







花了几天的时间钻研算法导论里的动态规划,做个总结。首先,算法导论真是经典,可惜水平有限,于是乎忽略了一些推理与数学理论,留着有机会再深入,其次可能自己的理解不是很到位,有错误的地方欢迎提出,谢谢
。
动态规划(dynamic programming)与分治算法相似,都是通过组合子问题的解来求解原问题(在这里,“programming”指的是一种表格法,并非编写计算机程序)。
一、与分治算法区别:
1.子问题是否重叠性
①分治算法将问题划分为互不相交的子问题,递归地求解子问题,再将它们的解组合起来,求出原问题的解。
②动态规划应用于子问题重叠的情况,即不同子问题具有公共的子子问题(子问题的求解释递归进行的,将其划分为更小的子子问题)
2.子问题是否重复求解
①分治算法会反复求解那些公共子问题。
②动态规划对每个子子问题只求解一次,将其解保存在一个表格中。(空间换时间)
二、动态规划的求解步骤
1.刻画一个最优解的结构特征。
2.递归地定义最优解的值。
3.计算最优解的值,通常采用自底向上的方法。
4.利用计算出的信息构造一个最优解。
步骤1~3是动态规划算法求解问题的基础,如果我们仅仅需要一个最优解的值,而非解本身,可以忽略步骤4。如果确实要做步骤4,有时就需要在执行步骤3的过程中维护一些额外信息,以便用来构造一个最优解。
三、钢条切割
第一个应用动态规划的例子是求解一个如何切割钢条的简单问题。
Serling公司购买长钢条,将其切割为短钢条出售,切割工序本身没有成本支出。公司管理层希望知道最佳的切割方案。假定我们知道Serling公司出售一段长度为i英寸的钢条的价格为pi(i=1,2,..,单位为美元)。钢条的长度均为整英寸,下图给出一个价格表的样例。

钢条切割问题时这样的:给定一段长度为n英寸的钢条和一个价格表pi(i=1,2,...,n),求切割钢条方案,使得销量收益rn最大,注意,如果长度为n英寸的钢条的价格pn足够大,最优解可能就是完全不需要切割。
考虑n=4的情况,可以知道切割为p2+p2=5+5=10的收益(其中长度为n英寸的钢条共有2^(n-1)种不同的切割方案,当然我们可以按照长度非递减的顺序切割小段钢条,切割方案会少得多),为最优解。
对于上述价格表样例,我们可以观察所有最优收益值ri(i=1,2,..,10)及对应的最优切割方案:
r1=1,切割方案1=1(无切割)
r2=5,切割方案2=2(无切割)
r3=8,切割方案3=3(无切割)
r4=10,切割方案4=2+2
r5=13,切割方案5=2+3
r6=17,切割方案6=6(无切割)
r7=18,切割方案7=1+6或7=2+2+3=4+3
r8=22,切割方案8=2+6
r9=25,切割方案9=3+6
r10=30,切割方案10=10(无切割)
更一般地,对于rn(n>=1),我们可以用更短的钢条的最优切割收益来描述它:
rn=max(pn,r(1)+r(n-1),r(2)+r(n-2),...,r(n-1)+r(1)) (这里可以优化一下,例如7=1+6和7=6+1其实是一样的,故到r(n/2)+r(n-n/2)时即可)
其中第一个参数pn对应不切割,直接出售长度为n英寸的钢条方案。其他n-1个参数对应另外n-1种方案;对应每个i=1,2,...,n-1,首先将钢条切割为长度为i和n-i的两段,接着求解这两段的最优切割收益ri和r(n-i)(每种方案的最优收益为两段的最优收益之和)。
由于无法预知哪种方案会获得最优收益,我们必须考察所有可能的i,选取其中收益最大者。
注意到,为了求解规模为n的原问题,我们先求解形式完全一样,但规模更小的子问题。即当完成首次切割后,我们将两段钢条看成两个独立的钢条切割问题实例。我们通过组合两个相关子问题的最优解,并在所有可能的两段切割方案中选取组合收益最大者,构成原问题的最优解。我们称钢条切割问题满足最优子结构(optimal substructure)性质:问题的最优解由相关子问题的最优解组合而成,而这些子问题可以独立求解。
递归方法求解最优钢条切割问题
除了上述求解,钢条切割问题还存在一种相似的但更为简单的递归求解:我们将钢条从左边切割下长度为i的一段,只对右边剩下的长度为n-i的一段继续进行切割(递归求解),对左边的一段不再进行切割。
