







本篇讲解gpio的中断使用方式。
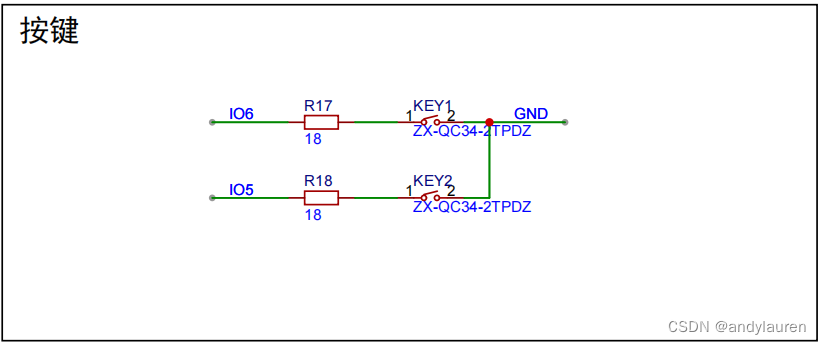
硬件原理图如下,与上一篇一样的电路
GPIO API
| API名称 | 说明 |
| hi_u32 hi_gpio_init(hi_void); | GPIO模块初始化 |
| hi_u32 hi_io_set_pull(hi_io_name id, hi_io_pull val); | 设置某个IO上下拉功能。 |
| hi_u32 hi_gpio_set_dir(hi_gpio_idx id, hi_gpio_dir dir); | 设置GPIO引脚方向,id参数用于指定引脚,dir参数用于指定输入或输出 |
| hi_u32 hi_gpio_get_input_val(hi_gpio_idx id, hi_gpio_value* val); | 获取某个IO管脚输入电平状态 |
| hi_u32 hi_gpio_register_isr_function(hi_gpio_idx id, hi_gpio_int_type int_type, hi_gpio_int_polarity int_polarity, gpio_isr_callback func, hi_void *arg); | 使能某个GPIO的中断功能 |
修改D:\DevEcoProjects\test\src\vendor\rtplay\rt_hi3861\demo\BUILD.gn文件
# Copyright (c) 2023 Beijing HuaQing YuanJian Education Technology Co., Ltd
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# You may obtain a copy of the License at
#
# http://www.apache.org/licenses/LICENSE-2.0
#
# Unless required by applicable law or agreed to in writing, software
# distributed under the License is distributed on an "AS IS" BASIS,
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
# See the License for the specific language governing permissions and
# limitations under the License.
import("//build/lite/config/component/lite_component.gni")
lite_component("demo") {
features = [
#"base_00_helloworld:base_helloworld_example",
#"base_01_led:base_led_example",
#"base_02_loopkey:base_loopkey_example",
"base_03_irqkey:base_irqkey_example",
]
}
创建D:\DevEcoProjects\test\src\vendor\rtplay\rt_hi3861\demo\base_03_irqkey文件夹
文件夹中创建D:\DevEcoProjects\test\src\vendor\rtplay\rt_hi3861\demo\base_03_irqkey\base_irqkey_example.c文件D:\DevEcoProjects\test\src\vendor\rtplay\rt_hi3861\demo\base_03_irqkey\BUILD.gn文件
# Copyright (c) 2023 Beijing HuaQing YuanJian Education Technology Co., Ltd
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# You may obtain a copy of the License at
#
# http://www.apache.org/licenses/LICENSE-2.0
#
# Unless required by applicable law or agreed to in writing, software
# distributed under the License is distributed on an "AS IS" BASIS,
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
# See the License for the specific language governing permissions and
# limitations under the License.
static_library("base_irqkey_example") {
sources = [
"base_irqkey_example.c",
]
include_dirs = [
"//utils/native/lite/include",
"//kernel/liteos_m/kal/cmsis",
"//base/iot_hardware/peripheral/interfaces/kits",
"//vendor/hqyj/fs_hi3861/common/bsp/include"
]
}/*
* Copyright (c) 2023 Beijing HuaQing YuanJian Education Technology Co., Ltd
* Licensed under the Apache License, Version 2.0 (the "License");
* you may not use this file except in compliance with the License.
* You may obtain a copy of the License at
*
* http://www.apache.org/licenses/LICENSE-2.0
*
* Unless required by applicable law or agreed to in writing, software
* distributed under the License is distributed on an "AS IS" BASIS,
* WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
* See the License for the specific language governing permissions and
* limitations under the License.
*/
#include <stdio.h>
#include <unistd.h>
