1.图片效果展示



项目来源 人工智能促进会 2024.10.28
注意:由于项目一直在更新迭代,上面“1.图片效果展示”和“2.视频效果展示”展示的系统图片或者视频可能为老版本,新版本在老版本的基础上升级如下:(实际效果以升级的新版本为准)
(1)适配了YOLOV11的“目标检测”模型和“实例分割”模型,通过加载相应的权重(.pt)文件即可自适应加载模型。
(2)支持“图片识别”、“视频识别”、“摄像头实时识别”三种识别模式。
(3)支持“图片识别”、“视频识别”、“摄像头实时识别”三种识别结果保存导出,解决手动导出(容易卡顿出现爆内存)存在的问题,识别完自动保存结果并导出到tempDir中。
(4)支持Web前端系统中的标题、背景图等自定义修改。
另外本项目提供训练的数据集和训练教程,暂不提供权重文件(best.pt),需要您按照教程进行训练后实现图片演示和Web前端界面演示的效果。
2.视频效果展示
3.背景
研究背景与意义
随着零售行业的快速发展,超市作为重要的消费场所,其货架管理的有效性直接影响到顾客的购物体验和超市的销售业绩。货架空缺问题,尤其是缺货现象,不仅导致顾客无法找到所需商品,还可能使顾客转向竞争对手,从而造成经济损失。因此,及时、准确地检测超市货架上的空缺情况,成为提升超市运营效率和顾客满意度的重要环节。
近年来,计算机视觉技术的迅猛发展为货架空缺检测提供了新的解决方案。YOLO(You Only Look Once)系列模型因其高效的实时目标检测能力,已被广泛应用于各类视觉识别任务。特别是YOLOv11模型,凭借其在精度和速度上的优势,成为了货架空缺检测的理想选择。然而,传统YOLO模型在处理特定场景下的货架空缺检测时,仍存在一定的局限性,如对空缺区域的识别精度不足、背景干扰等问题。因此,基于改进YOLOv11的超市货架空缺检测系统的研究显得尤为重要。
本项目将利用包含1400张图像的“超市货架空缺”数据集,专注于识别货架上缺失的商品。该数据集的单一类别“缺失商品”将为模型的训练提供清晰的目标,使其能够更好地学习和识别货架空缺的特征。通过对YOLOv11模型的改进,结合深度学习技术,我们期望提升检测的准确性和实时性,从而为超市管理者提供有效的决策支持。这不仅有助于优化货架管理,提高商品周转率,还能提升顾客的购物体验,最终推动超市的整体业绩增长。因此,本研究具有重要的理论价值和实际应用意义。
4.数据集信息展示
4.1 本项目数据集详细数据(类别数&类别名)
nc: 3
names: [‘-’, ‘missing’, ‘product’]
该项目为【目标检测】数据集,请在【训练教程和Web端加载模型教程(第三步)】这一步的时候按照【目标检测】部分的教程来训练
4.2 本项目数据集信息介绍
本项目数据集信息介绍
本项目所使用的数据集名为“Empty spaces in a supermarket hanger”,旨在为改进YOLOv11的超市货架空缺检测系统提供支持。该数据集专注于超市货架的空缺情况,特别是通过图像识别技术来检测货架上缺失的商品。数据集中包含三种主要类别,分别为“缺失”(missing)、“产品”(product)和“空白”(-),这三类标签能够有效地帮助模型识别和分类货架上的状态。
在数据集的构建过程中,研究团队收集了大量超市货架的图像,涵盖了不同类型的商品和货架布局。这些图像不仅展示了正常情况下货架的商品排列,还特别标注了空缺的区域,确保模型能够准确学习到何时货架上存在缺失商品的情况。通过这种方式,数据集不仅丰富了训练样本的多样性,还增强了模型对实际超市环境的适应能力。
数据集的设计考虑到了现实世界中超市货架的复杂性,包括不同的照明条件、货架高度和商品种类等因素。这些多样化的场景为YOLOv11模型的训练提供了丰富的上下文信息,使其在实际应用中能够更好地识别和处理货架空缺问题。此外,数据集的标签系统清晰明了,能够有效地指导模型学习如何区分正常商品与缺失商品,从而提高检测的准确性和效率。
总之,“Empty spaces in a supermarket hanger”数据集为本项目提供了坚实的基础,助力于开发出更为智能和高效的超市货架空缺检测系统,以应对日益增长的零售行业需求。通过充分利用这一数据集,研究团队期望能够实现更高的检测精度和更快的响应速度,为超市管理提供有力的技术支持。




![
5.全套项目环境部署视频教程(零基础手把手教学)
5.1 所需软件PyCharm和Anaconda安装教程(第一步)
5.2 安装Python虚拟环境创建和依赖库安装视频教程(第二步)
6.改进YOLOv11训练教程和Web_UI前端加载模型教程(零基础手把手教学)
6.1 改进YOLOv11训练教程和Web_UI前端加载模型教程(第三步)
按照上面的训练视频教程链接加载项目提供的数据集,运行train.py即可开始训练
Epoch gpu_mem box obj cls labels img_size
1/200 20.8G 0.01576 0.01955 0.007536 22 1280: 100%|██████████| 849/849 [14:42<00:00, 1.04s/it]
Class Images Labels P R mAP@.5 mAP@.5:.95: 100%|██████████| 213/213 [01:14<00:00, 2.87it/s]
all 3395 17314 0.994 0.957 0.0957 0.0843
Epoch gpu_mem box obj cls labels img_size
2/200 20.8G 0.01578 0.01923 0.007006 22 1280: 100%|██████████| 849/849 [14:44<00:00, 1.04s/it]
Class Images Labels P R mAP@.5 mAP@.5:.95: 100%|██████████| 213/213 [01:12<00:00, 2.95it/s]
all 3395 17314 0.996 0.956 0.0957 0.0845
Epoch gpu_mem box obj cls labels img_size
3/200 20.8G 0.01561 0.0191 0.006895 27 1280: 100%|██████████| 849/849 [10:56<00:00, 1.29it/s]
Class Images Labels P R mAP@.5 mAP@.5:.95: 100%|███████ | 187/213 [00:52<00:00, 4.04it/s]
all 3395 17314 0.996 0.957 0.0957 0.0845
项目数据集下载链接
7.原始YOLOv11算法讲解
YOLO11介绍
Ultralytics YOLO11是一款尖端的、最先进的模型,它在之前YOLO版本成功的基础上进行了构建,并引入了新功能和改进,以进一步提升性能和灵活性。
YOLO11设计快速、准确且易于使用,使其成为各种物体检测和跟踪、实例分割、图像分类以及姿态估计任务的绝佳选择。


结构图如下:

C3k2
C3k2,结构图如下

**C3k2,继承自类C2f,其中通过c3k设置False或者Ture来决定选择使用C3k还是**Bottleneck

实现代码 ultralytics/nn/modules/block.py
C2PSA介绍
借鉴V10 PSA结构,实现了C2PSA和C2fPSA,最终选择了基于C2的C2PSA(可能涨点更好?)

