










序言
话痨出现!!
XC兴起安排了一天讲课,其中还有网络流,趁这个时间把网络流好好总结一下。
想让我在Blog里讲网络流原理?讲原理是不可能讲原理的,这辈子都不可能讲原理的。
网络流的算法多如浮云,就像麦趣鸡盒。(我才没有打广告)

听完课之后高兴的去研究国家历史。
推荐dalao的Blog。
前置技能
最大流问题的基本模型
P3376 【模板】网络最大流
通俗地讲,题面大概是这样子的:
现在给出一张有向图:

现在有若干个点的有向图,每个点的容量是无限的,其中点
S
S
有无限量的水,每条边有一个权值,代表这条边的一次性流量为
w
w
个单位,询问最多可以有多少水流到点。
显然,上图的最大流为
20
20
。
费用流问题的基本模型
P3381 【模板】最小费用最大流
通俗地讲,这个问题为最大流问题的加强版:每条边新增一个边权
c
c
,代表这条边的单位流量单价为,在保证流量最大的同时使得费用最小/最大。
增广路
对于一条路径
(S,T)
(
S
,
T
)
,若其中所有边的残余流量都不为
0
0
,那么我们称其为一条增广路。
前置技能Get!!
最大流基本算法
基本操作(Ford-Fulkerson方法)
- 找到一条增广路
- 将增广路流完,同时添加反向弧
反向弧
我们可以看到,在基本操作中,有一个添加反向弧的操作。
对于一条搜索到的增广路中的每一条边,在流完
w′
w
′
的流量后,添加一条
(v,u,w′)
(
v
,
u
,
w
′
)
的反向边。
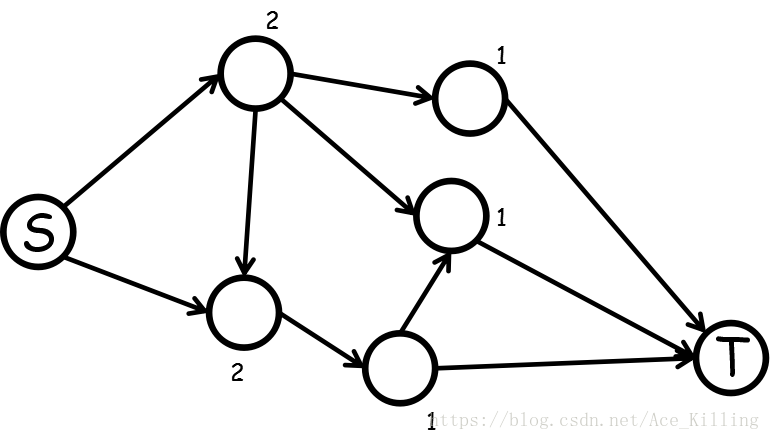
为什么要有添加反向弧这一个操作?
现在给出一个明显的例子:
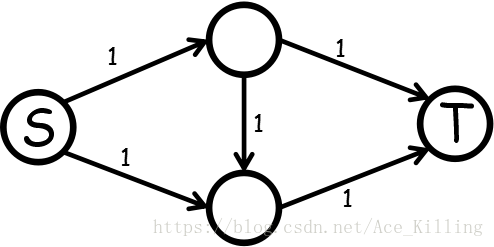
显然,这张图的最大流是
2
2
。
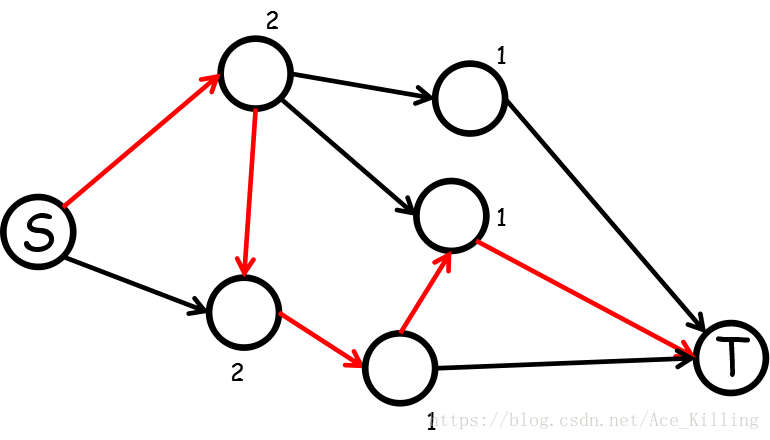
但是,当经过这样一条增广路:
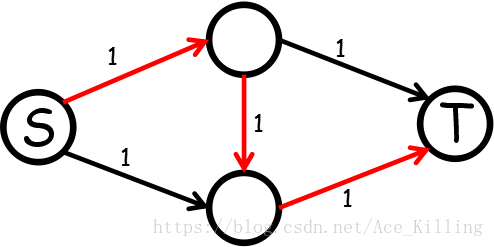
整张网络的流量就变为了,显然,这是不正确的。
错误的原因就是我们没有给程序一个改正的机会。
那我们应该怎么做?回溯搜索显然是不行的。
既然如此,我们引入反向弧。
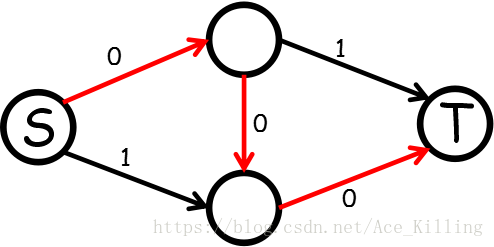
为什么添加反向弧就可以保证正确性?
