







源码下载:http://download.csdn.net/download/adam_zs/10222492

import matplotlib.pyplot as plt
import pandas as pd
import numpy as np
'''科比生涯数据'''
pd.set_option('display.height', 9999)
pd.set_option('display.max_rows', 9999)
pd.set_option('display.max_columns', 9999)
pd.set_option('display.width', 9999)
raw = pd.read_csv("data.csv")
# print(raw.shape) #(30697, 25)
# print(raw.head())
'''
action_type combined_shot_type game_event_id game_id lat loc_x loc_y lon minutes_remaining period playoffs season seconds_remaining shot_distance shot_made_flag shot_type shot_zone_area shot_zone_basic shot_zone_range team_id team_name game_date matchup opponent shot_id
0 Jump Shot Jump Shot 10 20000012 33.9723 167 72 -118.1028 10 1 0 2000-01 27 18 NaN 2PT Field Goal Right Side(R) Mid-Range 16-24 ft. 1610612747 Los Angeles Lakers 2000-10-31 LAL @ POR POR 1
1 Jump Shot Jump Shot 12 20000012 34.0443 -157 0 -118.4268 10 1 0 2000-01 22 15 0.0 2PT Field Goal Left Side(L) Mid-Range 8-16 ft. 1610612747 Los Angeles Lakers 2000-10-31 LAL @ POR POR 2
2 Jump Shot Jump Shot 35 20000012 33.9093 -101 135 -118.3708 7 1 0 2000-01 45 16 1.0 2PT Field Goal Left Side Center(LC) Mid-Range 16-24 ft. 1610612747 Los Angeles Lakers 2000-10-31 LAL @ POR POR 3
3 Jump Shot Jump Shot 43 20000012 33.8693 138 175 -118.1318 6 1 0 2000-01 52 22 0.0 2PT Field Goal Right Side Center(RC) Mid-Range 16-24 ft. 1610612747 Los Angeles Lakers 2000-10-31 LAL @ POR POR 4
4 Driving Dunk Shot Dunk 155 20000012 34.0443 0 0 -118.2698 6 2 0 2000-01 19 0 1.0 2PT Field Goal Center(C) Restricted Area Less Than 8 ft. 1610612747 Los Angeles Lakers 2000-10-31 LAL @ POR POR 5
'''
# shot_made_flag 是否进球
kobe = raw[pd.notnull(raw["shot_made_flag"])]
# print(kobe.shape) # (25697, 25)
plt.figure(figsize=(10, 10))
# alpha = 0.02 # 透明度
# plt.subplot(121)
# plt.scatter(kobe["loc_x"], kobe["loc_y"], color="R", alpha=alpha) # 球场中坐标
# plt.title("loc_x and loc_y")
# plt.subplot(122)
# plt.scatter(kobe["lon"], kobe["lat"], color="B", alpha=alpha) # 经纬度
# plt.title("lon and lat")
# plt.show()
# 极坐标,到圆心的距离+与X轴的夹角
# raw['dist'] = np.sqrt(raw['loc_x'] ** 2 + raw['loc_y'] ** 2)
# loc_x_zero = raw['loc_x'] == 0
# raw['angle'] = np.array([0] * len(raw))
# raw['angle'][~loc_x_zero] = np.arctan(raw['loc_y'][~loc_x_zero] / raw['loc_x'][~loc_x_zero])
# raw['angle'][loc_x_zero] = np.pi / 2
# raw['remaining_time'] = raw['minutes_remaining'] * 60 + raw['seconds_remaining']
# print(kobe["action_type"].unique())
# print(kobe["combined_shot_type"].unique())
# print(kobe["shot_type"].unique())
# print(kobe["shot_type"].value_counts())
# season 赛季
# print(kobe['season'].unique())
raw['season'] = raw['season'].apply(lambda x: int(x.split("-")[1]))
