






前段时间和导航部门同事聊天,大致了解了目前公司的路径引擎,发现效率还是很低的。尽管最近几年没从事这方向的工作,但仍很表惊讶。所以分享个人对路网最优路径算法的认识,做个抽象的总结。
1 前言
关键字
1.1 路网
网络有很多种如社交网络、互联网络、交通路网等等。但是路网有它自己的特点:1、每个节点的度数不高 2、边有等级的划分 3、路网更新相对缓慢。正因为它自身的特点,学术界和行业设计了很多适用于路网特征的预处理算法。
1.2 最优路径
a、权重因子
最优路径的计算依赖的权重因子有很多类型,例如时间、长度等等。显然,权重因子不同,计算结果也会不一样
b、个性化最优路径
有人会说最优路径不是绝对的,因为任意给定的两点,每个人都会有自己的最优路径。所以最优路径与心理学有关,例如:路人甲更偏好高速路,路人乙更偏好畅通路,而路人丙更偏好沿途风景好的路。
不同的最优路径只是因为代价模型各异而已。对于给定的代价模型,最优路径都是确定的,甚至是唯一的。本文论及到的最优路径,即是给定的代价模型下的最优路径。
1.3 最优路径定理
对于给定的起点O和终点D,如果Path(O,a,b,c..D)是OD节点对的最优路径,那么Path沿途上,任意的两点间的最优路径也在Path上。
注意:反之是不成立的,例如:(a,b)节点对的最优路径是Path(a,b), (b,c)节点对的最优路径是Path(b,c),那么(a,c)节点对的最优路径不一定是Path(a,b,c)。如果a,b,c三个节点依次用三个城市武汉、西安、北京为例子,显然明白了。
2 算法
2.1 背景
流程三部曲:
a、从heap中弹出节点
b、更新当前的候选最优路径cost
c、从当前节点广度搜索展开,更新相邻节点的权重,加入heap中
伪代码如下:


