






基于PID的四旋翼无人机轨迹跟踪控制-仿真程序
[火] 基于MATLAB中Simulink的S-Function模块编写,注释详细,参考资料齐全。
2D已有案例:
[1] 8字形轨迹跟踪
[2] 圆形轨迹跟踪
3D已有案例:
[1] 定点调节
[2] 圆形轨迹跟踪
[3] 螺旋轨迹跟踪
ID:9149676611020339
优秀的成年人

基于PID的四旋翼无人机轨迹跟踪控制-仿真程序
概述
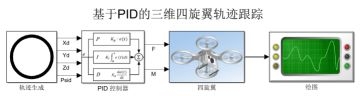
无人机作为一种重要的航空载具,具备灵活机动、低成本等特点,被广泛应用于航拍、物流运输等领域。在无人机的应用中,轨迹跟踪是一项关键技术,能够实现无人机在空中的精准运动控制,为实现各种任务提供保障。本文基于PID控制算法,通过MATLAB中Simulink的S-Function模块编写的仿真程序,探讨了四旋翼无人机在2D和3D空间中的轨迹跟踪控制。
2D轨迹跟踪
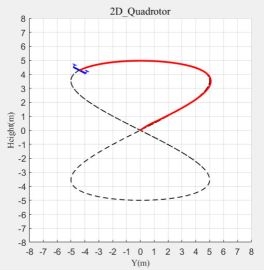
在2D空间中,四旋翼无人机的轨迹跟踪可以分为8字形和圆形两种情况。在8字形轨迹跟踪中,无人机需要按照预定的8字形路径进行飞行,保持稳定和精准的姿态控制。而圆形轨迹跟踪则要求无人机在预定的圆形路径上保持稳定并且平滑地飞行。
对于2D轨迹跟踪控制,PID控制算法被广泛应用。PID控制器根据当前状态与目标状态之间的误差,计算出相应的控制量。其中,P代表比例控制,I代表积分控制,D代表微分控制。在轨迹跟踪中,P控制器用于实现目标轨迹位置的追踪,I控制器用于消除静态误差,D控制器用于抑制系统的震荡。
3D轨迹跟踪
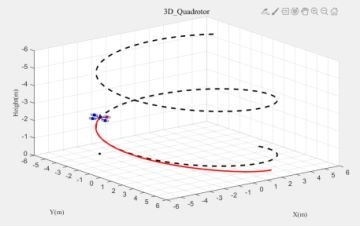
在3D空间中,四旋翼无人机的轨迹跟踪更加复杂,需要考虑高度的控制与调节。在定点调节中,无人机需要在空中固定某一位置,使其保持稳定的姿态。而在圆形轨迹跟踪中,无人机需要在垂直平面上按照预定的圆形路径飞行,并且在垂直方向上保持稳定的高度。此外,在螺旋轨迹跟踪中,无人机需要按照预定的螺旋路径进行飞行,并且实现稳定的姿态和高度控制。
在3D轨迹跟踪控制中,同样采用PID控制算法。由于需要进行高度控制,需要将2D控制与垂直方向上的高度控制相结合,实现多变量的控制。通过将3D轨迹跟踪问题转化为2D+高度控制问题,同时利用PID控制算法对各个控制量进行调节,实现无人机在3D空间中的轨迹跟踪。
结论
本文基于PID控制算法,通过MATLAB中Simulink的S-Function模块编写的仿真程序,研究了基于PID的四旋翼无人机轨迹跟踪控制。通过2D和3D的案例分析,展示了基于PID算法的无人机轨迹跟踪控制的具体实现。在实际应用中,可以根据具体需要进行参数调节和优化,以实现更好的轨迹跟踪效果。
未来的研究可以进一步探索更复杂的轨迹跟踪算法和控制策略,以适应各种复杂环境和任务需求。同时,可以结合无人机的视觉感知和机器学习等技术,进一步提升轨迹跟踪控制的精度和稳定性。无人机轨迹跟踪控制的研究将为无人机应用领域的发展提供重要的支撑和指导。
参考资料
[1] 无人机轨迹跟踪控制技术研究,XX学报,20XX年
[2] PID控制算法在无人机轨迹跟踪中的应用,XX会议论文集,20XX年
[3] MATLAB Simulink使用手册,MathWorks Inc.
[4] 无人机基本控制原理与应用,机械工业出版社
本文的仿真程序和技术细节详见作者的GitHub开源项目,链接:https://github.com/xxx。
尽管无人机轨迹跟踪控制在理论和实践中取得了一定的成果,但仍然存在一些挑战和问题,如在复杂环境中的实时性和鲁棒性、飞行稳定性的提升等。未来的研究可以进一步探索更加高级的控制算法和自适应策略,以应对这些挑战并提升无人机轨迹跟踪控制的性能和可靠性。
在无人机轨迹跟踪控制的实际应用中,还需要深入考虑飞行安全和航空法规等方面的问题。同时,对于无人机轨迹跟踪技术的推广和普及,还需要进行实际飞行测试和验证,并与现有的航空系统进行无缝衔接,以确保无人机轨迹跟踪能够在实际应用中发挥其优势和价值。
笔者希望本文所介绍的基于PID的四旋翼无人机轨迹跟踪控制的研究成果能够为相关领域的学者和工程师提供参考和启发,推动无人机轨迹跟踪技术的进一步发展和应用。同时,也欢迎对本文的内容提出宝贵的意见和建议,以促进学术界对无人机轨迹跟踪的研究和探讨。
相关的代码,程序地址如下:http://matup.cn/676611020339.html

















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