实现代码 ultralytics/nn/modules/block.py
Detect介绍
分类检测头引入了DWConv(更加轻量级,为后续二次创新提供了改进点),结构图如下(和V8的区别):

8.200+种全套改进YOLOV11创新点原理讲解
8.1 200+种全套改进YOLOV11创新点原理讲解大全
由于篇幅限制,每个创新点的具体原理讲解就不全部展开,具体见下列网址中的改进模块对应项目的技术原理博客网址【Blog】(创新点均为模块化搭建,原理适配YOLOv5~YOLOv11等各种版本)

8.2 精选部分改进YOLOV11创新点原理讲解
这里节选部分改进创新点展开原理讲解(完整的改进原理见上图和改进模块技术原理博客链接【如果此小节的图加载失败可以通过CSDN或者Github搜索该博客的标题访问原始博客,原始博客图片显示正常】
Gold-YOLO
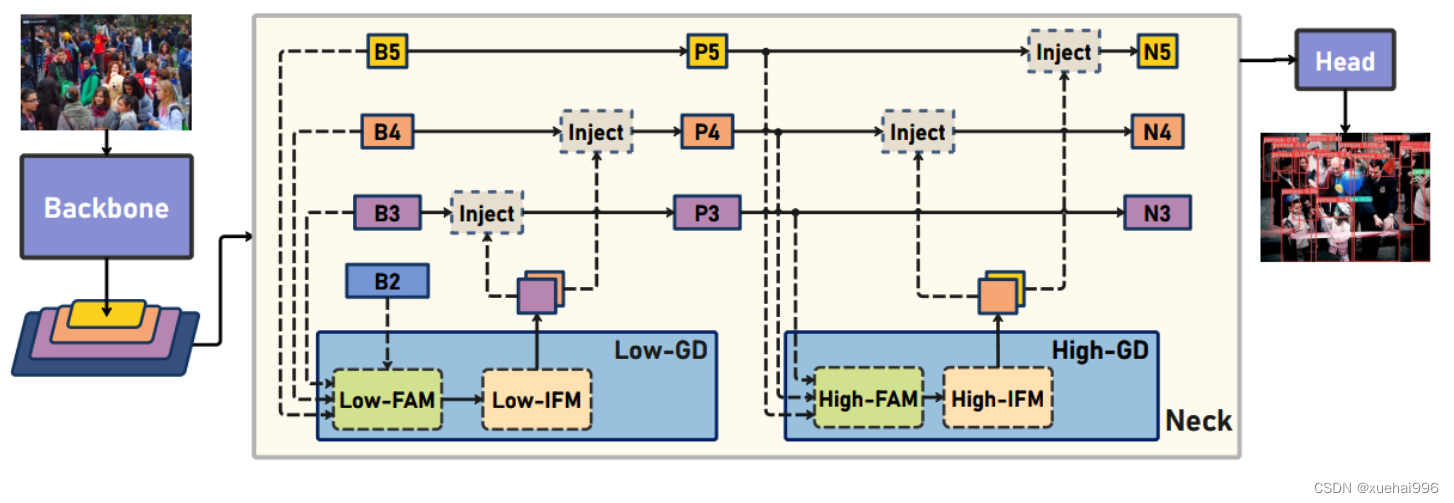
Preliminaries
YOLO系列的中间层结构采用了传统的FPN结构,其中包含多个分支用于多尺度特征融合。然而,它只充分融合来自相邻级别的特征,对于其他层次的信息只能间接地进行“递归”获取。
传统的FPN结构在信息传输过程中存在丢失大量信息的问题。这是因为层之间的信息交互仅限于中间层选择的信息,未被选择的信息在传输过程中被丢弃。这种情况导致某个Level的信息只能充分辅助相邻层,而对其他全局层的帮助较弱。因此,整体上信息融合的有效性可能受到限制。
为了避免在传输过程中丢失信息,本文采用了一种新颖的“聚集和分发”机制(GD),放弃了原始的递归方法。该机制使用一个统一的模块来收集和融合所有Level的信息,并将其分发到不同的Level。通过这种方式,作者不仅避免了传统FPN结构固有的信息丢失问题,还增强了中间层的部分信息融合能力,而且并没有显著增加延迟。

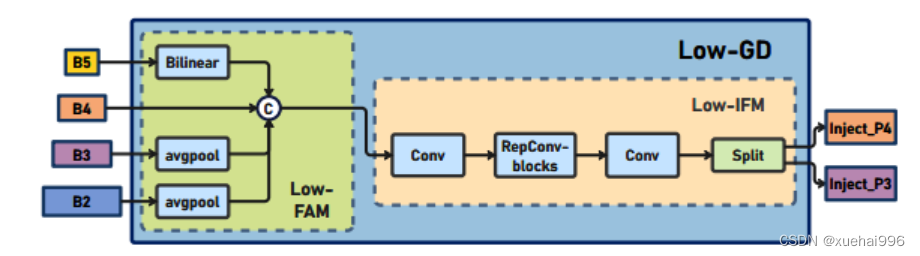
低阶聚合和分发分支 Low-stage gather-and-distribute branch
从主干网络中选择输出的B2、B3、B4、B5特征进行融合,以获取保留小目标信息的高分辨率特征。
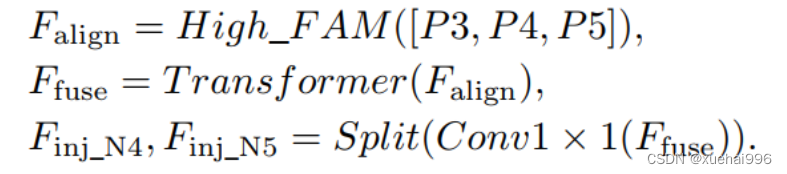
高阶聚合和分发分支 High-stage gather-and-distribute branch
高级全局特征对齐模块(High-GD)将由低级全局特征对齐模块(Low-GD)生成的特征{P3, P4, P5}进行融合。
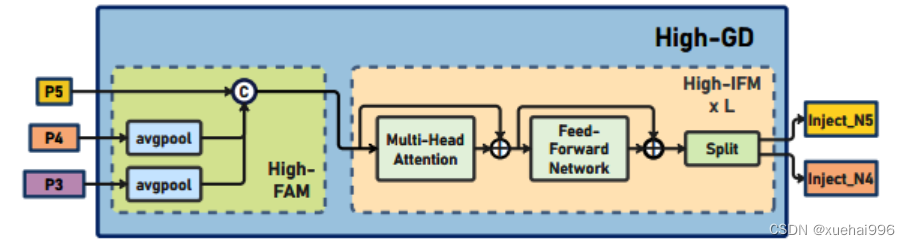
Transformer融合模块由多个堆叠的transformer组成,transformer块的数量为L。每个transformer块包括一个多头注意力块、一个前馈网络(FFN)和残差连接。采用与LeViT相同的设置来配置多头注意力块,使用16个通道作为键K和查询Q的头维度,32个通道作为值V的头维度。为了加速推理过程,将层归一化操作替换为批归一化,并将所有的GELU激活函数替换为ReLU。为了增强变换器块的局部连接,在两个1x1卷积层之间添加了一个深度卷积层。同时,将FFN的扩展因子设置为2,以在速度和计算成本之间取得平衡。
信息注入模块(Information injection module): 高级全局特征对齐模块(High-GD)中的信息注入模块与低级全局特征对齐模块(Low-GD)中的相同。在高级阶段,局部特征(Flocal)等于Pi,因此公式如下所示:

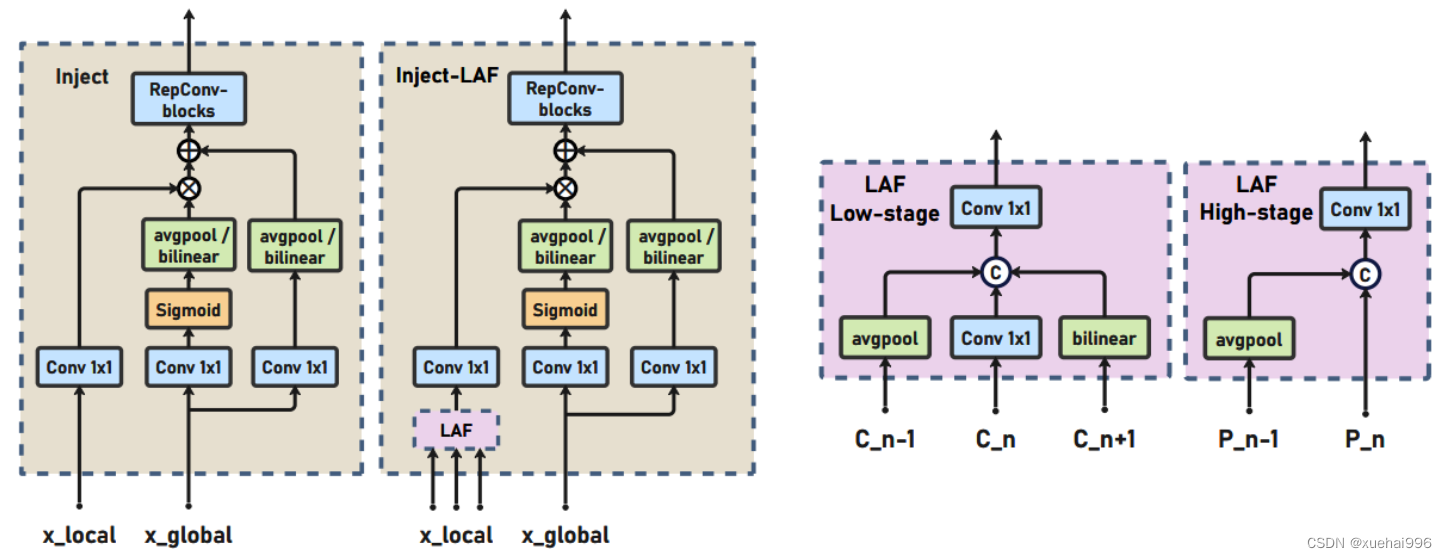
增强的跨层信息流动 Enhanced cross-layer information flow
为了进一步提升性能,从YOLOv6 中的PAFPN模块中得到启发,引入了Inject-LAF模块。该模块是注入模块的增强版,包括了一个轻量级相邻层融合(LAF)模块,该模块被添加到注入模块的输入位置。为了在速度和准确性之间取得平衡,设计了两个LAF模型:LAF低级模型和LAF高级模型,分别用于低级注入(合并相邻两层的特征)和高级注入(合并相邻一层的特征)。它们的结构如图5(b)所示。为了确保来自不同层级的特征图与目标大小对齐,在实现中的两个LAF模型仅使用了三个操作符:双线性插值(上采样过小的特征)、平均池化(下采样过大的特征)和1x1卷积(调整与目标通道不同的特征)。模型中的LAF模块与信息注入模块的结合有效地平衡了准确性和速度之间的关系。通过使用简化的操作,能够增加不同层级之间的信息流路径数量,从而提高性能而不显著增加延迟。
9.系统功能展示
图9.1.系统支持检测结果表格显示
图9.2.系统支持置信度和IOU阈值手动调节
图9.3.系统支持自定义加载权重文件best.pt(需要你通过步骤5中训练获得)
图9.4.系统支持摄像头实时识别
图9.5.系统支持图片识别
图9.6.系统支持视频识别
图9.7.系统支持识别结果文件自动保存
图9.8.系统支持Excel导出检测结果数据








10. YOLOv11核心改进源码讲解
10.1 CTrans.py
以下是对代码中最核心部分的提炼和详细中文注释:
import torch
import torch.nn as nn
import math
from torch.nn import Dropout, Softmax, LayerNorm
class Channel_Embeddings(nn.Module):
"""构建通道嵌入,包括补丁嵌入和位置嵌入。"""
def __init__(self, patchsize, img_size, in_channels):
super().__init__()
img_size = (img_size, img_size) # 将图像大小转换为元组
patch_size = (patchsize, patchsize) # 将补丁大小转换为元组
n_patches = (img_size[0] // patch_size[0]) * (img_size[1] // patch_size[1]) # 计算补丁数量
# 定义补丁嵌入层
self.patch_embeddings = nn.Sequential(
nn.MaxPool2d(kernel_size=5, stride=5), # 最大池化层
nn.Conv2d(in_channels=in_channels,
out_channels=in_channels,
kernel_size=patchsize // 5,
stride=patchsize // 5) # 卷积层
)
