







1.KCF算法介绍
KCF全称为Kernel Correlation Filter 核相关滤波算法,在目标跟踪效果和速度上都非常好,OpenCV里面有完整的kcf算法,海思平台的IVE也硬化了KCF算法,接口和调用流程基本都一致;
SS928 SDK里面关于kcf算法的文档在
SS928V100R001C02SPC022\ReleaseDoc\zh\01.software\board\SVP\IVE API 参考.pdf KCF相关接口
代码路径
SS928V100_SDK_V2.0.2.2/smp/a55_linux/mpp/sample/svp/ive
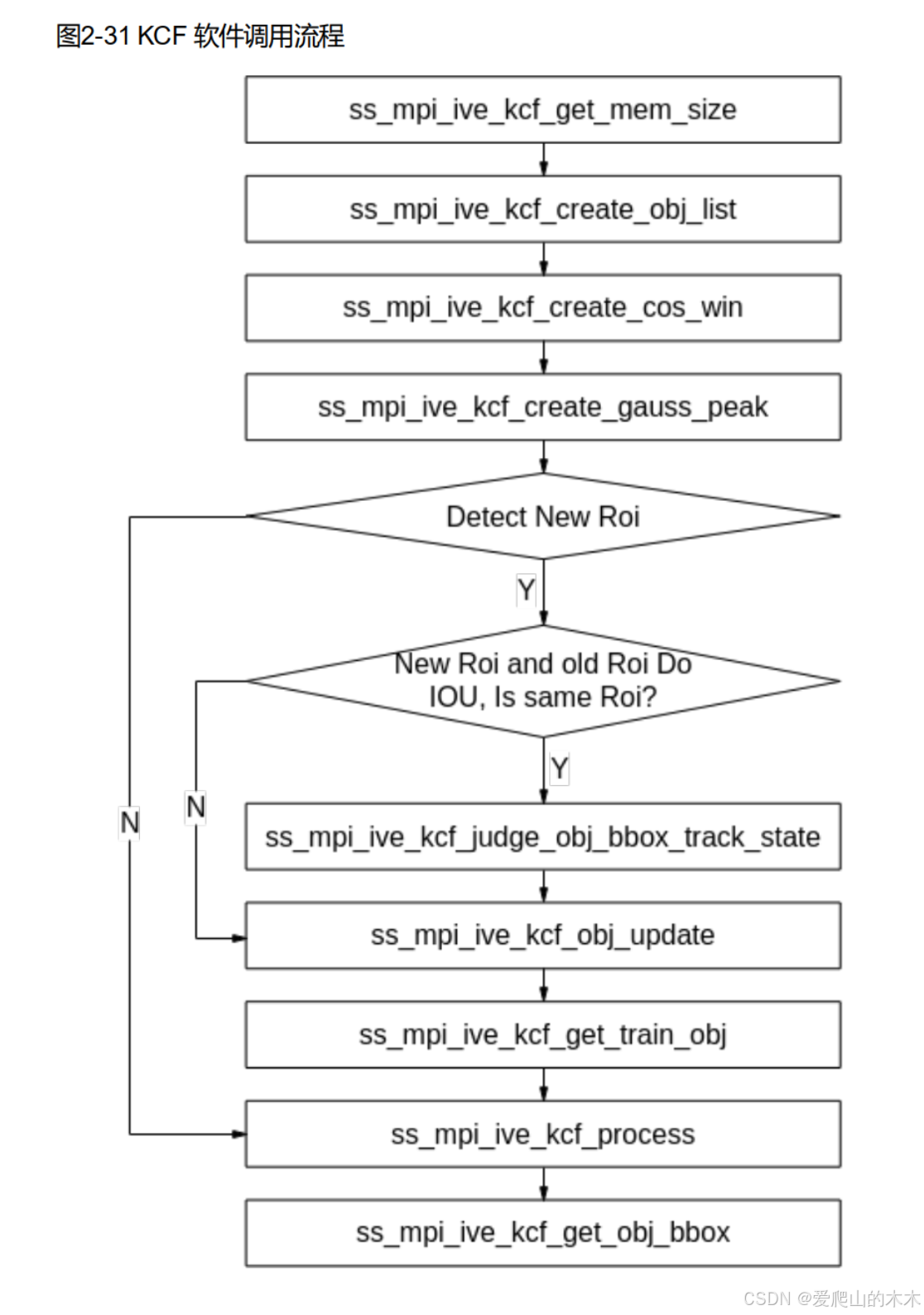
2.KCF算法关键流程
2.1 KCF流程介绍
参IVE_API参考.pdf ss_mpi_ive_kcf_proc
2.2 KCF关键实现代码
主要是分配MMZ内存,具体每个结构体需要的内存大小,可以参考api文档对应描述
在这里插入代码片static td_void sample_ive_kcf_info_common_init(st_ot_sample_ive_kcf_info* kcf_info, td_u32 size)
{
kcf_info->list_mem.phys_addr = kcf_info->total_mem.phys_addr;
kcf_info->list_mem.virt_addr = kcf_info->total_mem.virt_addr;
kcf_info->list_mem.size = size;
kcf_info->gauss_peak.phys_addr = kcf_info->list_mem.phys_addr + size;
kcf_info->gauss_peak.virt_addr = kcf_info->list_mem.virt_addr + size;
kcf_info->gauss_peak.size = OT_SAMPLE_IVE_KCF_GAUSS_PEAK_TOTAL_SIZE;
kcf_info->cos_win_x.phys_addr = kcf_info->gauss_peak.phys_addr + OT_SAMPLE_IVE_KCF_GAUSS_PEAK_TOTAL_SIZE;
kcf_info->cos_win_x.virt_addr = kcf_info->gauss_peak.virt_addr + OT_SAMPLE_IVE_KCF_GAUSS_PEAK_TOTAL_SIZE;
kcf_info->cos_win_x.size = OT_SAMPLE_IVE_KCF_COS_WINDOW_TOTAL_SIZE;
kcf_info->cos_win_y.phys_addr = kcf_info->cos_win_x.phys_addr + OT_SAMPLE_IVE_KCF_COS_WINDOW_TOTAL_SIZE;
kcf_info->cos_win_y.virt_addr = kcf_info->cos_win_x.virt_addr + OT_SAMPLE_IVE_KCF_COS_WINDOW_TOTAL_SIZE;
kcf_info->cos_win_y.size = OT_SAMPLE_IVE_KCF_COS_WINDOW_TOTAL_SIZE;
kcf_info->kcf_proc_ctrl.tmp_buf.phys_addr = kcf_info->cos_win_y.phys_addr +
OT_SAMPLE_IVE_KCF_COS_WINDOW_TOTAL_SIZE;
kcf_info->kcf_proc_ctrl.tmp_buf.virt_addr = kcf_info->cos_win_y.virt_addr +
OT_SAMPLE_IVE_KCF_COS_WINDOW_TOTAL_SIZE;
kcf_info->kcf_proc_ctrl.tmp_buf.size = OT_SAMPLE_IVE_KCF_TEMP_BUF_SIZE;
kcf_info->kcf_proc_ctrl.csc_mode = OT_IVE_CSC_MODE_VIDEO_BT709_YUV_TO_RGB;
kcf_info->kcf_proc_ctrl.interp_factor = OT_SAMPLE_IVE_KCF_INTERP_FACTOR;
kcf_info->kcf_proc_ctrl.lamda = OT_SAMPLE_IVE_KCF_LAMDA;
kcf_info->kcf_proc_ctrl.sigma = OT_SAMPLE_IVE_KCF_SIGMA;
kcf_info->kcf_proc_ctrl.norm_trunc_alfa = OT_SAMPLE_IVE_KCF_NORM_TRUNC_ALFA;
