<think>好的,我需要分析用户提供的函数`void DetectRoadLine(Mat src, Mat& ROI)`的功能。首先,我会通读代码,理解各个步骤的作用。
首先,函数接受两个参数:`src`和`ROI`,都是OpenCV的Mat类型。从命名来看,`src`可能是原始图像,`ROI`是感兴趣区域(Region of Interest)。函数的目标是检测车道线并在`src`上绘制出来。
接下来,函数将`ROI`转换为灰度图像`gray`,然后进行二值化处理,阈值设为180,高于这个值的像素设为255(白色),低于的设为0(黑色)。这一步可能是为了突出车道线,假设车道线在较亮区域。
然后,函数定义了两个点集`left_line`和`right_line`,分别用于存储左右车道线的点。接下来的循环遍历图像的左半部分(列数从0到中间)和右半部分(列数从中间到末尾),行数从中间到底部。在循环中,如果某个像素的值为255(即车道线),就将该点的坐标添加到对应的点集中。
这里可能存在一个问题:循环的顺序是否正确?例如,左车道线的遍历是从左半部分列,从中间行到底部行,而右车道线则是右半部分列同样范围的行。这样的设计是否合理?车道线通常是从近处延伸至远处,可能应该从图像底部开始检测,这里从中间行开始可能只检测图像下半部分的车道线,可能是为了排除远处的干扰。