# 定义位置嵌入参数
self.position_embeddings = nn.Parameter(torch.zeros(1, n_patches, in_channels))
self.dropout = Dropout(0.1) # Dropout层,防止过拟合
def forward(self, x):
"""前向传播,计算嵌入。"""
if x is None:
return None
x = self.patch_embeddings(x) # 计算补丁嵌入
x = x.flatten(2) # 展平为 (B, n_patches, hidden)
x = x.transpose(-1, -2) # 转置为 (B, n_patches, hidden)
embeddings = x + self.position_embeddings # 加上位置嵌入
embeddings = self.dropout(embeddings) # 应用Dropout
return embeddings
class Attention_org(nn.Module):
"""自定义的多头注意力机制。"""
def __init__(self, vis, channel_num):
super(Attention_org, self).__init__()
self.vis = vis # 可视化标志
self.KV_size = sum(channel_num) # 键值对的总通道数
self.channel_num = channel_num # 通道数列表
self.num_attention_heads = 4 # 注意力头的数量
# 定义查询、键、值的线性变换
self.query = nn.ModuleList([nn.Linear(c, c, bias=False) for c in channel_num])
self.key = nn.Linear(self.KV_size, self.KV_size, bias=False)
self.value = nn.Linear(self.KV_size, self.KV_size, bias=False)
self.psi = nn.InstanceNorm2d(self.num_attention_heads) # 实例归一化
self.softmax = Softmax(dim=3) # Softmax层
self.attn_dropout = Dropout(0.1) # 注意力的Dropout
self.proj_dropout = Dropout(0.1) # 投影的Dropout
def forward(self, *embeddings):
"""前向传播,计算注意力输出。"""
multi_head_Q = [query(emb) for query, emb in zip(self.query, embeddings) if emb is not None]
multi_head_K = self.key(torch.cat(embeddings, dim=2)) # 合并所有嵌入并计算键
multi_head_V = self.value(torch.cat(embeddings, dim=2)) # 合并所有嵌入并计算值
# 计算注意力分数
attention_scores = [torch.matmul(Q, multi_head_K) / math.sqrt(self.KV_size) for Q in multi_head_Q]
attention_probs = [self.softmax(self.psi(score)) for score in attention_scores] # 计算注意力概率
# 应用Dropout
attention_probs = [self.attn_dropout(prob) for prob in attention_probs]
context_layers = [torch.matmul(prob, multi_head_V) for prob in attention_probs] # 计算上下文层
# 线性变换输出
outputs = [query(context) for query, context in zip(self.query, context_layers)]
return outputs
class ChannelTransformer(nn.Module):
"""通道变换器模型。"""
def __init__(self, channel_num=[64, 128, 256, 512], img_size=640, vis=False, patchSize=[40, 20, 10, 5]):
super().__init__()
self.embeddings = nn.ModuleList([Channel_Embeddings(patch, img_size // (2 ** i), channels)
for i, (patch, channels) in enumerate(zip(patchSize, channel_num))])
self.encoder = Encoder(vis, channel_num) # 编码器
self.reconstruct = nn.ModuleList([Reconstruct(channels, channels, kernel_size=1, scale_factor=(patch, patch))
for patch, channels in zip(patchSize, channel_num)])
def forward(self, en):
"""前向传播,计算最终输出。"""
embeddings = [embed(en[i]) for i, embed in enumerate(self.embeddings) if en[i] is not None]
encoded = self.encoder(*embeddings) # 编码嵌入
reconstructed = [recon(enc) + en[i] for i, (recon, enc) in enumerate(zip(self.reconstruct, encoded)) if en[i] is not None]
return reconstructed
代码核心部分分析:
- Channel_Embeddings: 负责将输入图像转换为补丁嵌入和位置嵌入,使用卷积和最大池化层来提取特征。
- Attention_org: 实现了多头注意力机制,计算输入嵌入之间的注意力分数,并生成上下文向量。