kcf_info->kcf_proc_ctrl.response_threshold = OT_SAMPLE_IVE_KCF_RESP_THR;
kcf_info->padding = OT_SAMPLE_IVE_KCF_PADDING;
kcf_info->kcf_bbox_ctrl.max_bbox_num = OT_SAMPLE_IVE_KCF_NODE_MAX_NUM;
kcf_info->kcf_bbox_ctrl.response_threshold = 0;
}
void init_kcf()
{
td_s32 ret = OT_ERR_IVE_NULL_PTR;
(td_void)memset_s(&kcf_info, sizeof(st_ot_sample_ive_kcf_info), 0, sizeof(st_ot_sample_ive_kcf_info));
td_u32 total_size;
td_u32 size;
ret = ss_mpi_ive_kcf_get_mem_size(OT_SAMPLE_IVE_KCF_NODE_MAX_NUM, &size);
/* (HOGFeatrue + Alpha + DstBuf) + Guasspeak + CosWinX + CosWinY + TmpBuf */
total_size = size + OT_SAMPLE_IVE_KCF_GAUSS_PEAK_TOTAL_SIZE + OT_SAMPLE_IVE_KCF_COS_WINDOW_TOTAL_SIZE *
OT_SAMPLE_NUM_TWO + OT_SAMPLE_IVE_KCF_TEMP_BUF_SIZE;
ret = sample_common_ive_create_mem_info(&kcf_info.total_mem, total_size);
(td_void)memset_s((td_u8*)(td_uintptr_t)kcf_info.total_mem.virt_addr, total_size, 0x0, total_size);
sample_ive_kcf_info_common_init(&kcf_info, size);
ret = ss_mpi_ive_kcf_create_obj_list(&kcf_info.list_mem, OT_SAMPLE_IVE_KCF_NODE_MAX_NUM, &kcf_info.obj_list);
ret = ss_mpi_ive_kcf_create_gauss_peak(kcf_info.padding, &kcf_info.gauss_peak);
ret = ss_mpi_ive_kcf_create_cos_win(&kcf_info.cos_win_x, &kcf_info.cos_win_y);
kcf_info.is_first_det = TD_FALSE;
kcf_info.needTrain = TD_FALSE;
}
代码调用流程,初始化kcf后,会根据用户的坐标刷新跟踪区域
pthread_t kcf_pid;
pthread_t WebStream_pid;
int running = 0;
void* kcf_proc(void* parg)
{
td_s32 milli_sec = 40;
td_s32 ret;
ot_vpss_grp grp = 0;
ot_vpss_chn chn = 0;
ot_video_frame_info frame_info;
kcf_info.is_train = TD_FALSE;
kcf_info.needTrain = TD_FALSE;
ot_ive_handle handle;
ot_ive_kcf_bbox bbox;
static ot_sample_ive_kcf_bbox_info bbox_info = { 0 };
static ot_sample_ive_kcf_roi_info roi_info = { 0 };
static ot_sample_ive_kcf_roi_info new_roi_info = { 0 };
init_kcf();
while (running)
{
ot_usleep(1000);
ret = ss_mpi_vpss_get_chn_frame(grp, chn, &frame_info, milli_sec);
if (ret != TD_SUCCESS) {
continue;
}
int w = frame_info.video_frame.width;
int h = frame_info.video_frame.height;
ot_svp_src_img src;