接着,当左右车道线都有点时,函数提取四个关键点:`B_L`(左车道线底部)、`T_L`(左车道线顶部)、`T_R`(右车道线顶部)、`B_R`(右车道线底部)。这里可能存在命名混淆,因为按代码中的索引,`left_line[0]`是左半部分列、中间行的第一个点,可能对应图像中左车道线的底部,而`left_line`的最后一个点可能是左车道线的顶部?同样,`right_line[0]`是右半部分列、中间行的第一个点,可能对应右车道线的顶部,而`right_line`的最后一个点可能是右车道线的底部。这可能需要确认点的坐标顺序是否正确。
然后,函数在`src`图像上绘制四个不同颜色的圆点,并用绿色线条连接左右车道线的底部和顶部。最后,使用`fillPoly`填充这四个点形成的区域,颜色为浅蓝色(Scalar(133, 230, 238))。这里可能是在标记车道区域,例如自动驾驶中的可行区域。
但存在几个疑问:首先,左右车道线的点收集是否正确?例如,左车道线的循环是从左半部分的列,但车道线可能在右半部分也可能存在,或者反之。其次,提取的四个点是否准确代表车道的边界?此外,使用中间行作为起点是否会导致检测不完整?
可能的改进点:使用更精确的车道线检测算法,如霍夫变换、滑动窗口法或深度学习模型。此外,循环遍历所有像素可能效率较低,可以考虑优化,比如只在特定区域搜索,或者使用边缘检测后再进行筛选。
总结,该函数的功能是检测图像中的车道线,并在原始图像上绘制车道线和填充车道区域,可能用于辅助驾驶或车道偏离预警系统。但现有方法较为简单,可能受光照、车道线模糊等因素影响较大。</think>以下是对 `DetectRoadLine` 函数的逐层解析:
---
### **功能概述**
这是一个基于阈值分割的 **车道线检测与标注函数**,核心功能为:
1. 在 `ROI`(感兴趣区域)中检测左右车道线
2. 在原始图像 `src` 上绘制车道线轮廓并填充车道区域
---
### **代码执行流程**
#### **1. 预处理阶段**
```cpp
Mat gray;
cvtColor(ROI, gray, COLOR_BGR2GRAY); // 转换为灰度图
Mat thresh;
threshold(gray, thresh, 180, 255, THRESH_BINARY); // 二值化(阈值180)
```
- **目的**:通过高阈值(180)提取明亮区域(车道线通常为白色/黄色)
- **效果**:车道线变为白色(255),背景为黑色(0)