再添加反向边后,我们就可以将之前流的流量给退回去,从而保证了其正确性。
这就是精华部分,利用反向边,使程序有了一个后悔和改正的机会。
Ford-Fulkerson
Ford-Fulkerson算法利用DFS实现搜索增广路,在搜寻到增广路后,更新网络。(其实就是暴力方法)
时间复杂度:
O(E|f∗|)
O
(
E
|
f
∗
|
)
(
f∗
f
∗
为最大流)
Ford-Fulkerson算法的缺点非常明显,因为其时间随着最大流增大而增大。若是在下面的这张图,Ford-Fulkerson算法可能会出现搜索时间过大的情况。
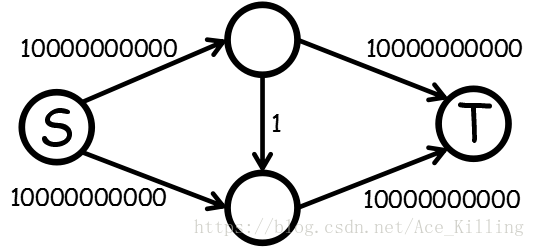
假如你运气不好,你可能会在中间的那条边一直跑。
Edmonds-Karp
Edmonds-Karp算法与Ford-Fulkerson算法最大的差异在于Edmonds-Karp算法利用BFS实现搜寻增广路,解决了由于最大流过大而引起的时间问题。
时间复杂度:
O(V2E)
O
(
V
2
E
)
Code
struct Edge
{
int from, to , cap , flow;
Edge(int u, int v, int c, int f) : from(u), to(v), cap(c), flow(f) {}
};
struct Edmonds_Karp
{
int n, m;
vector < Edge > edges;
vector < int > G[MAXN];
int a[MAXN];
int p[MAXN];
void init(int n)
{
for (int i = 0; i < n; ++i)
G[i].clear();
edges.clear();
}
void AddEdge(int from, int to, int cap)
{
edges.push_back(Edge(from, to, cap, 0));
edges.push_back(Edge(to, from, 0, 0));
m = edges.size();
G[from].push_back(m - 2);
G[to].push_back(m - 1);
}
int Maxflow(int s, int t)
{
int flow = 0;
for (;;)
{
memset(a, 0, sizeof a);
queue < int > Q;
Q.push(s);
a[s] = INF;
while (!Q.empty())
{
int x = Q.front();
Q.pop();
for (int i = 0; i < G[x].size(); ++i)
{
Edge &e = edges[G[x][i]];
if (!a[e.to] && e.cap > e.flow)
{
p[e.to] = G[x][i];
a[e.to] = min(a[x], e.cap - e.flow);
Q.push(e.to);
}
}
if (a[t])
break;
}
if (!a[t])
break;
for (int u = t; u != s; u = edges[p[u]].from)
{
edges[p[u]].flow += a[t];
edges[p[u] ^ 1].flow -= a[t];
}
flow += a[t];
}
return flow;
}
};Dinic
Wiki:
Dinic算法与Edmonds–Karp算法的不同之处在于它每轮算法都选择最短的可行路径进行增广。Dinic算法中采用高度标号(level graph)以及阻塞流(blocking flow)实现其性能。
Kdmonds-Karp算法,每进行一次增广,都要做一遍BFS,十分浪费。能否少做几次BFS? 这就是Dinic算法要解决的问题。
简单来讲,Dinic算法通过BFS在参与网络上处理出距离标号,然后严格按照顺序进行增广。
每条在增广路中的边
(u,v)
(
u
,
v
)
必须严格满足
dep(u)=dep(v)+1
d
e
p
(
u
)
=
d
e
p
(
v
)
+
1
意思就是说,下面这条增广路是不合法的。
同时,在一次标号后,Dinic算法可以进行多路增广。(详见代码)
时间复杂度:
O(V2E)
O
(
V
2
E
)
(二分图:
O(V−−√E)
O
(
V
E
)
)
Code
#include <cstdio>
#include <cstring>
#include <cmath>
#include <algorithm>
#include <queue>
using namespace std;
struct node
{
int v, w, next;
node() {}
node(int _v, int _w, int _next) {v = _v, w = _w, next = _next;}
};
const int MaxN = 10000;
const int MaxM = 100000;
int n, m, s, t;
int ans;
node d[MaxM * 2 + 1];
int final[MaxN + 1], cnt = 1;//"cnt = 1"方便找到反向边
int cur[MaxN + 1]/*当前弧优化*/, dep[MaxN + 1]/*距离标号*/;
void Insert(int u, int v, int w)
{
d[++cnt] = node(v, w, final[u]), final[u] = cnt;
}
bool Bfs()//处理距离标号
{
memset(dep, 0, sizeof(dep));