即问题分解的方式为:将长度为n的钢条分解为左边开始一段,以及剩下部分继续分解的结果。这样不做任何切割方案就可以描述为:第一段的长度为n,收益为pn,剩余部分长度为0,对应的收益为r0=0。于是我们可以得到上述公式的简化版本:
rn=max(pi+r(n-i)) (1<=i<=n)
在此公式中,原问题的最优解只包含一个相关子问题(右端剩余部分)的解,而不是两个。
自顶向下递归实现
但是用递归实现,一旦输入规模稍微变大,程序运行时间会变得相当长,例如,对n=40,程序至少运行好几分钟(下面会给出性能对比),很可能超过一个小时。实际上,你会发现,每当将n增大1,程序运行时间差不多就会增加1倍。
至于效率为什么那么差,原因在于CUT_ROD反复地用相同的参数值对自身进行递归调用,即它反复求解相同的子问题,下图显示了n=4时的调用过程:CUT_ROD(p,n)
对于i=1,2,...n调用CUT_ROD(p,n-i),等价于对j=01,...,n-1调用CUT_ROD(p,j)。当这个过程递归展开时,它所做的工作量(用n的函数的形式描述)会爆炸性的增长。

这棵递归调用树显示了n=4时,CUT_ROD(p,n)的递归调用过程。每个结点的标号为对应子问题的规模n,因此,从父结点s到子节点t的边表示从钢条左端切下长度为s-t的一段,然后继续
递归求解剩余的规模为t的子问题。从根结点到叶结点的一条路径对应长度为n的钢条的2^(n-1)种切割方案之一。一般来说这棵递归树共有2^n个结点,其中有2^(n-1)个叶子结点。
分析运行时间,T(n)=2^n,CUT_ROD为运行时间为n的指数函数
使用动态规划方法求解最优钢条切割问题
现在展示如何将CUT_ROD转换为一个更高效的动态规划算法。
动态规划方法的思想如下所述。我们已经看到,朴素递归算法之所以效率很低,是因为它反复求解相同的子问题。因此,动态规划方法仔细安排求解顺序,对每个子问题只求解一次,并将结果保存下来。
如果随后再次需要此子问题的解,只需查找保存的结果,而不必计算。因此,动态规划方法是付出额外空间来节省计算时间,是典型的时空权衡(time-memorytrade-off)的例子。而时间上的节省可能使非常巨大的:可能将一个指数时间的解转换为一个多项式时间的解。如果子问题的数量是输入规模的多项式函数,而我们可以在多项式时间内求出每个子问题,那么动态规划方法的总运行时间就是多项式阶的。
动态规划有两种等价的实现方法,下面以钢条切割为例展示这两种方法。
第一种方法称为带备忘的自顶向下法(top-down with memoization)。此方法仍按自然的递归形式编写过程,但过程会保存每个子问题的解(通常保存在一个数组或散列表中)。当需要一个子问题的解时,过程首先检查是否已经保存过此解。如果是直接返回保存的值,从而节省了计算时间;否则,按通常方式计算这个子问题。我们称这个递归过程是带备忘的(memoized),因为它“记住”了之前已经计算出的结果。
第二种方法称为自底向上法(bottom-up method)。这种方法一般需要恰当定义子问题“规模”的概念,使得任何子问题的求解只依赖于“更小的”子问题的求解。当求解某个子问题时,它所依赖的那些更小的子问题都已求解完毕,结果已经保存。每个子问题只需求解一次,当我们求解它(也是第一次遇见它)时,它的所有前提子问题都已求解完成。
两种方法得到的算法具有相同的渐近运行时间,仅有的差异是在某些特殊情况下,自顶向下方法并未真正递归地考察所有可能的子问题。由于没有频繁的递归函数调用开销,自底向上方法的时间复杂性函数通常具有更小的系数。
重构解
前面给出的钢条切割问题的动态规划算法返回最优解的收益值,但并未返回解本身(一个长度列表,给出切割后每段钢条的长度)。我们可以扩展动态规划算法,使之对每个子问题不仅保存最优收益值,还保存对应的切割方案。利用这些信息,我们就能输出最优解。

动态规划(dynamic programming)与分治算法相似,都是通过组合子问题的解来求解原问题(在这里,“programming”指的是一种表格法,并非编写计算机程序)。
一、与分治算法区别:
1.子问题是否重叠性
①分治算法将问题划分为互不相交的子问题,递归地求解子问题,再将它们的解组合起来,求出原问题的解。
②动态规划应用于子问题重叠的情况,即不同子问题具有公共的子子问题(子问题的求解释递归进行的,将其划分为更小的子子问题)
2.子问题是否重复求解
①分治算法会反复求解那些公共子问题。