---
#### **2. 车道线点集采集**
```cpp
vector<Point> left_line, right_line;
// 左车道线检测范围:左半图像,行从中间到底部
for (int i = 0; i < thresh.cols / 2; i++) { // 列循环(左半)
for (int j = thresh.rows / 2; j < thresh.rows; j++) { // 行循环(下半)
if (thresh.at<uchar>(j, i) == 255) {
left_line.push_back(Point(i, j));
}
}
}
// 右车道线检测范围:右半图像,行从中间到底部
for (int i = thresh.cols / 2; i < thresh.cols; i++) { // 列循环(右半)
for (int j = thresh.rows / 2; j < thresh.rows; j++) { // 行循环(下半)
if (thresh.at<uchar>(j, i) == 255) {
right_line.push_back(Point(i, j));
}
}
}
```
- **逻辑**:
- 仅检测图像 **下半部分**(`j` 从 `rows/2` 开始),因车道线在近处更清晰
- 左右车道线分别在图像左右半区搜索
- **潜在问题**:
- 若车道线跨越左右半区(如弯道),检测会失败
- 未过滤噪声点(如反光、路面标记)
---
#### **3. 车道线标注与填充**
```cpp
if (left_line.size() > 0 && right_line.size() > 0) {
// 提取关键点
Point B_L = left_line[0]; // 左车道线最下方点(j最大)
Point T_L = left_line.back(); // 左车道线最上方点(j最小)
Point T_R = right_line[0]; // 右车道线最上方点(j最小)
Point B_R = right_line.back(); // 右车道线最下方点(j最大)
// 绘制彩色圆心(可视化关键点)
circle(src, B_L, 10, Scalar(0,0,255), -1); // 红色:左底部
circle(src, T_L, 10, Scalar(0,255,0), -1); // 绿色:左顶部
circle(src, T_R, 10, Scalar(255,0,0), -1); // 蓝色:右顶部