- ChannelTransformer: 整合了通道嵌入、编码器和重建模块,构成了整个变换器模型的核心结构。
注释说明:
- 每个类和方法都添加了详细的中文注释,解释其功能和实现细节,帮助理解代码的结构和逻辑。
这个文件定义了一个名为 CTrans.py 的深度学习模型,主要用于图像处理任务,尤其是基于通道的变换器(Channel Transformer)。模型的设计灵感来自于视觉变换器(Vision Transformer),并通过多种模块来实现图像的特征提取和重建。
首先,文件中引入了一些必要的库,包括 torch 和 torch.nn,这些库提供了构建神经网络所需的基本组件。接下来,定义了几个类,每个类负责模型的不同部分。
Channel_Embeddings 类用于构建图像的嵌入表示。它通过卷积和池化操作将输入图像划分为多个小块(patch),并为每个小块生成位置嵌入。这个类的 forward 方法负责将输入图像转换为嵌入表示,并应用位置嵌入和 dropout 操作。
Reconstruct 类用于将嵌入表示重建为图像。它通过卷积和上采样操作将嵌入转换回图像的空间维度,并应用批归一化和激活函数。
Attention_org 类实现了多头注意力机制。它通过对输入的嵌入进行线性变换,计算注意力分数,并生成上下文层。这个类的设计允许对多个通道的嵌入进行并行处理,并在计算注意力时考虑所有通道的信息。
Mlp 类实现了一个简单的多层感知机(MLP),用于对嵌入进行非线性变换。它包含两个全连接层和一个激活函数(GELU),并在前向传播中应用 dropout。
Block_ViT 类结合了注意力机制和多层感知机,形成一个完整的变换器块。它首先对输入的嵌入进行层归一化,然后通过注意力机制进行处理,最后通过 MLP 进行非线性变换。这个类的设计使得它能够处理多个通道的嵌入,并在每个通道上应用相同的操作。
Encoder 类是一个由多个 Block_ViT 组成的编码器。它负责对输入的嵌入进行多次变换,并输出经过处理的嵌入。每个变换块的输出都经过层归一化,以确保模型的稳定性。
ChannelTransformer 类是整个模型的核心。它初始化了多个嵌入层、编码器和重建层。模型的前向传播过程包括将输入图像转换为嵌入,经过编码器处理后再重建为图像。这个类的设计使得模型能够处理不同大小的图像和通道。
最后,GetIndexOutput 类用于从模型的输出中提取特定的索引。这在需要从多个输出中选择特定结果时非常有用。
整体来看,这个文件实现了一个复杂的图像处理模型,利用了深度学习中的多种技术,如卷积、注意力机制和多层感知机,旨在有效地提取和重建图像特征。
10.2 val.py
以下是代码中最核心的部分,并附上详细的中文注释:
class DetectionValidator(BaseValidator):
"""
扩展自 BaseValidator 类的检测模型验证器。
"""
def __init__(self, dataloader=None, save_dir=None, pbar=None, args=None, _callbacks=None):
"""初始化检测模型,设置必要的变量和参数。"""
super().__init__(dataloader, save_dir, pbar, args, _callbacks)
self.nt_per_class = None # 每个类别的目标数量
self.is_coco = False # 是否为 COCO 数据集
self.class_map = None # 类别映射
self.args.task = "detect" # 任务类型设置为检测
self.metrics = DetMetrics(save_dir=self.save_dir, on_plot=self.on_plot) # 初始化检测指标
self.iouv = torch.linspace(0.5, 0.95, 10) # mAP@0.5:0.95 的 IoU 向量
self.niou = self.iouv.numel() # IoU 的数量
self.lb = [] # 用于自动标注
def preprocess(self, batch):
"""对图像批次进行预处理,以便用于 YOLO 训练。"""
batch["img"] = batch["img"].to(self.device, non_blocking=True) # 将图像移动到设备上
batch["img"] = (batch["img"].half() if self.args.half else batch["img"].float()) / 255 # 归一化图像
for k in ["batch_idx", "cls", "bboxes"]:
batch[k] = batch[k].to(self.device) # 将其他数据移动到设备上
# 如果需要保存混合数据
if self.args.save_hybrid:
height, width = batch["img"].shape[2:] # 获取图像的高度和宽度
nb = len(batch["img"]) # 批次中图像的数量
bboxes = batch["bboxes"] * torch.tensor((width, height, width, height), device=self.device) # 计算边界框
self.lb = (
[
torch.cat([batch["cls"][batch["batch_idx"] == i], bboxes[batch["batch_idx"] == i]], dim=-1)
for i in range(nb)
]
if self.args.save_hybrid
else []
) # 为自动标注准备数据
return batch # 返回处理后的批次
def postprocess(self, preds):
"""对预测输出应用非极大值抑制。"""
return ops.non_max_suppression(
preds,
self.args.conf, # 置信度阈值
self.args.iou, # IoU 阈值
labels=self.lb, # 标签
multi_label=True, # 多标签
agnostic=self.args.single_cls, # 是否单类
max_det=self.args.max_det, # 最大检测数量
)
def update_metrics(self, preds, batch):
"""更新检测指标。"""
for si, pred in enumerate(preds): # 遍历每个预测
self.seen += 1 # 更新已处理的样本数量
