







http://my.oschina.net/moooofly/blog/143883
熟悉 RabbitMQ 的人肯定知道 no_ack 属性是在调用 Basic.Consume 方法时可以设置的一个重要参数。本文主要针对 no_ack 设置的两种情况,通过抓包分析的形式讲解下实际应用中的异同,并总结一下相关的处理经验。
============ 我是分隔线 =============
no_ack 的用途:确保 message 被 consumer “成功”处理了。这里“成功”的意思是,(在设置了 no_ack=false 的情况下)只要 consumer 手动应答了 Basic.Ack ,就算其“成功”处理了。
情况一:no_ack=true (此时为自动应答)
在这种情况下,consumer 会在接收到 Basic.Deliver + Content-Header + Content-Body 之后,立即回复 Ack 。而这个 Ack 是 TCP 协议中的 Ack 。此 Ack 的回复不关心 consumer 是否对接收到的数据进行了处理,当然也不关心处理数据所需要的耗时。
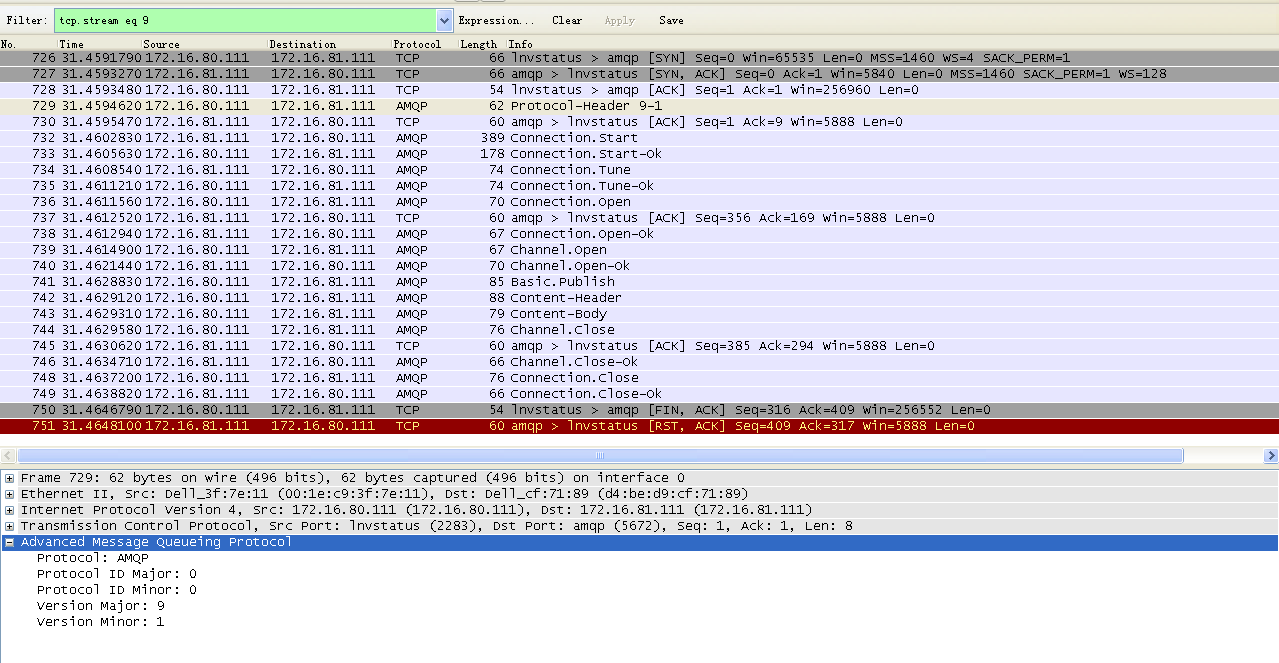
图1:(Producer+Consumer)

图2:(Consumer)

图3:(Producer)
情况二:no_ack=false (此时为手动应答)
在这种情况下,要求 consumer 在处理完接收到的 Basic.Deliver + Content-Header + Content-Body 之后才回复 Ack 。而这个 Ack 是 AMQP 协议中的 Basic.Ack 。此 Ack 的回复是和业务处理相关的,所以具体的回复时间应该要取决于业务处理的耗时。
图4:(Producer+Consumer)

图5:(Consumer)

图6:(Producer)