# print(raw['season'].unique())
#
# print(kobe['team_id'].unique())
# print(kobe['team_name'].unique())
gs = kobe.groupby("shot_zone_area")
# print(kobe["shot_zone_area"].value_counts())
# print(len(gs))
# print(kobe["shot_zone_area"].unique())
'''
['Left Side(L)' 'Left Side Center(LC)' 'Right Side Center(RC)' 'Center(C)'
'Right Side(R)' 'Back Court(BC)']
'''
# print(kobe["shot_zone_basic"].unique())
'''
['Mid-Range' 'Restricted Area' 'In The Paint (Non-RA)' 'Above the Break 3'
'Right Corner 3' 'Backcourt' 'Left Corner 3']
'''
# print(kobe["shot_zone_range"].unique())
'''['8-16 ft.' '16-24 ft.' 'Less Than 8 ft.' '24+ ft.' 'Back Court Shot']'''
import matplotlib.cm as cm
plt.figure(figsize=(20, 10))
def scatter_plot_by_category(feat):
alpha = 0.1
gs = kobe.groupby(feat)
cs = cm.rainbow(np.linspace(0, 1, len(gs)))
for g, c in zip(gs, cs):
plt.scatter(g[1]["loc_x"], g[1]["loc_y"], color=c, alpha=alpha)
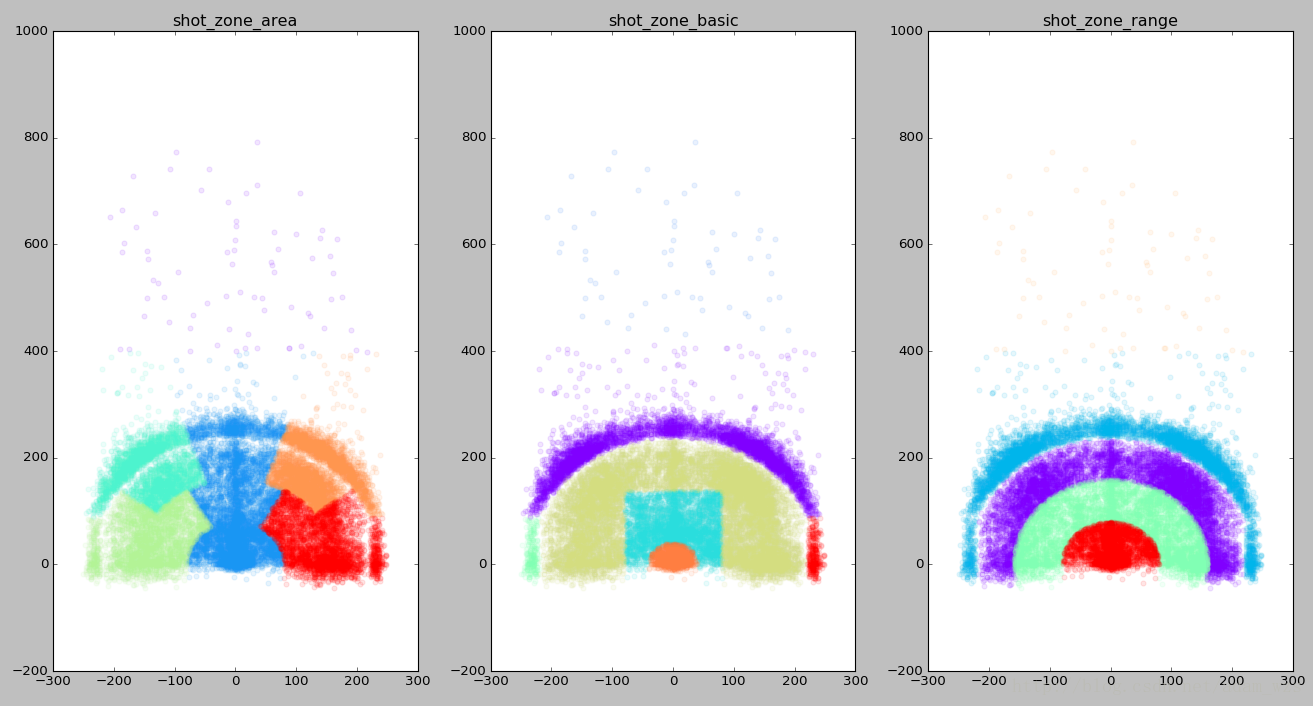
# # shot_zone_area
# plt.subplot(131)
# scatter_plot_by_category('shot_zone_area')
# plt.title('shot_zone_area')
#
# # shot_zone_basic
# plt.subplot(132)
# scatter_plot_by_category('shot_zone_basic')
# plt.title('shot_zone_basic')
#
# # shot_zone_range
# plt.subplot(133)
# scatter_plot_by_category('shot_zone_range')
# plt.title('shot_zone_range')
#
# plt.show()
drops = ['shot_id', 'team_id', 'team_name', 'shot_zone_area', 'shot_zone_range', 'shot_zone_basic',
'matchup', 'lon', 'lat', 'seconds_remaining', 'minutes_remaining',
'shot_distance', 'loc_x', 'loc_y', 'game_event_id', 'game_id', 'game_date']
for drop in drops:
raw.drop(drop, axis=1, inplace=True)
# print(raw.head())
'''
action_type combined_shot_type period playoffs season shot_made_flag shot_type opponent
0 Jump Shot Jump Shot 1 0 1 NaN 2PT Field Goal POR
1 Jump Shot Jump Shot 1 0 1 0.0 2PT Field Goal POR
2 Jump Shot Jump Shot 1 0 1 1.0 2PT Field Goal POR
3 Jump Shot Jump Shot 1 0 1 0.0 2PT Field Goal POR
4 Driving Dunk Shot Dunk 2 0 1 1.0 2PT Field Goal POR
'''
# print(raw['combined_shot_type'].value_counts())
# dummies_cs_type = pd.get_dummies(raw['combined_shot_type'], prefix='cs_type')
# raw = pd.concat([raw, dummies_cs_type], axis=1)
# raw = raw.drop("combined_shot_type", axis=1)
# print(raw.head())
categorical_vars = ['action_type', 'combined_shot_type', 'shot_type', 'opponent', 'period', 'season']
for var in categorical_vars:
raw = pd.concat([raw, pd.get_dummies(raw[var], prefix=var)], axis=1)
raw = raw.drop(var, 1)
print(raw.head())
train_kobe = raw[pd.notnull(raw['shot_made_flag'])]