npr = len(pred) # 当前预测的数量
stat = dict(
conf=torch.zeros(0, device=self.device), # 置信度
pred_cls=torch.zeros(0, device=self.device), # 预测类别
tp=torch.zeros(npr, self.niou, dtype=torch.bool, device=self.device), # 真阳性
)
pbatch = self._prepare_batch(si, batch) # 准备当前批次的数据
cls, bbox = pbatch.pop("cls"), pbatch.pop("bbox") # 获取类别和边界框
nl = len(cls) # 目标数量
stat["target_cls"] = cls # 记录目标类别
if npr == 0: # 如果没有预测
if nl: # 如果有目标
for k in self.stats.keys():
self.stats[k].append(stat[k]) # 更新统计数据
continue # 跳过当前循环
# 处理预测
if self.args.single_cls:
pred[:, 5] = 0 # 如果是单类,将类别设置为 0
predn = self._prepare_pred(pred, pbatch) # 准备预测数据
stat["conf"] = predn[:, 4] # 记录置信度
stat["pred_cls"] = predn[:, 5] # 记录预测类别
# 评估
if nl: # 如果有目标
stat["tp"] = self._process_batch(predn, bbox, cls) # 处理当前批次
for k in self.stats.keys():
self.stats[k].append(stat[k]) # 更新统计数据
# 保存预测结果
if self.args.save_json:
self.pred_to_json(predn, batch["im_file"][si]) # 保存为 JSON 格式
if self.args.save_txt:
file = self.save_dir / "labels" / f'{Path(batch["im_file"][si]).stem}.txt' # 保存为 TXT 格式
self.save_one_txt(predn, self.args.save_conf, pbatch["ori_shape"], file)
def get_stats(self):
"""返回指标统计和结果字典。"""
stats = {k: torch.cat(v, 0).cpu().numpy() for k, v in self.stats.items()} # 转换为 numpy 数组
if len(stats) and stats["tp"].any(): # 如果有真阳性
self.metrics.process(**stats) # 处理指标
self.nt_per_class = np.bincount(
stats["target_cls"].astype(int), minlength=self.nc
) # 计算每个类别的目标数量
return self.metrics.results_dict # 返回结果字典
代码核心部分说明:
- DetectionValidator 类:用于扩展基本验证器,专门处理目标检测任务。
- 初始化方法:设置必要的参数和指标,准备进行验证。
- 预处理方法:对输入的图像批次进行归一化和设备转移,为后续处理做准备。
- 后处理方法:应用非极大值抑制来过滤掉冗余的检测结果。
- 更新指标方法:在每个批次中更新检测指标,包括真阳性、置信度等。
- 获取统计方法:计算并返回检测结果的统计信息。
以上是对代码核心部分的提炼和详细注释,帮助理解其主要功能和逻辑。
这个程序文件 val.py 是一个用于YOLO(You Only Look Once)目标检测模型验证的实现,继承自 BaseValidator 类。程序的主要功能是对目标检测模型进行验证,计算各种性能指标,并可视化结果。
首先,程序导入了一些必要的库,包括操作系统、路径处理、NumPy、PyTorch,以及Ultralytics库中的一些模块和工具。这些模块提供了数据加载、模型验证、度量计算和图像绘制等功能。
在 DetectionValidator 类的构造函数中,初始化了一些必要的变量和设置,包括验证数据加载器、保存目录、进度条、参数和回调函数。该类的主要任务是处理目标检测的验证过程。构造函数中还定义了一些用于计算指标的变量,如 DetMetrics 用于存储检测指标,iou 用于计算mAP(平均精度)时的IoU(交并比)阈值。
preprocess 方法负责对输入的图像批次进行预处理,包括将图像数据转换为适合模型输入的格式,并根据需要进行归一化。该方法还处理了用于自动标注的边界框。
init_metrics 方法用于初始化评估指标,包括检查数据集是否为COCO格式,并根据模型的类别名称设置相应的指标。
get_desc 方法返回一个格式化的字符串,用于总结YOLO模型的类别指标。
postprocess 方法应用非极大值抑制(NMS)来处理模型的预测输出,以去除冗余的检测框。
_prepare_batch 和 _prepare_pred 方法分别用于准备验证批次的图像和注释数据,以及准备模型的预测结果,以便进行后续的评估。
update_metrics 方法用于更新指标统计信息,处理每个批次的预测结果,并与真实标签进行比较,以计算TP(真正例)、FP(假正例)等统计信息。
finalize_metrics 方法在验证结束时设置最终的指标值,包括速度和混淆矩阵。
get_stats 方法返回指标统计信息和结果字典,便于后续分析。
print_results 方法用于打印训练或验证集的每个类别的指标结果,并可视化混淆矩阵。
_process_batch 方法用于返回正确的预测矩阵,通过计算IoU来判断预测框与真实框的匹配情况。
build_dataset 和 get_dataloader 方法用于构建YOLO数据集和返回数据加载器,方便在验证过程中加载数据。
plot_val_samples 和 plot_predictions 方法用于绘制验证图像样本和预测结果,并将结果保存为图像文件。
save_one_txt 方法将YOLO检测结果保存为特定格式的文本文件,而 pred_to_json 方法则将预测结果序列化为COCO格式的JSON文件。