#include "cmsis_os2.h"
#include "hi_gpio.h"
#include "hi_io.h"
#include "ohos_init.h"
#define KEY1 HI_IO_NAME_GPIO_6 // 对应按键key1
#define KEY2 HI_IO_NAME_GPIO_5 // 对应按键key2
osThreadId_t Task1_ID = 0; // 任务1 ID
hi_gpio_value val, val_last; // GPIO的状态值
#define TASK_STACK_SIZE 1024
#define TASK_DELAY_TIME (200 * 1000)
/**
* @brief 按键中断回调函数
* @note 当按键按下的时候才会触发
* @param *arg:
* @retval None
*/
hi_void key1_callback(void)
{
printf("key1 down...\r\n");
hi_gpio_get_input_val(KEY1, &val); // 获取GPIO引脚的状态
printf("key1_callback: %s\r\n", val ? "HI_GPIO_VALUE_1" : "HI_GPIO_VALUE_0");
}
hi_void key2_callback(void)
{
printf("key2 down...\r\n");
hi_gpio_get_input_val(KEY2, &val); // 获取GPIO引脚的状态
printf("key2_callback: %s\r\n", val ? "HI_GPIO_VALUE_1" : "HI_GPIO_VALUE_0");
}
/**
* @description: 任务1
* @param {*}
* @return {*}
*/
void Task1(void)
{
printf("enter Task 1.......\r\n");
hi_gpio_init(); // GPIO初始化
hi_io_set_pull(KEY1, HI_IO_PULL_UP); // 设置GPIO上拉
hi_io_set_func(KEY1, HI_IO_FUNC_GPIO_6_GPIO); // 设置IO14为GPIO功能
hi_gpio_set_dir(KEY1, HI_GPIO_DIR_IN); // 设置GPIO为输入模式
hi_gpio_register_isr_function(KEY1, // KEY按键引脚
HI_INT_TYPE_EDGE, // 下降沿检测
HI_GPIO_EDGE_FALL_LEVEL_LOW, // 低电平时触发
&key1_callback, // 触发后调用的回调函数
NULL); // 回调函数的传参值
hi_io_set_pull(KEY2, HI_IO_PULL_UP); // 设置GPIO上拉
hi_io_set_func(KEY2, HI_IO_FUNC_GPIO_6_GPIO); // 设置IO14为GPIO功能
hi_gpio_set_dir(KEY2, HI_GPIO_DIR_IN); // 设置GPIO为输入模式
hi_gpio_register_isr_function(KEY2, // KEY按键引脚
HI_INT_TYPE_EDGE, // 下降沿检测
HI_GPIO_EDGE_FALL_LEVEL_LOW, // 低电平时触发
&key2_callback, // 触发后调用的回调函数
NULL); // 回调函数的传参值
while (1) {
// 200ms一检测
usleep(TASK_DELAY_TIME); // 200ms sleep
}
}
/**
* @description: 初始化并创建任务
* @param {*}
* @return {*}
*/
static void base_key_demo(void)
{
printf("[demo] Enter base_key_demo()!\r\n");
osThreadAttr_t taskOptions;
taskOptions.name = "Task1"; // 任务的名字
taskOptions.attr_bits = 0; // 属性位
taskOptions.cb_mem = NULL; // 堆空间地址
taskOptions.cb_size = 0; // 堆空间大小
taskOptions.stack_mem = NULL; // 栈空间地址
taskOptions.stack_size = TASK_STACK_SIZE; // 栈空间大小 单位:字节
taskOptions.priority = osPriorityNormal; // 任务的优先级:wq
Task1_ID = osThreadNew((osThreadFunc_t)Task1, NULL, &taskOptions); // 创建任务1
if (Task1_ID != NULL) {
printf("ID = %d, Create Task1_ID is OK!\r\n", Task1_ID);
}
}
SYS_RUN(base_key_demo);
目录结构
│ config.json
│
├─common
│ └─bsp
│ ├─include
│ └─src
├─demo
│ │ BUILD.gn
│ │
│ ├─base_00_helloworld
│ │ base_helloworld_example.c
│ │ BUILD.gn
│ │
│ ├─base_01_led
│ │ base_led_example.c
│ │ BUILD.gn
│ │
│ ├─base_02_loopkey
│ │ base_loopkey_example.c
│ │ BUILD.gn
│ │
│ └─base_03_irqkey
│ base_irqkey_example.c
│ BUILD.gn
│
└─doc
│ HarmonyOS开发板实验指导书 v2.1.pdf
│ 华清远见 FS_Hi3861开发指导.md
│ 华清远见 FS_Hi3861新手入门手册.md
│
├─board
│ FS-Hi3861-V4.2.pdf
│ FS-Hi3861QDB-V3.2.pdf
│ hi-12f_kit_v1.1.0A7E6BCB9%A6-20211025.pdf
│ hi-12f_v1.1.2-A7E6BCB9%A6-20211202.pdf
│ nodemcu-hi-07s_12f-kit_v1.1-20210913.pdf
│ RTplay2.01_2024-06-14.pdf
│
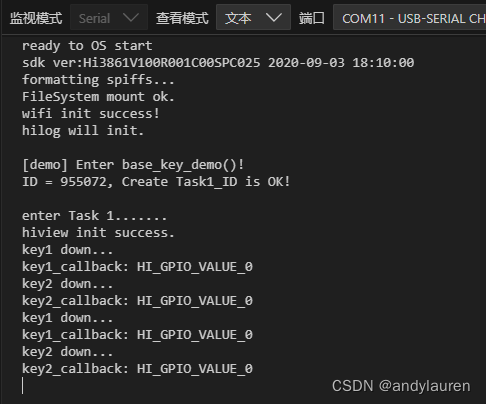
└─figures使用build,编译成功后,使用upload进行烧录。
运行效果如下,按下按键会有对应按键状态输出。















 1464
1464











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