总结:
- Basic.Ack 发回给 RabbitMQ 以告知,可以将相应 message 从 RabbitMQ 的消息缓存中移除。
- Basic.Ack 未被 consumer 发回给 RabbitMQ 前出现了异常,RabbitMQ 发现与该 consumer 对应的连接被断开,之后将该 message 以轮询方式发送给其他 consumer (假设存在多个 consumer 订阅同一个 queue)。
- 在 no_ack=true 的情况下,RabbitMQ 认为 message 一旦被 deliver 出去了,就已被确认了,所以会立即将缓存中的 message 删除。所以在 consumer 异常时会导致消息丢失。
- 来自 consumer 侧的 Basic.Ack 与 发送给 Producer 侧的 Basic.Ack 没有直接关系。
============ 我是分隔线 =============
最后贴上自己改造的、基于 libevent 实现的 rabbitmq-c 的测试打印。
情况一:
[warn] evsignal_init: socketpair: No error
drive_machine: [conn_init] --- in TCP 3-way connecting!
drive_machine: [conn_connecting] --- connection timeout 1 time on socket(6040)
drive_machine: [conn_connected] --- connected on socket(6040)
6040: conn_state change connected ==> snd_protocol_header
--> Send Protocol.Header!
6040: conn_state change snd_protocol_header ==> rcv_connection_start_method
<-- Recv Connection.Start Method frame!
6040: conn_state change rcv_connection_start_method ==> snd_connection_start_rsp_method
--> Send Connection.Start-Ok Method frame!
6040: conn_state change snd_connection_start_rsp_method ==> rcv_connection_tune_method
<-- Recv Connection.Tune Method frame!
6040: conn_state change rcv_connection_tune_method ==> snd_connection_tune_rsp_method
--> Send Connection.Tune-Ok Method frame!
6040: conn_state change snd_connection_tune_rsp_method ==> snd_connection_open_method
--> Send Connection.Open Method frame!
6040: conn_state change snd_connection_open_method ==> rcv_connection_open_rsp_method
<-- Recv Connection.Open-Ok Method frame!
6040: conn_state change rcv_connection_open_rsp_method ==> snd_channel_open_method
--> Send Channel.Open Method frame!
6040: conn_state change snd_channel_open_method ==> rcv_channel_open_rsp_method
<-- Recv Channel.Open-Ok Method frame!
6040: conn_state change rcv_channel_open_rsp_method ==> idle
drive_machine: [conn_idle] --- [CONSUMER]: Queue Declaring!
6040: conn_state change idle ==> snd_queue_declare_method
--> Send Queue.Declare Method frame!
6040: conn_state change snd_queue_declare_method ==> rcv_queue_declare_rsp_method
<-- Recv Queue.Declare-Ok Method frame!
6040: conn_state change rcv_queue_declare_rsp_method ==> idle
drive_machine: [conn_idle] --- [CONSUMER]: Queue Binding!
6040: conn_state change idle ==> snd_queue_bind_method
--> Send Queue.Bind Method frame!
6040: conn_state change snd_queue_bind_method ==> rcv_queue_bind_rsp_method
<-- Recv Queue.Bind-Ok Method frame!
6040: conn_state change rcv_queue_bind_rsp_method ==> idle
drive_machine: [conn_idle] --- [CONSUMER]: Basic QoS!
6040: conn_state change idle ==> snd_basic_qos_method
--> Send Basic.Qos Method frame!
6040: conn_state change snd_basic_qos_method ==> rcv_basic_qos_rsp_method
<-- Recv Basic.Qos-Ok Method frame!
6040: conn_state change rcv_basic_qos_rsp_method ==> idle
drive_machine: [conn_idle] --- [CONSUMER]: Basic Consuming!
6040: conn_state change idle ==> snd_basic_consume_method
--> Send Basic.Consume Method frame!
6040: conn_state change snd_basic_consume_method ==> rcv_basic_consume_rsp_method
<-- Recv Basic.Consume-Ok Method frame!
6040: conn_state change rcv_basic_consume_rsp_method ==> idle
drive_machine: [conn_idle] --- [CONSUMER]: Start waiting to recv!
6040: conn_state change idle ==> rcv_basic_deliver_method
drive_machine: wait for Basic.Deliver method another 10 seconds!!
drive_machine: wait for Basic.Deliver method another 10 seconds!!
<-- Recv Basic.Deliver Method frame!
6040: conn_state change rcv_basic_deliver_method ==> rcv_basic_content_header
<-- Recv Content.Header frame!
6040: conn_state change rcv_basic_content_header ==> rcv_basic_content_body
<-- Recv Content.Body frame!
Content Body is [Hello World betty].
@@@ CB: body len : [17] body : [Hello World betty]
6040: conn_state change rcv_basic_content_body ==> idle
drive_machine: [conn_idle] --- [CONSUMER]: Start waiting to recv!
6040: conn_state change idle ==> rcv_basic_deliver_method
