






完整的PID和LQR四旋翼无人机simulink,matlab仿真,两个slx文件一个m文件,有一篇资料与其对应学习。
ID:6320691588244032
三国幸运的银鱼
在无人机领域,控制算法的设计和仿真是非常关键的一环。PID和LQR是常用的控制算法,它们能够使无人机在飞行过程中稳定、精确地执行任务。本文将介绍如何使用Simulink和Matlab进行完整的PID和LQR四旋翼无人机仿真,并提供相应的仿真文件和学习资料。
首先,我们需要了解PID和LQR控制算法的基本原理。PID控制算法是一种经典的反馈控制算法,它通过比较期望输出和实际输出之间的差异,并根据比例、积分和微分的加权和来调整控制信号,使得系统的输出稳定在期望值附近。然而,PID控制算法的参数调整相对较为困难,需要根据系统的性能要求和动态特性进行反复试验和调整。
相比之下,LQR(线性二次调节)控制算法是一种优化控制方法,它通过设计一个带有状态反馈的线性二次代价函数,使得系统的输出能够最小化该代价函数。LQR控制算法具有更好的控制性能和鲁棒性,但相应的设计过程较为繁琐,需要对系统的状态空间进行建模和参数优化。
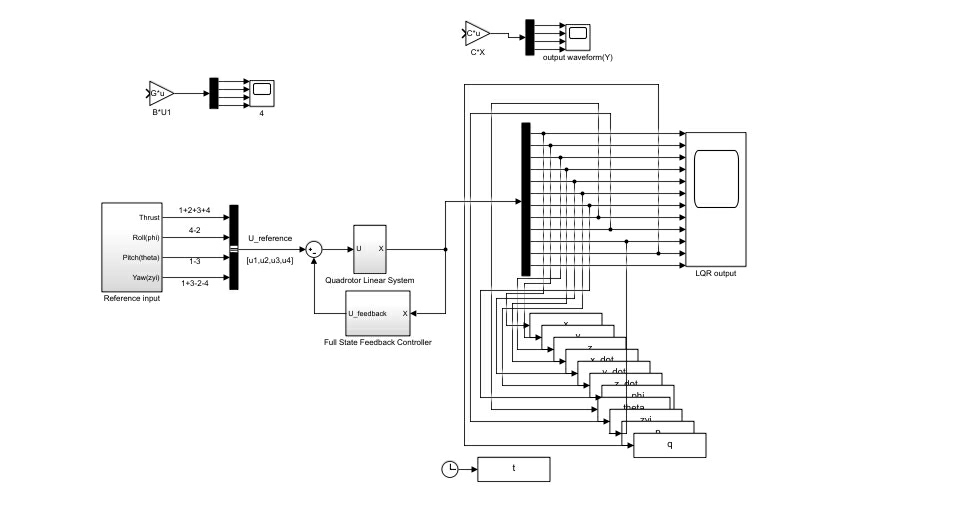
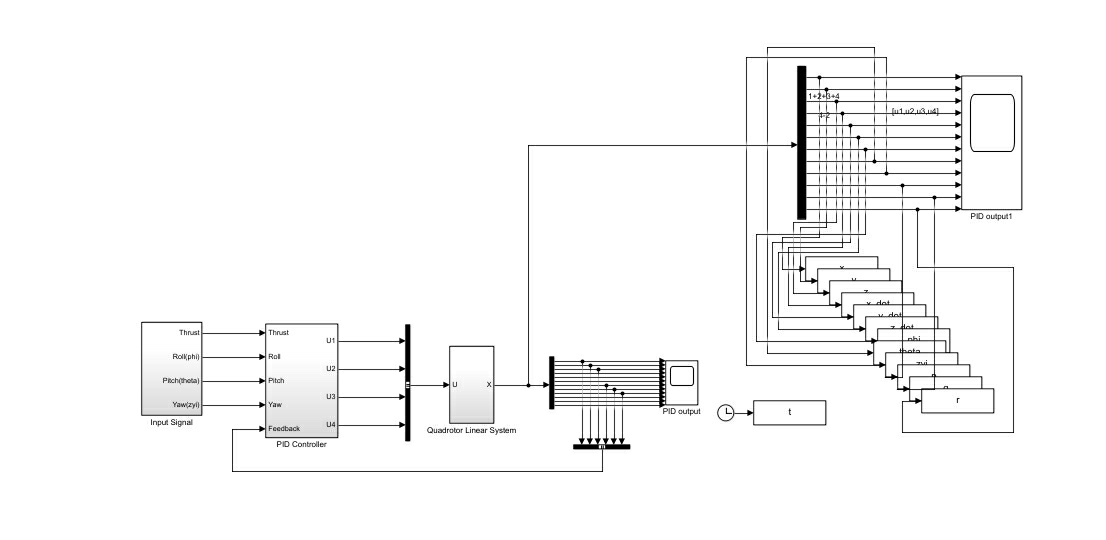
在Simulink中,我们可以使用Block Diagram模块库来搭建四旋翼无人机的仿真模型。首先,我们需要定义系统的状态空间模型,包括飞行器的位置、姿态、速度等状态变量。然后,根据PID和LQR控制算法的原理,我们可以设计相应的控制器模块,并将其与无人机模型进行连接。
具体而言,我们可以编写一个m文件来定义四旋翼无人机的动力学方程和状态空间模型,该文件可以被Simulink模型调用。在Simulink模型中,我们可以使用PID Controller模块来实现PID控制器的功能,同时使用LQR Controller模块来实现LQR控制器的功能。通过调整PID和LQR控制器的参数,我们可以对无人机的飞行性能进行优化和调整。
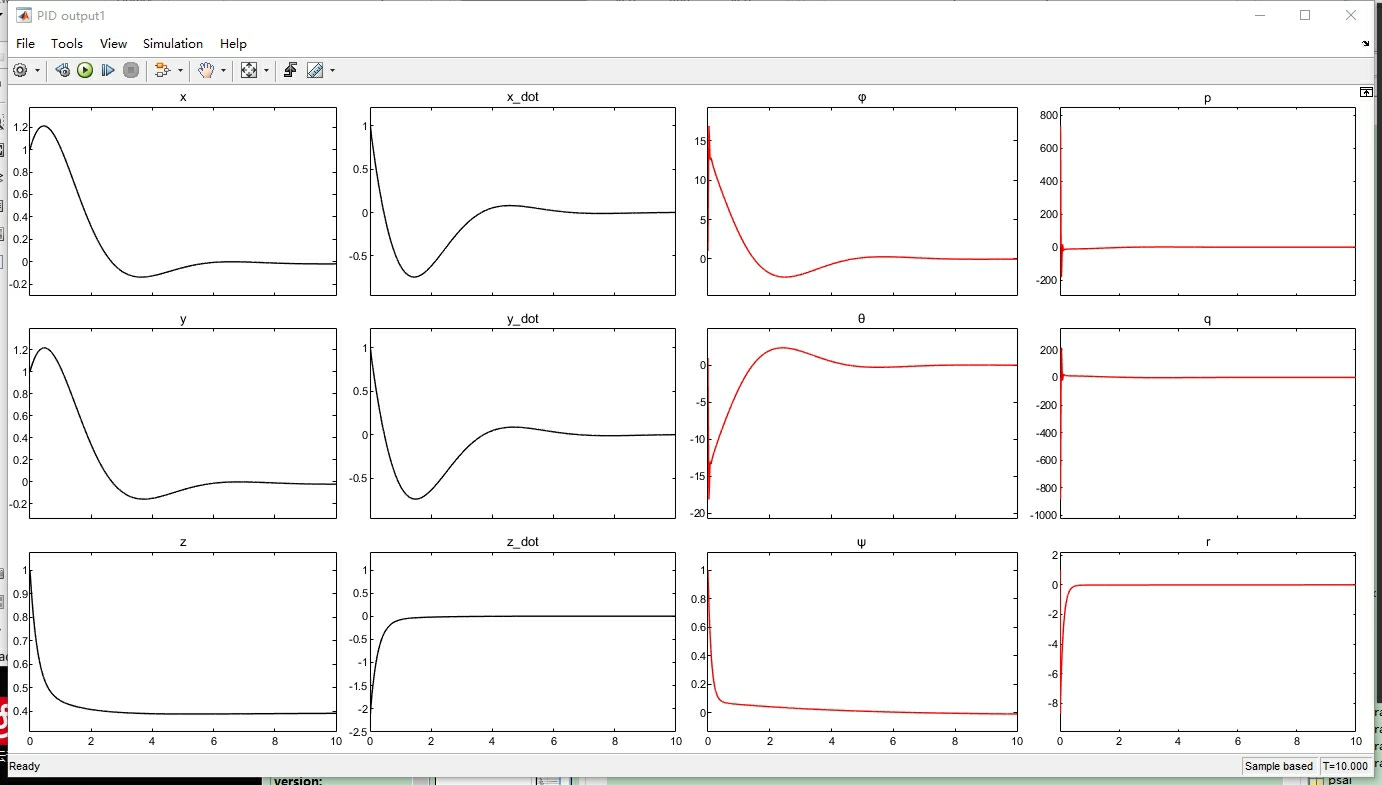