for (int i = 1; i <= n; i++)
cur[i] = final[i];
queue <int> q;
q.push(s);
for (; !q.empty(); q.pop())
{
int u = q.front(), v;
dep[u]++;
for (int i = final[u]; i; i = d[i].next)
if (d[i].w && i % 2 == 0)
{
v = d[i].v;
if (!dep[v])
{
dep[v] = dep[u];
q.push(v);
}
}
}
return dep[t];
}
int Dfs(int u, int w)
{
if (u == t)
return w;
int _w = 0;
for (int i = cur[u]; i; i = d[i].next)
{
int v = d[i].v;
cur[u] = i;//当前弧优化
if (dep[u] + 1 == dep[v])//按照标号增广
{
int tmp = Dfs(v, min(w - _w, d[i].w));
_w += tmp;
d[i].w -= tmp;
d[i ^ 1].w += tmp;
//更新反向弧
if (w == _w)
return _w;
}
}
return _w;
}
void Dinic(int u)
{
for (; Bfs();)
ans += Dfs(s, 1 << 30);
}
int main(int argc, char const *argv[])
{
//freopen("init.in", "r", stdin);
scanf("%d%d%d%d", &n, &m, &s, &t);
for (int i = 1; i <= m; i++)
{
int u, v, w;
scanf("%d%d%d", &u, &v, &w);
Insert(u, v, w);
Insert(v, u, 0);
//添加正反向边
}
Dinic(s);
printf("%d\n", ans);
return 0;
}ISAP
ISAP(Improved Shortest Augmenting Path)算法是另外一种基于分层思想的网络流算法,所不同的是,其节省了Dinic算法在每次增广后需要在残余网络上重新标号的问题,而是在每次增广完成后自动更新点的标号。(详见代码)
更重要的是,其引入了GAP优化,在下文会给予讲述。
时间复杂度:理论上为
O(V2E)
O
(
V
2
E
)
,但在非二分图的情况下,由于GAP优化的引入,时间玄学。
Code
#include <cstdio>
#include <cstring>
#include <cmath>
#include <algorithm>
using namespace std;
struct node
{
int v, w, next;
node() {}
node(int _v, int _w, int _next) {v = _v, w = _w, next = _next;}
};
const int MaxN = 10000;
const int MaxM = 100000;
int n, m, s, t;
int ans;
node d[MaxM * 2 + 1];
int final[MaxN + 1], cnt = 1;
int cur[MaxN + 1];
int dep[MaxN + 1], st[MaxN + 1];
void Insert(int u, int v, int w)
{
d[++cnt] = node(v, w, final[u]), final[u] = cnt;
}
int SAP(int u, int w)
{
if (u == t)//流到汇点,退出
return w;
int _w = 0;
for (int i = cur[u]; i; i = d[i].next)
{
int v = d[i].v;
cur[u] = i;//当前弧优化
if (d[i].w && dep[v] + 1 == dep[u])
{
int tmp = SAP(v, min(d[i].w, w - _w));
_w += tmp, d[i].w -= tmp, d[i ^ 1].w += tmp;//更新反向弧
if (w == _w)//满流退出
return w;
}
}
cur[u] = final[u];
if (!(--st[dep[u]]))//重标号,GAP优化
dep[s] = n;
++st[++dep[u]];//GAP优化
return _w;
}
int main(int argc, char const *argv[])
{
//freopen("init.in", "r", stdin);
scanf("%d%d%d%d", &n, &m, &s, &t);
for (int i = 1; i <= m; i++)
{
int u, v, w;
scanf("%d%d%d", &u, &v, &w);
Insert(u, v, w);
Insert(v, u, 0);//添加反向弧
}
st[0] = n;
for (; dep[s] < n;)//进行增广直至出现断层
ans += SAP(s, 1 << 30);
printf("%d\n", ans);
return 0;
}当前弧优化
在上文叙述的Dinic算法以及ISAP算法中都出现了数组
cur[]
c
u
r
[
]
——当前弧优化数组。
这是什么?为什么要这么做?