src.width = w;
src.height = h;
src.phys_addr[0] = frame_info.video_frame.phys_addr[0];
src.phys_addr[1] = frame_info.video_frame.phys_addr[1];
src.phys_addr[2] = frame_info.video_frame.phys_addr[2];
src.stride[0] = frame_info.video_frame.stride[0];
src.stride[1] = frame_info.video_frame.stride[1];
src.stride[2] = frame_info.video_frame.stride[2];
src.type = OT_SVP_IMG_TYPE_YUV420SP;
int framelen = w * h * 3 / 2;
if (kcf_info.is_train)
{
if (kcf_info.obj_list.track_obj_num != 0 || kcf_info.obj_list.train_obj_num != 0)
{
memset(&bbox_info, 0, sizeof(ot_sample_ive_kcf_bbox_info));
ret = ss_mpi_ive_kcf_proc(&handle, &src, &kcf_info.obj_list, &kcf_info.kcf_proc_ctrl, TD_TRUE);
ret = sample_ive_kcf_query_task(handle);
ret = ss_mpi_ive_kcf_get_obj_bbox(&kcf_info.obj_list, bbox_info.bbox, &bbox_info.bbox_num, &kcf_info.kcf_bbox_ctrl);
printf("bbox_info.bbox_num:%d \n", bbox_info.bbox_num);
ot_sample_svp_rect_info rect = { 0 };
sample_ive_rect_to_point(bbox_info.bbox, bbox_info.bbox_num, &rect);
if (rect.num)
{
int x = rect.rect[0].point[0].x;
int y = rect.rect[0].point[0].y;
int w = rect.rect[0].point[1].x - rect.rect[0].point[0].x;
int h = rect.rect[0].point[2].y - rect.rect[0].point[0].y;
// printf(" %d %d %d %d\n", x, y, w, h);
vgsdraw(&frame_info, x, y, w, h);
}
}
}
if (kcf_info.needTrain)
{
memset(&bbox_info, 0, sizeof(ot_sample_ive_kcf_bbox_info));
kcf_info.needTrain = TD_FALSE;
roi_info.roi[0].roi.x = kcf_info.Kcf_x * w * OT_SAMPLE_QUARTER_OF_1M;
roi_info.roi[0].roi.y = kcf_info.Kcf_y * h * OT_SAMPLE_QUARTER_OF_1M;
roi_info.roi[0].roi.width = kcf_info.Kcf_w * w;
roi_info.roi[0].roi.height = kcf_info.Kcf_h * h;
roi_info.roi_num = 1;
new_roi_info.roi[0].roi.x = kcf_info.Kcf_x * OT_SAMPLE_QUARTER_OF_1M;
new_roi_info.roi[0].roi.y = kcf_info.Kcf_y * h * OT_SAMPLE_QUARTER_OF_1M;
new_roi_info.roi[0].roi.width = kcf_info.Kcf_w * w;
new_roi_info.roi[0].roi.height = kcf_info.Kcf_h * h;
new_roi_info.roi_num = 1;
sample_ive_kcf_obj_iou(&roi_info, &bbox_info, OT_SAMPLE_IVE_KCF_ROI_NUM, &new_roi_info);
ret = ss_mpi_ive_kcf_obj_update(&kcf_info.obj_list, bbox_info.bbox, bbox_info.bbox_num);