train_label = train_kobe['shot_made_flag']
train_kobe = train_kobe.drop('shot_made_flag', axis=1)
test_kobe = raw[pd.isnull(raw['shot_made_flag'])]
test_kobe = test_kobe.drop('shot_made_flag', 1)
from sklearn.ensemble import RandomForestRegressor
from sklearn.metrics import confusion_matrix, log_loss
import time
import numpy as np
# find the best n_estimators for RandomForestClassifier
from sklearn.ensemble import RandomForestClassifier
from sklearn.cross_validation import KFold
print('Finding best n_estimators for RandomForestClassifier...')
min_score = 100000
best_n = 0
scores_n = []
range_n = np.logspace(0, 2, num=3).astype(int)
for n in range_n: # 树的个数
print("the number of trees : {0}".format(n))
t1 = time.time()
rfc_score = 0.
rfc = RandomForestClassifier(n_estimators=n)
for train_k, test_k in KFold(len(train_kobe), n_folds=10, shuffle=True):
rfc.fit(train_kobe.iloc[train_k], train_label.iloc[train_k])
# rfc_score += rfc.score(train.iloc[test_k], train_y.iloc[test_k])/10
pred = rfc.predict(train_kobe.iloc[test_k])
rfc_score += log_loss(train_label.iloc[test_k], pred) / 10
scores_n.append(rfc_score)
if rfc_score < min_score:
min_score = rfc_score
best_n = n
t2 = time.time()
print('Done processing {0} trees ({1:.3f}sec)'.format(n, t2 - t1))
print(best_n, min_score)
# find best max_depth for RandomForestClassifier
print('Finding best max_depth for RandomForestClassifier...')
min_score = 100000
best_m = 0
scores_m = []
range_m = np.logspace(0, 2, num=3).astype(int)
for m in range_m: # 树的深度
print("the max depth : {0}".format(m))
t1 = time.time()
rfc_score = 0.
rfc = RandomForestClassifier(max_depth=m, n_estimators=best_n)
for train_k, test_k in KFold(len(train_kobe), n_folds=10, shuffle=True):
rfc.fit(train_kobe.iloc[train_k], train_label.iloc[train_k])
# rfc_score += rfc.score(train.iloc[test_k], train_y.iloc[test_k])/10
pred = rfc.predict(train_kobe.iloc[test_k])
rfc_score += log_loss(train_label.iloc[test_k], pred) / 10
scores_m.append(rfc_score)
if rfc_score < min_score:
min_score = rfc_score
best_m = m
t2 = time.time()
print('Done processing {0} trees ({1:.3f}sec)'.format(m, t2 - t1))
print(best_m, min_score)
plt.figure(figsize=(10, 5))
plt.subplot(121)
plt.plot(range_n, scores_n)
plt.ylabel('score')
plt.xlabel('number of trees')
plt.subplot(122)
plt.plot(range_m, scores_m)
plt.ylabel('score')
plt.xlabel('max depth')
plt.show()
model = RandomForestClassifier(n_estimators=best_n, max_depth=best_m)
model.fit(train_kobe, train_label)















 3762
3762











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