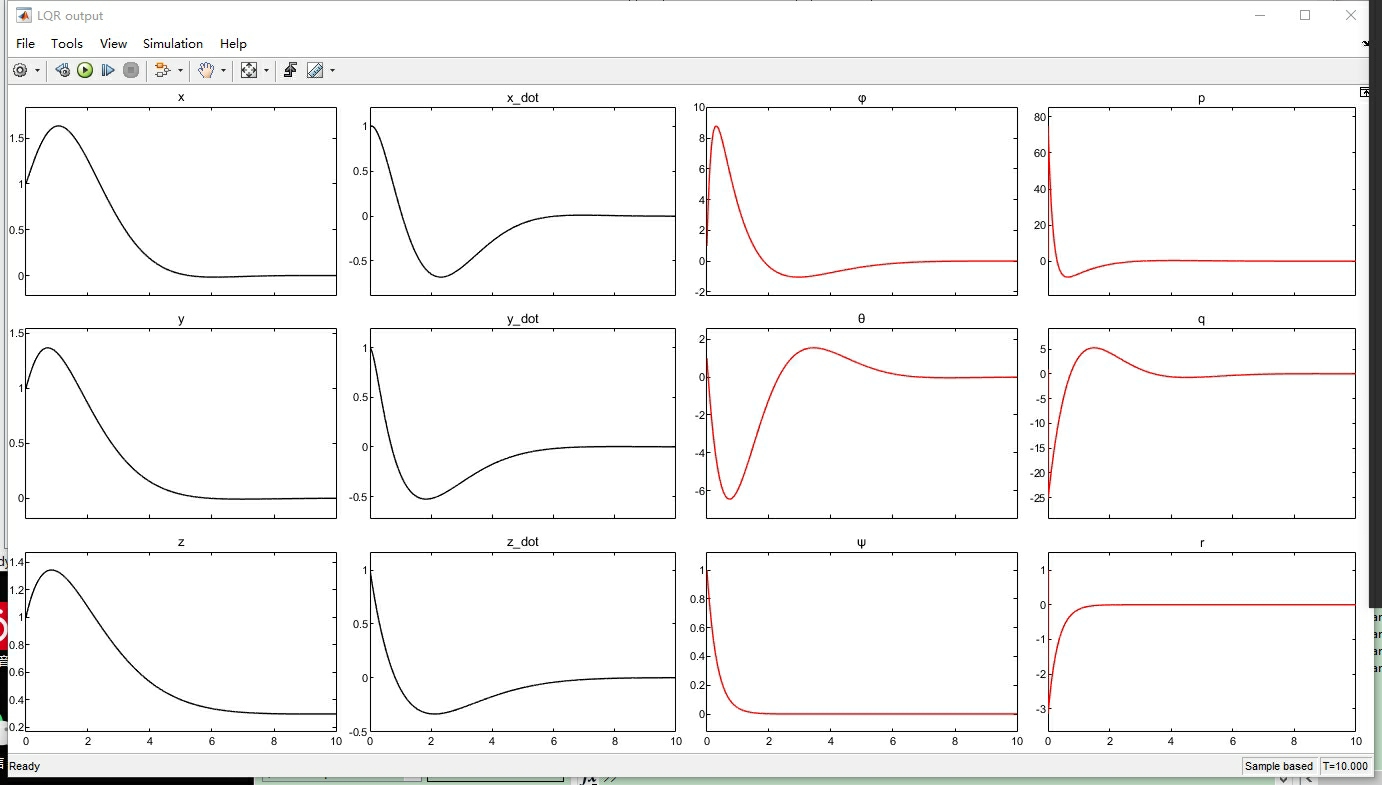
此外,我们还可以使用Simulink中的Scope模块来实时显示无人机的输出响应,以便对控制算法进行调试和评估。通过模拟仿真,我们能够观察到无人机在不同控制算法下的飞行表现,并对其进行性能比较和分析。
总之,PID和LQR控制算法是无人机控制领域中常用的算法,它们能够使无人机在飞行过程中实现稳定、精确的飞行控制。通过Simulink和Matlab的仿真平台,我们可以进行完整的PID和LQR四旋翼无人机仿真,以及相关控制算法的优化和分析。在本文中,我们提供了相应的仿真文件和学习资料,希望能够对读者在无人机控制算法的学习和应用中起到一定的帮助。
关键词:无人机,PID控制,LQR控制,Simulink仿真,Matlab仿真,控制算法设计与优化,飞行性能分析。
以上相关代码,程序地址:http://wekup.cn/691588244032.html
















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