circle(src, B_R, 10, Scalar(0,255,255), -1); // 黄色:右底部
// 绘制车道线边界
line(src, B_L, T_L, Scalar(0,255,0), 10); // 左车道线(绿色)
line(src, T_R, B_R, Scalar(0,255,0), 10); // 右车道线(绿色)
// 填充车道区域
vector<Point> pts = {B_L, T_L, T_R, B_R};
vector<vector<Point>> ppts = {pts};
fillPoly(src, ppts, Scalar(133,230,238)); // 浅蓝色填充
}
```
- **标注逻辑**:
- 假设 `left_line` 和 `right_line` 的点按行坐标升序排列
- 通过首尾点确定车道线的顶部和底部边界
- **效果**:在原始图像上形成梯形填充区域(模拟车道区域)
---
### **关键限制与问题**
1. **检测假设过强**
- 仅适用于 **直道** 且车道线严格分布在左右半区
- 弯道或倾斜车道线会导致检测失败
2. **点集排序依赖**
- 代码假设 `left_line` 和 `right_line` 的点按行坐标排序(`j` 值从小到大)
- 若点集未排序,`T_L`/`B_L` 等关键点提取将错误
3. **噪声敏感**
- 二值化后的孤立白点(非车道线)会被错误收录
- 未使用滤波或形态学操作去噪
4. **效率问题**
- 遍历所有像素点效率低,实际工程中需优化(如滑动窗口法)
---
### **改进建议**
1. **增强鲁棒性**
- 改用 **霍夫变换** 或 **滑动窗口+多项式拟合** 检测车道线
- 示例代码:
```cpp
// 使用霍夫变换检测直线
vector<Vec4i> lines;
HoughLinesP(thresh, lines, 1, CV_PI/180, 50, 50, 10);
```
2. **引入曲线拟合**
- 对点集进行二次曲线拟合,适应弯道场景
- 示例代码:
```cpp
Mat coeff_left = polyfit(left_line, 2); // 二次多项式拟合
```
3. **动态阈值处理**
- 使用自适应阈值(如 `adaptiveThreshold`)替代固定阈值
4. **区域掩膜优化**
- 结合透视变换,将 ROI 限制在车辆正前方梯形区域
---
### **典型应用场景**
1. **车道保持辅助系统(LKAS)**