ret = ss_mpi_ive_kcf_get_train_obj(kcf_info.padding, &new_roi_info.roi, new_roi_info.roi_num, &kcf_info.cos_win_x, &kcf_info.cos_win_y, &kcf_info.gauss_peak, &kcf_info.obj_list);
printf("ss_mpi_ive_kcf_get_train_obj %s %d %08x \n", __FUNCTION__, __LINE__, ret);
kcf_info.is_train = TD_TRUE;
}
ret = ss_mpi_vo_send_frame(0, 0, &frame_info, milli_sec);
ret = ss_mpi_venc_send_frame(0, &frame_info, milli_sec);
ss_mpi_vpss_release_chn_frame(grp, chn, &frame_info);
}
return NULL;
}
2.3 完整Demo代码
https://gitee.com/apchy_ll/ss928_kcf_demo.git
2.4 项目讲解+跟踪效果
10 KCF跟踪算法效果Demo
3.项目其它功能介绍
3.1 WebStream
WebStream用的flv方案,大概原理是吧编码的视频数据封装为flv packet,送给HttpServer,httpserver处理掉了flv的http请求,把封装的flvpack 通过http rsq的方式返回给浏览器,浏览器就可以通过flv.js播放视频,目前只支持h264部分,flv的封装使用的libflv库,httpserver用的mongoose
httpflv核心的地方需要处理http rsq 为Connection: Keep-Alive和Transfer-Encoding: chunked
void NetServer::AddFlvSession(struct mg_connection* nc,
struct http_message* hm) {
std::lock_guard<std::mutex> lk(mutex_);
mg_printf(nc,
"HTTP/1.1 200 OK\r\n"
"Content-Type: video/x-flv\r\n"
"Connection: Keep-Alive\r\n"
"Transfer-Encoding: chunked\r\n\r\n");
SendFlvHeaderTag(nc);
stflvSessionInfo* pSession =
(stflvSessionInfo*)malloc(sizeof(stflvSessionInfo));
memcpy(pSession->url, hm->uri.p, hm->uri.len);
pSession->queue = new std::list<std::string>;
pSession->mutex = new std::mutex;
flv_conn_map_[nc] = (void*)pSession;
pSession->m = CreateFlvMuxer(pSession);
}
flv.js Web端的实现,参考flv.js官网的项目
3.2 用户画框的流程
画框就是在html上用canvas 响应了鼠标消息,绘制线条,然后通过post http://ip:80/setpos 接口把数据发送给httpserver,参考WWW目录index.html
function postData(ratioX, ratioY, ratioWidth, ratioHeight) {
const xhr = new XMLHttpRequest();
xhr.open('POST', '/setpos');
xhr.setRequestHeader('Content-Type', 'application/json;charset=UTF-8');
const data = {
x: parseFloat(ratioX).toFixed(2) * 1,
y: parseFloat(ratioY).toFixed(2) * 1,
w: parseFloat(ratioWidth).toFixed(2) * 1,
h: parseFloat(ratioHeight).toFixed(2) * 1
};
xhr.send(JSON.stringify(data));
}


















 809
809

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