void search() { while (needSearch()) { if (!popOpenSet()) { return; } updateRouterCost(); relaxConnectedEdges(); } }
为理解方便,图示如下,五角星分别表示起始和终止点,圈表示搜索范围,算法的时间复杂度和圈的面积成正比的。
单向搜索
2.2 迪杰斯特拉(Dijkstra)算法
终止条件:当heap弹出的点是终止点时
搜索范围图示如下:
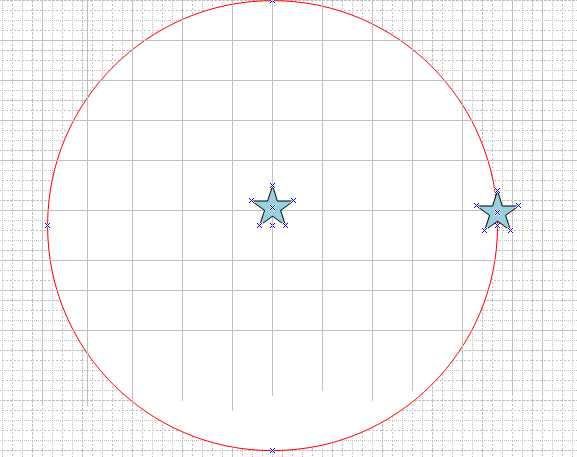
搜索范围:近似半径为r的红色圆圈,为了算法时间复杂度的对比,标记其耗时为1。
2.3 A-Star启发式算法
估价函数:取值当前搜索节点n到目的节点的直线距离。这样可以保证:如果最优路径经过节点n时,最优路径cost始终是大于当前节点n的估价最优值的。
终止条件:当heap弹出的点的估价值>当前候选最优路径cost值时,停止搜索。注意:A-Star算法是以估价值从小到大弹出来搜索的,所以第一次弹出目的节点时,不一定找到最优路径了,只能当成一条候选最优路径;然后继续搜索。
搜索范围图示如下:
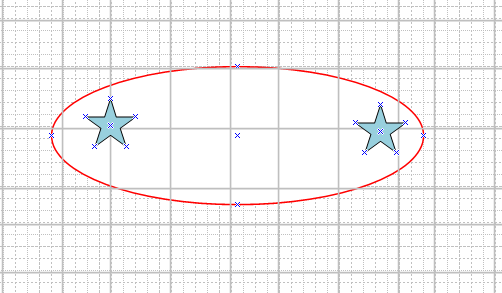
搜索范围:近似长轴为r/2的红色椭圆,标记耗时为1/8。
双向搜索
网上似乎少有相关资料证明双向Dijkstra算法和双向A-Star算法的终止条件和理论正确性,本文也仅用图文说明双向搜索的终止条件和正确性。
通常情况,最短路径搜索时我们会用到两个容器,一个堆(Heap):维护着已经reach到的候选节点集合;一个Map:维护已经从heap中弹出的节点集合。
图示如下:
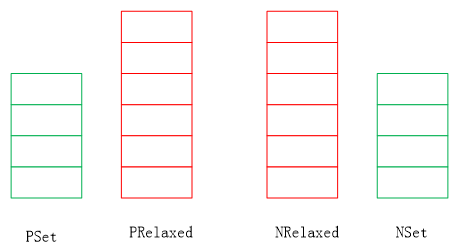
PSet和PRelaxed分别表示正向搜索的Map和Heap,NSet和NRelaxed分别表示反向搜索的Map和Heap。
2.4 双向Dijkstra算法
搜索范围图示如下:
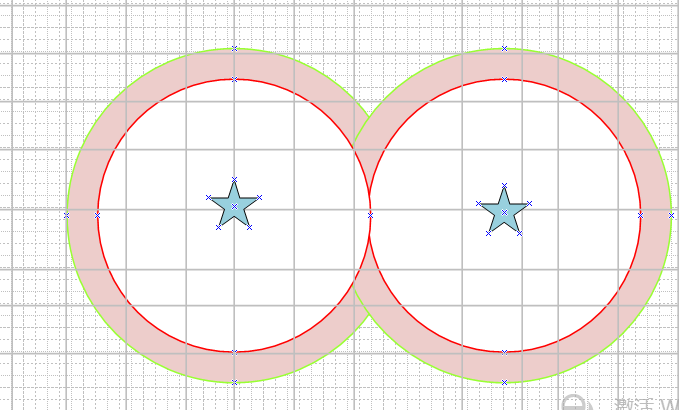
小圈表示PSet和NSet集合,大圈表示PRelaxed和NRelaxed集合。
终止条件:当PSet和NSet初次相遇节点时,获得了第一条候选最优路径时,继续进行双向搜索,但这时停止向heap放入新的节点,仅用弹出当前的PRelaxed和NRelaxed的集合,最优meet节点肯定在红色背景的节点集合中。
搜索范围:近似两个半径为r/2的圆,标记耗时为1/2。
2.5 双向A-Star算法
搜索范围图示如下: 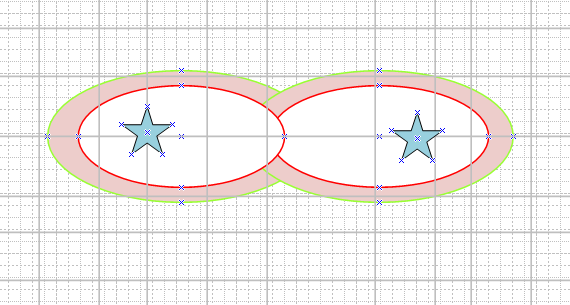
小椭圆圈表示PSet和NSet集合,大椭圆圈表示PRelaxed和NRelaxed集合。
终止条件:当PSet和NSet初次相遇节点时,获得了第一条候选最优路径时,继续进行双向搜索,如果一方向搜索从heap弹出节点时,发现当前节点的估价最优值大于当前的候选最优路径值时,则停止该方向的搜索。
搜索范围:近似两个长轴为r/4的椭圆范围,标记耗时为1/16。
3 总结
本文仅对最优路径基本算法作了抽象地分析,比较了最优路径算法的时间复杂度和说明了双向Dijkstra和双向A-Star搜索算法的理论可行性和正确性。如表达有误,欢迎交流讨论














 4205
4205











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