- 实时标注车道线,提醒驾驶员偏离车道
2. **自动驾驶感知模块**
- 提供车道区域信息,用于路径规划
3. **行车记录仪分析**
- 标注视频中的车道线,辅助事故分析
---
### **总结**
- **核心功能**:通过二值化提取车道线点集,绘制边界并填充车道区域
- **适用场景**:简单直道环境下的车道线可视化
- **改进方向**:增强弯道适应性、抗噪声能力、检测效率








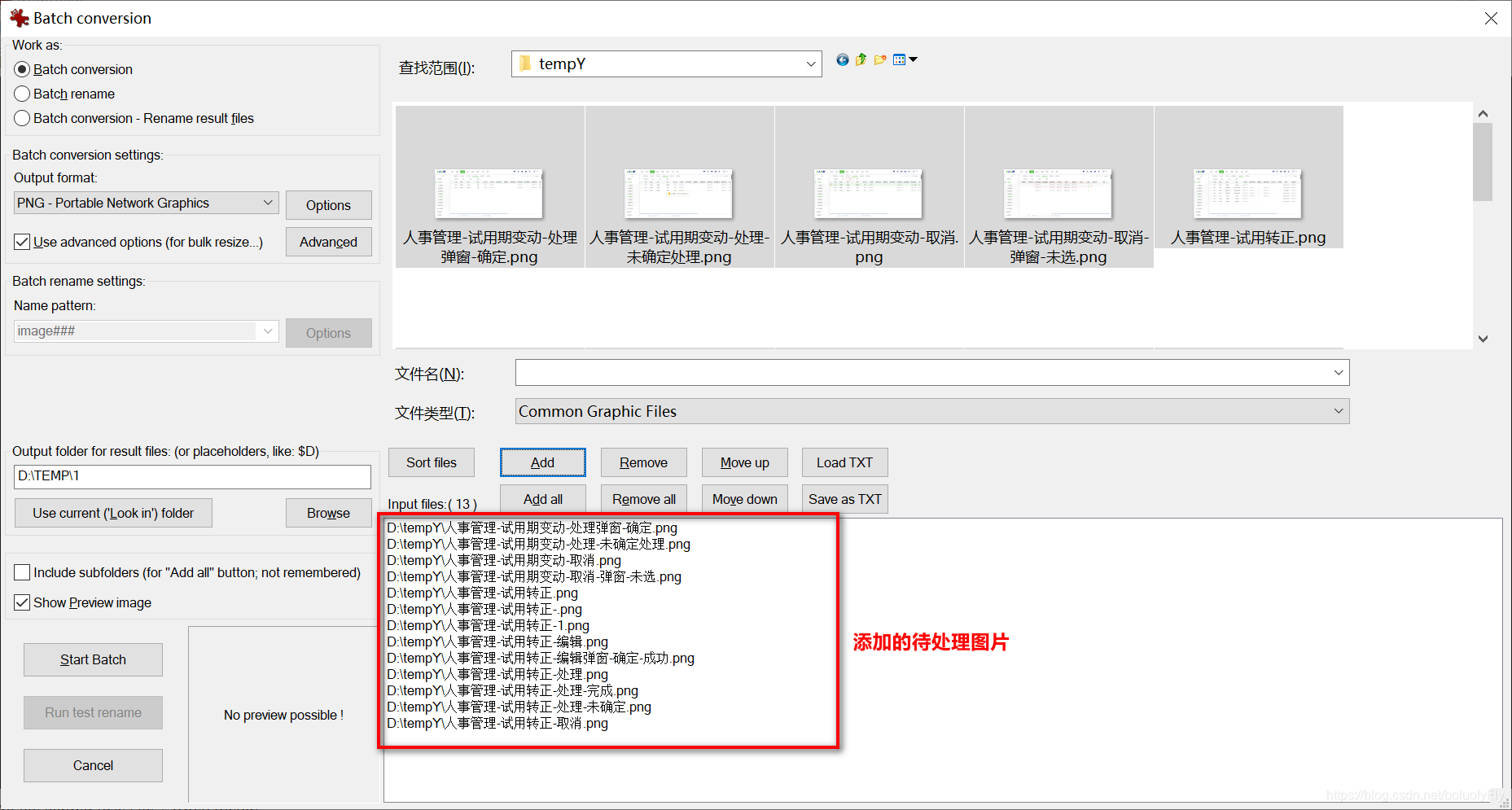
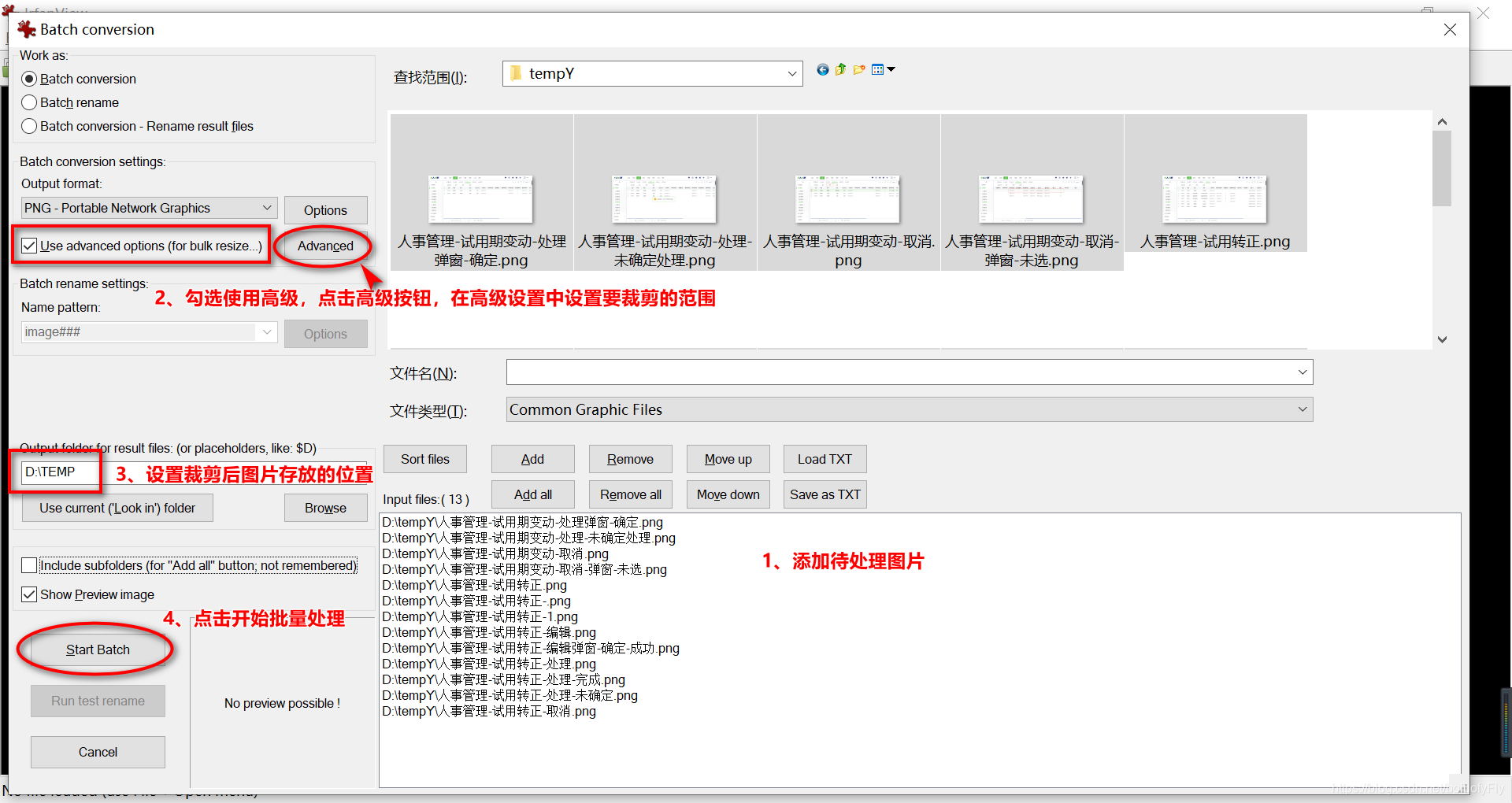
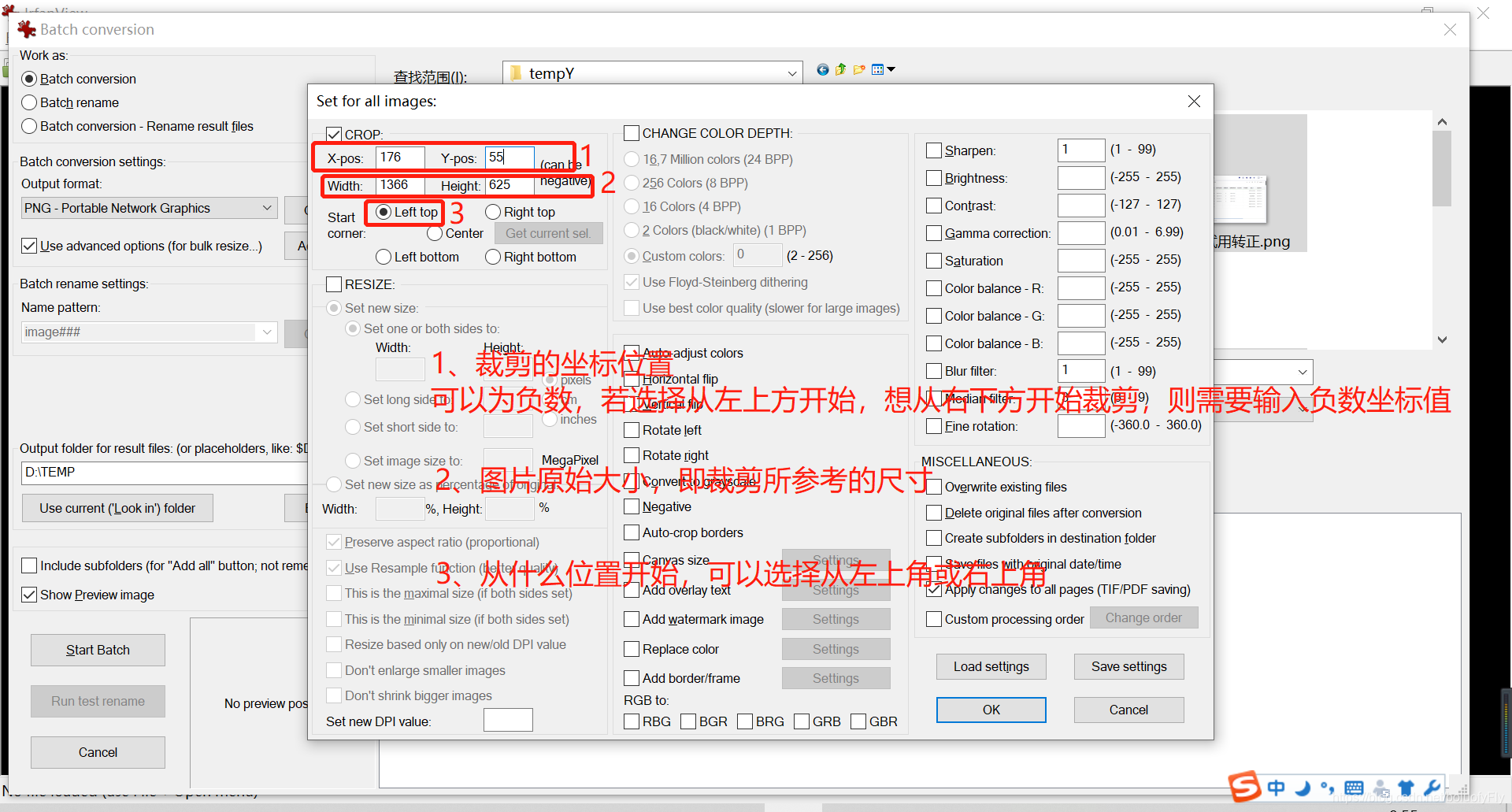
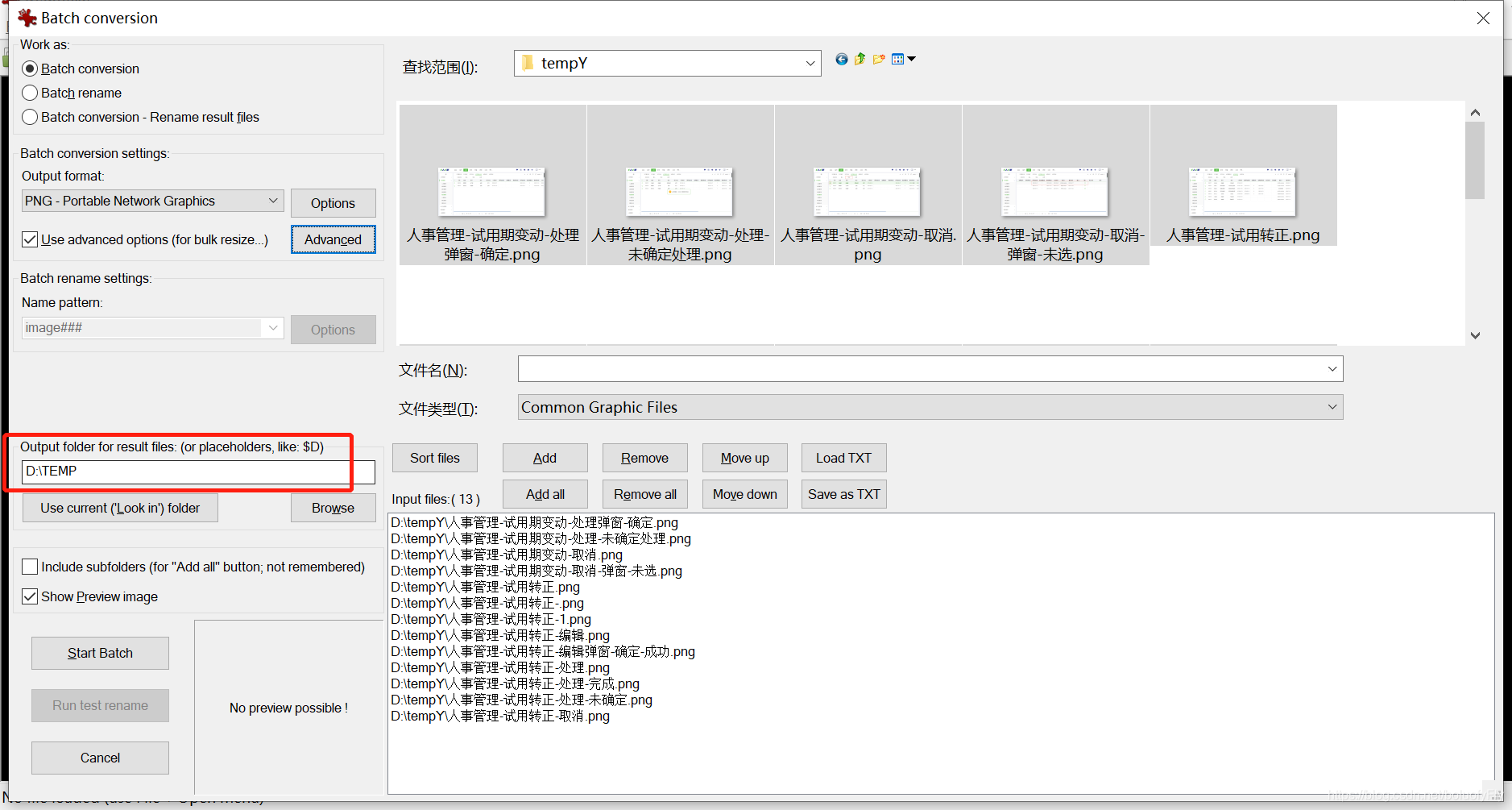
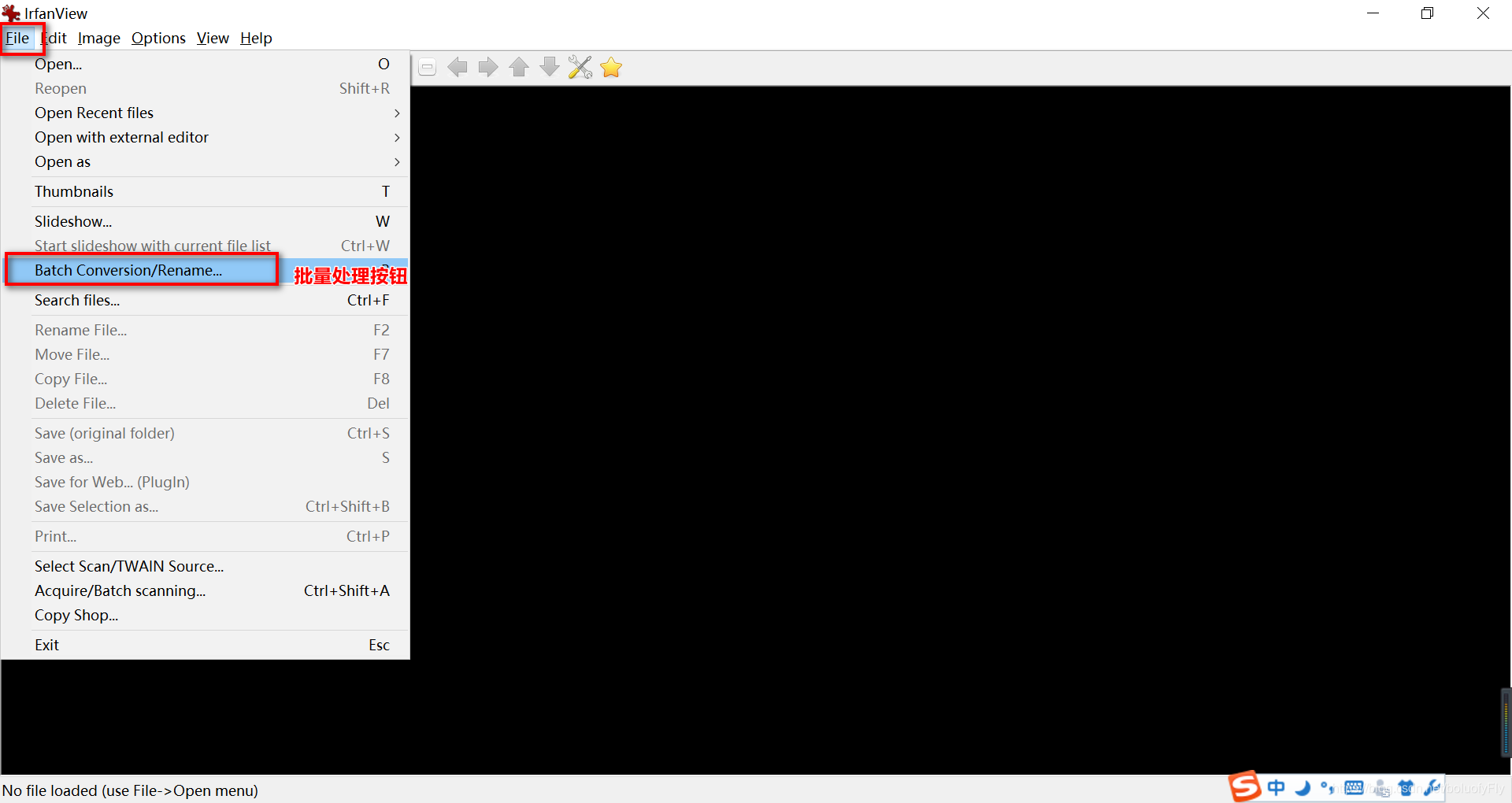 2、选择需要处理的文件:
2、选择需要处理的文件: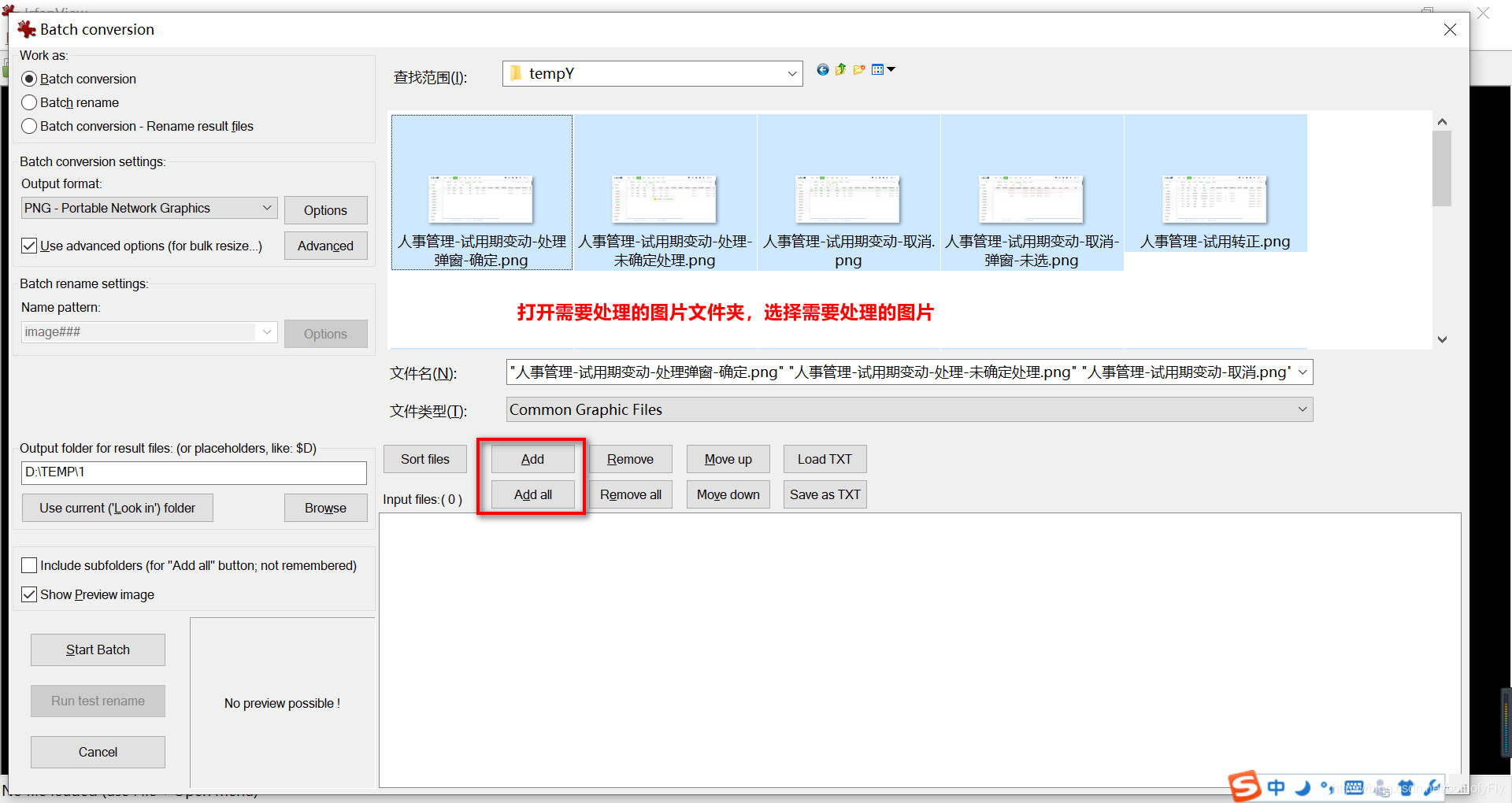

















 5106
5106

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