最后,eval_json 方法用于评估YOLO输出的JSON格式,并返回性能统计信息,支持与COCO评估工具的集成。
整体来看,这个程序文件提供了一个完整的框架,用于验证YOLO目标检测模型的性能,计算指标,并生成可视化结果,便于用户分析模型的效果。
10.3 fadc.py
以下是保留的核心代码部分,并附上详细的中文注释:
import torch
import torch.nn as nn
import torch.nn.functional as F
class OmniAttention(nn.Module):
def __init__(self, in_planes, out_planes, kernel_size, groups=1, reduction=0.0625, kernel_num=4, min_channel=16):
super(OmniAttention, self).__init__()
# 计算注意力通道数
attention_channel = max(int(in_planes * reduction), min_channel)
self.kernel_size = kernel_size
self.kernel_num = kernel_num
self.temperature = 1.0 # 温度参数,用于调整注意力的敏感度
# 定义各个层
self.avgpool = nn.AdaptiveAvgPool2d(1) # 自适应平均池化
self.fc = nn.Conv2d(in_planes, attention_channel, 1, bias=False) # 全连接层
self.bn = nn.BatchNorm2d(attention_channel) # 批归一化
self.relu = nn.ReLU(inplace=True) # ReLU激活函数
# 通道注意力
self.channel_fc = nn.Conv2d(attention_channel, in_planes, 1, bias=True)
self.func_channel = self.get_channel_attention
# 过滤器注意力
if in_planes == groups and in_planes == out_planes: # 深度可分离卷积
self.func_filter = self.skip
else:
self.filter_fc = nn.Conv2d(attention_channel, out_planes, 1, bias=True)
self.func_filter = self.get_filter_attention
# 空间注意力
if kernel_size == 1: # 点卷积
self.func_spatial = self.skip
else:
self.spatial_fc = nn.Conv2d(attention_channel, kernel_size * kernel_size, 1, bias=True)
self.func_spatial = self.get_spatial_attention
# 核心注意力
if kernel_num == 1:
self.func_kernel = self.skip
else:
self.kernel_fc = nn.Conv2d(attention_channel, kernel_num, 1, bias=True)
self.func_kernel = self.get_kernel_attention
self._initialize_weights() # 初始化权重
def _initialize_weights(self):
# 权重初始化
for m in self.modules():
if isinstance(m, nn.Conv2d):
nn.init.kaiming_normal_(m.weight, mode='fan_out', nonlinearity='relu')
if m.bias is not None:
nn.init.constant_(m.bias, 0)
if isinstance(m, nn.BatchNorm2d):
nn.init.constant_(m.weight, 1)
nn.init.constant_(m.bias, 0)
@staticmethod
def skip(_):
return 1.0 # 跳过操作,返回1.0
def get_channel_attention(self, x):
# 计算通道注意力
channel_attention = torch.sigmoid(self.channel_fc(x).view(x.size(0), -1, 1, 1) / self.temperature)
return channel_attention
def get_filter_attention(self, x):
# 计算过滤器注意力
filter_attention = torch.sigmoid(self.filter_fc(x).view(x.size(0), -1, 1, 1) / self.temperature)
return filter_attention
def get_spatial_attention(self, x):
# 计算空间注意力
spatial_attention = self.spatial_fc(x).view(x.size(0), 1, 1, 1, self.kernel_size, self.kernel_size)
spatial_attention = torch.sigmoid(spatial_attention / self.temperature)
return spatial_attention
def get_kernel_attention(self, x):
# 计算核心注意力
kernel_attention = self.kernel_fc(x).view(x.size(0), -1, 1, 1, 1, 1)
kernel_attention = F.softmax(kernel_attention / self.temperature, dim=1)
return kernel_attention
def forward(self, x):
# 前向传播
x = self.avgpool(x) # 自适应平均池化
x = self.fc(x) # 全连接层
x = self.bn(x) # 批归一化
x = self.relu(x) # ReLU激活
