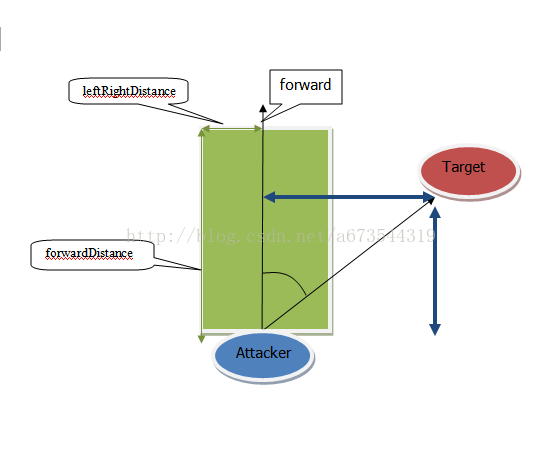
private float forwardDistance = 5f;
private float leftRightDistance = 3f;
private bool InRanage(Transform attacker, Transform target) {
// 指向目标的向量
Vector3 dir = target.position - attacker.position;
/* 点乘结果大于0则表示夹角小于90度 点乘:a*b=|a|*|b|*cos(夹角)
* 这里因为attacker.forward的大小是1,所以点乘结果就等于dir*cos(夹角) ,
* dir是斜边,则结果是邻边大小,也就是dir投射到forward的大小
*/
float dot = Vector3.Dot(attacker.forward, dir);
if (dot>0 && dot < forwardDistance) { // 在正前方且小于指定距离
float radias = Vector3.Angle(attacker.forward, dir) * Mathf.Deg2Rad;
float x = dir.magnitude * Mathf.Sin(radias);
if (x < leftRightDistance) { // 左右距离在指定范围
//Debug.Log("在范围内!");
LeftRight(attacker, target);
return true;
}
}
return false;
}
private void LeftRight(Transform attacker, Transform target) {
Vector3 dir = target.position - attacker.position;
Vector3 cross= Vector3.Cross(attacker.forward, dir);
if (cross.y>0) {
Debug.Log("右边");
} else {
Debug.Log("左边");
}
}
























 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