drive_machine: wait for Basic.Deliver method another 10 seconds!!
drive_machine: wait for Basic.Deliver method another 10 seconds!!情况二:
[warn] evsignal_init: socketpair: No error
drive_machine: [conn_init] --- in TCP 3-way connecting!
drive_machine: [conn_connecting] --- connection timeout 1 time on socket(6040)
drive_machine: connected on socket(6040)
6040: conn_state change connected ==> snd_protocol_header
--> Send Protocol.Header!
6040: conn_state change snd_protocol_header ==> rcv_connection_start_method
<-- Recv Connection.Start Method frame!
6040: conn_state change rcv_connection_start_method ==> snd_connection_start_rsp_method
--> Send Connection.Start-Ok Method frame!
6040: conn_state change snd_connection_start_rsp_method ==> rcv_connection_tune_method
<-- Recv Connection.Tune Method frame!
6040: conn_state change rcv_connection_tune_method ==> snd_connection_tune_rsp_method
--> Send Connection.Tune-Ok Method frame!
6040: conn_state change snd_connection_tune_rsp_method ==> snd_connection_open_method
--> Send Connection.Open Method frame!
6040: conn_state change snd_connection_open_method ==> rcv_connection_open_rsp_method
<-- Recv Connection.Open-Ok Method frame!
6040: conn_state change rcv_connection_open_rsp_method ==> snd_channel_open_method
--> Send Channel.Open Method frame!
6040: conn_state change snd_channel_open_method ==> rcv_channel_open_rsp_method
<-- Recv Channel.Open-Ok Method frame!
6040: conn_state change rcv_channel_open_rsp_method ==> idle
drive_machine: [conn_idle] --- [CONSUMER]: Queue Declaring!
6040: conn_state change idle ==> snd_queue_declare_method
--> Send Queue.Declare Method frame!
6040: conn_state change snd_queue_declare_method ==> rcv_queue_declare_rsp_method
<-- Recv Queue.Declare-Ok Method frame!
6040: conn_state change rcv_queue_declare_rsp_method ==> idle
drive_machine: [conn_idle] --- [CONSUMER]: Queue Binding!
6040: conn_state change idle ==> snd_queue_bind_method
--> Send Queue.Bind Method frame!
6040: conn_state change snd_queue_bind_method ==> rcv_queue_bind_rsp_method
<-- Recv Queue.Bind-Ok Method frame!
6040: conn_state change rcv_queue_bind_rsp_method ==> idle
drive_machine: [conn_idle] --- [CONSUMER]: Basic QoS!
6040: conn_state change idle ==> snd_basic_qos_method
--> Send Basic.Qos Method frame!
6040: conn_state change snd_basic_qos_method ==> rcv_basic_qos_rsp_method
<-- Recv Basic.Qos-Ok Method frame!
6040: conn_state change rcv_basic_qos_rsp_method ==> idle
drive_machine: [conn_idle] --- [CONSUMER]: Basic Consuming!
6040: conn_state change idle ==> snd_basic_consume_method
--> Send Basic.Consume Method frame!
6040: conn_state change snd_basic_consume_method ==> rcv_basic_consume_rsp_method
<-- Recv Basic.Consume-Ok Method frame!
6040: conn_state change rcv_basic_consume_rsp_method ==> idle
drive_machine: [conn_idle] --- [CONSUMER]: Start waiting to recv!
6040: conn_state change idle ==> rcv_basic_deliver_method
drive_machine: wait for Basic.Deliver method another 10 seconds!!
drive_machine: wait for Basic.Deliver method another 10 seconds!!
drive_machine: wait for Basic.Deliver method another 10 seconds!!
<-- Recv Basic.Deliver Method frame!
6040: conn_state change rcv_basic_deliver_method ==> rcv_basic_content_header
<-- Recv Content.Header frame!
6040: conn_state change rcv_basic_content_header ==> rcv_basic_content_body
<-- Recv Content.Body frame!
Content Body is [Hello World betty].
@@@ CB: body len : [17] body : [Hello World betty]
6040: conn_state change rcv_basic_content_body ==> snd_basic_ack_method
--> Send Basic.Ack Method frame!
6040: conn_state change snd_basic_ack_method ==> idle
drive_machine: [conn_idle] --- [CONSUMER]: Start waiting to recv!
6040: conn_state change idle ==> rcv_basic_deliver_method
drive_machine: wait for Basic.Deliver method another 10 seconds!!
drive_machine: wait for Basic.Deliver method another 10 seconds!!














 826
826

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