return self.func_channel(x), self.func_filter(x), self.func_spatial(x), self.func_kernel(x) # 返回各个注意力
class AdaptiveDilatedConv(nn.Module):
"""自适应膨胀卷积类,封装了可调变形卷积"""
def __init__(self, in_channels, out_channels, kernel_size, stride=1, padding=0, dilation=1, groups=1, bias=True):
super(AdaptiveDilatedConv, self).__init__()
self.conv = nn.Conv2d(in_channels, out_channels, kernel_size, stride=stride, padding=padding, dilation=dilation, groups=groups, bias=bias)
def forward(self, x):
# 前向传播
return self.conv(x) # 直接返回卷积结果
代码说明:
-
OmniAttention类:实现了多种注意力机制,包括通道注意力、过滤器注意力、空间注意力和核心注意力。通过不同的全连接层和卷积层来计算注意力权重,并在前向传播中应用这些权重。
-
AdaptiveDilatedConv类:实现了自适应膨胀卷积,封装了标准的卷积操作,允许在卷积中使用膨胀率以捕捉更大的上下文信息。
这些类的设计使得网络能够更灵活地处理输入数据,增强特征提取能力。
这个程序文件 fadc.py 是一个用于深度学习的 PyTorch 模块,主要实现了一些复杂的卷积操作和注意力机制,特别是针对图像处理的任务。以下是对代码的详细讲解。
首先,文件中导入了必要的库,包括 PyTorch 和一些用于卷积操作的模块。代码中还尝试从 mmcv 库中导入一个名为 ModulatedDeformConv2d 的类,如果导入失败,则将其替换为普通的 nn.Module。
接下来,定义了一个名为 OmniAttention 的类,它是一个注意力机制模块。这个模块的初始化方法接受多个参数,包括输入和输出通道数、卷积核大小、组数、通道缩减比例等。该模块的主要功能是通过自适应的方式计算通道注意力、过滤器注意力、空间注意力和卷积核注意力。它使用了多个卷积层和激活函数来实现这些功能,并在前向传播中计算这些注意力权重。
接着,定义了一个 generate_laplacian_pyramid 函数,用于生成拉普拉斯金字塔。这个函数接受一个输入张量和金字塔的层数,通过逐层下采样和计算拉普拉斯差分来构建金字塔。它使用了双线性插值方法来进行上采样和下采样。
然后,定义了一个 FrequencySelection 类,它用于选择特定频率的特征。该类允许通过不同的池化方式(如平均池化、拉普拉斯池化等)来处理输入特征,并使用卷积层来生成频率权重。它还支持全局选择和不同的激活函数。
接下来,定义了 AdaptiveDilatedConv 类,这是一个自适应扩张卷积的实现。它继承自 ModulatedDeformConv2d,并在初始化时设置了卷积的偏移量、填充模式和其他参数。这个类的前向传播方法实现了自适应卷积操作,结合了之前定义的注意力机制。
最后,定义了 AdaptiveDilatedDWConv 类,这是一个针对深度可分离卷积的自适应扩张卷积实现。与 AdaptiveDilatedConv 类似,它也使用了注意力机制和频率选择,但在处理输入时考虑了普通卷积的维度。
整体来看,这个文件实现了一个复杂的卷积神经网络模块,结合了多种注意力机制和频率选择技术,适用于图像处理和计算机视觉任务。通过自适应的方式,该模块能够更好地捕捉输入数据中的重要特征,从而提高模型的性能。
10.4 rep_block.py
以下是保留的核心代码部分,并附上详细的中文注释:
import torch
import torch.nn as nn
import torch.nn.functional as F
# 定义一个用于卷积和批归一化的组合函数
def conv_bn(in_channels, out_channels, kernel_size, stride=1, padding=0, dilation=1, groups=1):
# 创建卷积层
conv_layer = nn.Conv2d(in_channels=in_channels, out_channels=out_channels, kernel_size=kernel_size,
stride=stride, padding=padding, dilation=dilation, groups=groups,
bias=False) # 不使用偏置,因为后面会加上BatchNorm
# 创建批归一化层
bn_layer = nn.BatchNorm2d(num_features=out_channels, affine=True)
# 将卷积层和批归一化层组合成一个顺序容器
return nn.Sequential(conv_layer, bn_layer)
# 定义一个多分支块类
class DiverseBranchBlock(nn.Module):
def __init__(self, in_channels, out_channels, kernel_size, stride=1, padding=None, dilation=1, groups=1):
super(DiverseBranchBlock, self).__init__()
# 如果没有指定padding,则根据kernel_size和dilation自动计算
if padding is None:
padding = kernel_size // 2
# 定义原始卷积和批归一化
self.dbb_origin = conv_bn(in_channels=in_channels, out_channels=out_channels, kernel_size=kernel_size,
stride=stride, padding=padding, dilation=dilation, groups=groups)
# 定义一个平均池化分支
self.dbb_avg = nn.Sequential(
nn.Conv2d(in_channels=in_channels, out_channels=out_channels, kernel_size=1, stride=1, padding=0, groups=groups, bias=False),
nn.BatchNorm2d(out_channels),