现在给出一个简单的问题:有一样事情在你的计划里,你已经完成的非常出色,现在叫你再去完成一遍,你愿意吗?
显然!!!没有人愿意。
同理,当前弧优化记录了当前走到的弧,避免了再次递归到时的重新枚举。
GAP(断层)优化
在ISAP算法中引入了GAP优化,即代码中的数组
st[]
s
t
[
]
。
st[dep]
s
t
[
d
e
p
]
表示距离标号为
dep
d
e
p
的节点有
st[dep]
s
t
[
d
e
p
]
个。
有个十分显然的性质就是当其中的一个
st[]=0
s
t
[
]
=
0
时,网络出现断层,进而无法继续增广,算法结束。(详见ISAP算法代码)
费用流基本算法
对于费用流问题,我们依旧采用Ford-Fulkerson方法,采用Dinic算法,只不过将BFS标号改为SPFA或Dijkstar算最短路,每次沿着最短路增广。(但貌似多路增广会出锅,求dalao解释)
Code
#include <cstdio>
#include <cstring>
#include <cmath>
#include <algorithm>
#include <queue>
using namespace std;
struct node
{
int v, w, dis, next;
node() {}
node(int _v, int _w, int _dis, int _next) {v = _v, w = _w, dis = _dis, next = _next;}
};
const int MaxN = 5000;
const int MaxM = 50000;
int n, m, s, t;
int ans, cost;
node d[MaxM * 2 + 10];
int final[MaxN + 1], cnt = 1;
int cur[MaxN + 1], dis[MaxN + 1];
int _w[MaxN + 1], prev[MaxN + 1];
bool bj[MaxN + 1];
queue <int> q;
void Insert(int u, int v, int w, int dis)
{
d[++cnt] = node(v, w, dis, final[u]), final[u] = cnt;
}
bool SPFA(int s, int t)
{
memset(dis, 0x7f, sizeof(dis));
memset(_w, 0x7f, sizeof(_w));
memset(bj, false, sizeof(bj));
bj[s] = true;
dis[s] = 0;
prev[t] = 0;
q.push(s);
for (; !q.empty(); q.pop())
{
int u = q.front(), v;
for (int i = final[u]; i; i = d[i].next)
{
v = d[i].v;
if (d[i].w && dis[v] > dis[u] + d[i].dis)
{
dis[v] = dis[u] + d[i].dis;
prev[v] = u;
cur[v] = i;
_w[v] = min(_w[u], d[i].w);
if (!bj[v])
{
q.push(v);
bj[v] = true;
}
}
}
bj[u] = false;
}
return prev[t];
}
void Mininum_Cost_Maxinum_Flow()
{
for (; SPFA(s, t);)
{
int u = t;
ans += _w[t];
cost += _w[t] * dis[t];
while (u != s)
{
d[cur[u]].w -= _w[t];
d[cur[u] ^ 1].w += _w[t];
u = prev[u];
}
}
}
int main(int argc, char const *argv[])
{
freopen("init.in", "r", stdin);
scanf("%d%d%d%d", &n, &m, &s, &t);
for (int i = 1; i <= m; i++)
{
int u, v, w, dis;
scanf("%d%d%d%d", &u, &v, &w, &dis);
Insert(u, v, w, dis);
Insert(v, u, 0, -dis);
}
Mininum_Cost_Maxinum_Flow();
printf("%d %d\n", ans, cost);
return 0;
}总结
话痨出现!!
对的没有错,我又来说垃圾话了。
网络流这种1956年的巨佬提出来的东西,现在变成了OI毒瘤……
怎么讲,网络流这个东西如果裸的出现,那么它一般是预流推进了,你可以准备上暴力。
但如果它出现在题里,要你建模的话,恭喜你,你是不可能建出模型的,你可以准备上暴力。(除非你是dalao,蒟蒻在此膜拜)














 488
488











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









