







前两天用网上某个opencv带的kalman滤波追踪鼠标点的程序改编了一下,给定一组轨迹上的点,预测下一时刻点的位置。用的转移矩阵是
[1 0 1 0 ;
0 1 0 1;
0 0 1 0;
0 0 0 1]
(匀速直线运动)在轨迹的是有好多个弯的曲线的时候,会有滞后。
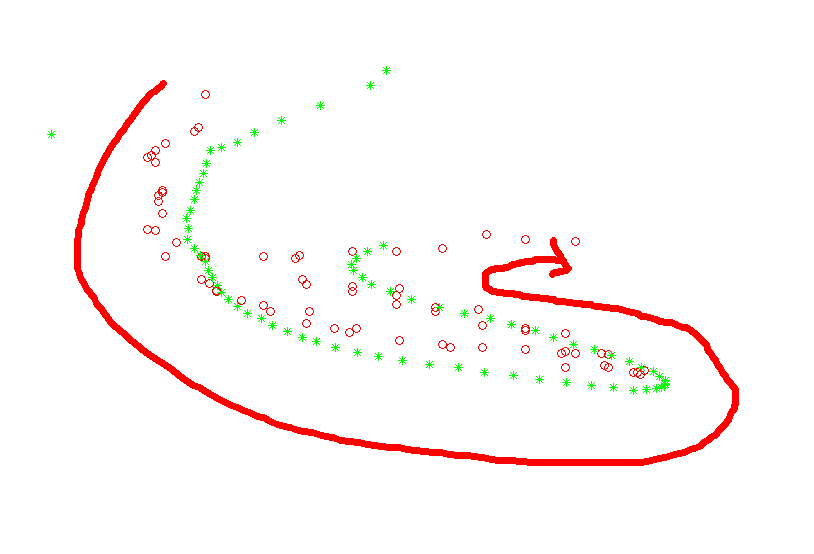
红色的圈是给定的值。绿色的点是预测。可以看出滞后。
当然可以通过修改状态转移矩阵来修改。
[1 , 0 , 1 , 0.5 ;
0 , 1 , 0.5 , 1;
 本文介绍了使用OpenCV的Kalman滤波器进行轨迹预测,通过修改状态转移矩阵以适应曲线轨迹,但发现对于复杂轨迹仍有滞后现象。作者探讨了EKF的准确性,并分享了多个关于Kalman滤波的参考资料,包括C++代码实现和Matlab工具箱。此外,还提到了将C++光流代码转换为纯C语言的需求。
本文介绍了使用OpenCV的Kalman滤波器进行轨迹预测,通过修改状态转移矩阵以适应曲线轨迹,但发现对于复杂轨迹仍有滞后现象。作者探讨了EKF的准确性,并分享了多个关于Kalman滤波的参考资料,包括C++代码实现和Matlab工具箱。此外,还提到了将C++光流代码转换为纯C语言的需求。
前两天用网上某个opencv带的kalman滤波追踪鼠标点的程序改编了一下,给定一组轨迹上的点,预测下一时刻点的位置。用的转移矩阵是
[1 0 1 0 ;
0 1 0 1;
0 0 1 0;
0 0 0 1]
(匀速直线运动)在轨迹的是有好多个弯的曲线的时候,会有滞后。
红色的圈是给定的值。绿色的点是预测。可以看出滞后。
当然可以通过修改状态转移矩阵来修改。
[1 , 0 , 1 , 0.5 ;
0 , 1 , 0.5 , 1;

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言




 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章





