nn.AvgPool2d(kernel_size=kernel_size, stride=stride, padding=0)
)
# 定义一个1x1卷积分支
self.dbb_1x1_kxk = nn.Sequential(
nn.Conv2d(in_channels=in_channels, out_channels=out_channels, kernel_size=1, stride=stride, padding=0, groups=groups, bias=False),
nn.BatchNorm2d(out_channels),
nn.Conv2d(in_channels=out_channels, out_channels=out_channels, kernel_size=kernel_size, stride=stride, padding=0, groups=groups, bias=False),
nn.BatchNorm2d(out_channels)
)
def forward(self, inputs):
# 前向传播
out = self.dbb_origin(inputs) # 通过原始卷积分支
out += self.dbb_avg(inputs) # 加上平均池化分支的输出
out += self.dbb_1x1_kxk(inputs) # 加上1x1卷积分支的输出
return out # 返回最终的输出
# 测试代码
if __name__ == "__main__":
# 创建一个DiverseBranchBlock实例
dbb = DiverseBranchBlock(in_channels=3, out_channels=16, kernel_size=3)
# 创建一个随机输入张量
input_tensor = torch.randn(1, 3, 32, 32) # Batch size=1, Channels=3, Height=32, Width=32
# 进行前向传播
output_tensor = dbb(input_tensor)
print(output_tensor.shape) # 输出形状
代码说明:
-
conv_bn: 该函数用于创建一个包含卷积层和批归一化层的顺序模块。卷积层的偏置设置为
False,因为后续会通过批归一化层来处理偏置。 -
DiverseBranchBlock: 这是一个多分支块的定义,包含三个主要分支:
- dbb_origin: 原始的卷积和批归一化分支。
- dbb_avg: 通过1x1卷积和平均池化实现的分支。
- dbb_1x1_kxk: 通过1x1卷积和后续的卷积实现的分支。
-
forward: 在前向传播中,输入数据依次通过三个分支,最后将它们的输出相加并返回。
-
测试代码: 在
__main__部分,创建了一个DiverseBranchBlock实例,并通过随机生成的输入张量测试其前向传播功能。
这个程序文件 rep_block.py 是一个实现多种卷积块的 PyTorch 模块,主要用于深度学习中的卷积神经网络(CNN)。该文件定义了多个类和函数,用于构建不同类型的卷积块,特别是多分支的卷积结构,以提高网络的表现力和灵活性。
首先,文件中导入了必要的库,包括 torch 和 torch.nn,这些是构建神经网络的基础库。此外,还导入了自定义的卷积模块 Conv 和 autopad 函数,这些可能用于处理卷积层的特定需求。
接下来,文件定义了一些转换函数,例如 transI_fusebn、transII_addbranch 等,这些函数用于处理卷积核和偏置的融合、分支的合并等操作。这些函数在网络的前向传播和模型转换(例如从训练模式到推理模式)中起到关键作用。
文件中定义了多个类,主要包括 DiverseBranchBlock、WideDiverseBranchBlock 和 DeepDiverseBranchBlock。这些类的构造函数接受多个参数,如输入通道数、输出通道数、卷积核大小、步幅、填充等,允许用户根据需求灵活配置卷积块的结构。
DiverseBranchBlock 类实现了一个多分支的卷积块,包含多个不同的卷积路径(如标准卷积、1x1卷积、平均池化等),并在前向传播中将这些路径的输出相加。这个设计使得网络能够从不同的特征提取路径中学习,从而提高性能。
WideDiverseBranchBlock 类在 DiverseBranchBlock 的基础上增加了水平和垂直卷积的处理,进一步增强了特征提取的能力。它通过定义额外的卷积层和批归一化层来实现这一点。
DeepDiverseBranchBlock 类则在 DiverseBranchBlock 的基础上,增加了更深层次的结构,允许更复杂的特征学习。它的设计允许在训练和推理阶段之间进行切换,以优化性能。
每个类中都实现了 forward 方法,用于定义前向传播的计算过程。在前向传播中,输入数据通过各个卷积层进行处理,最终将所有分支的输出相加,经过非线性激活函数后返回。
此外,文件中还定义了一些辅助方法,如 get_equivalent_kernel_bias 和 switch_to_deploy,用于获取等效的卷积核和偏置,以及在模型部署时的转换。这些方法确保在不同模式下(训练和推理)模型的行为一致。
总的来说,这个文件实现了一个灵活且强大的卷积块结构,适用于各种深度学习任务,特别是在需要高效特征提取的计算机视觉应用中。通过不同的分支和卷积策略,这些类能够有效地提高模型的表达能力和性能。
注意:由于此博客编辑较早,上面“10.YOLOv11核心改进源码讲解”中部分代码可能会优化升级,仅供参考学习,以“11.完整训练+Web前端界面+200+种全套创新点源码、数据集获取(由于版权原因,本博客仅提供【原始博客的链接】,原始博客提供下载链接)”的内容为准。
11.完整训练+Web前端界面+200+种全套创新点源码、数据集获取(由于版权原因,本博客仅提供【原始博客的链接】,原始博客提供下载链接)

参考原始博客1: https://gitee.com/Vision-Studios/Empty-spaces-in-a-supermarket-hanger58
参考原始博客2: https://github.com/Qunmasj-Vision-Studio/Empty-spaces-in-a-supermarket-hanger58 在这里插入图片描述](https://i-blog.csdnimg.cn/direct/e9a022a69f464973943296752c3a7ee8.png#pic_center)



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