②动态规划对每个子子问题只求解一次,将其解保存在一个表格中。(空间换时间)
二、动态规划的求解步骤
1.刻画一个最优解的结构特征。
2.递归地定义最优解的值。
3.计算最优解的值,通常采用自底向上的方法。
4.利用计算出的信息构造一个最优解。
步骤1~3是动态规划算法求解问题的基础,如果我们仅仅需要一个最优解的值,而非解本身,可以忽略步骤4。如果确实要做步骤4,有时就需要在执行步骤3的过程中维护一些额外信息,以便用来构造一个最优解。
三、钢条切割
第一个应用动态规划的例子是求解一个如何切割钢条的简单问题。
Serling公司购买长钢条,将其切割为短钢条出售,切割工序本身没有成本支出。公司管理层希望知道最佳的切割方案。假定我们知道Serling公司出售一段长度为i英寸的钢条的价格为pi(i=1,2,..,单位为美元)。钢条的长度均为整英寸,下图给出一个价格表的样例。
钢条切割问题时这样的:给定一段长度为n英寸的钢条和一个价格表pi(i=1,2,...,n),求切割钢条方案,使得销量收益rn最大,注意,如果长度为n英寸的钢条的价格pn足够大,最优解可能就是完全不需要切割。
考虑n=4的情况,可以知道切割为p2+p2=5+5=10的收益(其中长度为n英寸的钢条共有2^(n-1)种不同的切割方案,当然我们可以按照长度非递减的顺序切割小段钢条,切割方案会少得多),为最优解。
对于上述价格表样例,我们可以观察所有最优收益值ri(i=1,2,..,10)及对应的最优切割方案:
r1=1,切割方案1=1(无切割)
r2=5,切割方案2=2(无切割)
r3=8,切割方案3=3(无切割)
r4=10,切割方案4=2+2
r5=13,切割方案5=2+3
r6=17,切割方案6=6(无切割)
r7=18,切割方案7=1+6或7=2+2+3=4+3
r8=22,切割方案8=2+6
r9=25,切割方案9=3+6
r10=30,切割方案10=10(无切割)
更一般地,对于rn(n>=1),我们可以用更短的钢条的最优切割收益来描述它:
rn=max(pn,r(1)+r(n-1),r(2)+r(n-2),...,r(n-1)+r(1)) (这里可以优化一下,例如7=1+6和7=6+1其实是一样的,故到r(n/2)+r(n-n/2)时即可)
其中第一个参数pn对应不切割,直接出售长度为n英寸的钢条方案。其他n-1个参数对应另外n-1种方案;对应每个i=1,2,...,n-1,首先将钢条切割为长度为i和n-i的两段,接着求解这两段的最优切割收益ri和r(n-i)(每种方案的最优收益为两段的最优收益之和)。
由于无法预知哪种方案会获得最优收益,我们必须考察所有可能的i,选取其中收益最大者。
注意到,为了求解规模为n的原问题,我们先求解形式完全一样,但规模更小的子问题。即当完成首次切割后,我们将两段钢条看成两个独立的钢条切割问题实例。我们通过组合两个相关子问题的最优解,并在所有可能的两段切割方案中选取组合收益最大者,构成原问题的最优解。我们称钢条切割问题满足最优子结构(optimal substructure)性质:问题的最优解由相关子问题的最优解组合而成,而这些子问题可以独立求解。
递归方法求解最优钢条切割问题
除了上述求解,钢条切割问题还存在一种相似的但更为简单的递归求解:我们将钢条从左边切割下长度为i的一段,只对右边剩下的长度为n-i的一段继续进行切割(递归求解),对左边的一段不再进行切割。
即问题分解的方式为:将长度为n的钢条分解为左边开始一段,以及剩下部分继续分解的结果。这样不做任何切割方案就可以描述为:第一段的长度为n,收益为pn,剩余部分长度为0,对应的收益为r0=0。于是我们可以得到上述公式的简化版本:
rn=max(pi+r(n-i)) (1<=i<=n)
在此公式中,原问题的最优解只包含一个相关子问题(右端剩余部分)的解,而不是两个。
自顶向下递归实现
下面的过程实现了公式的计算,它采用的是一种直接的自顶向下的递归方法。(原文是伪代码,这里是C++语言的实现)
int CUT_ROD(int *p,int n) /* 过程CUT_ROD以价格数组p[1..n]和整数n为输入,返回长度为n的钢条的最大收益 */
{
if(n==0) return 0; /* 若n=0,不可能有任何收益,返回0 */
int q=INT_MIN; /* 将最大收益q初始化为负无穷,以便for循环可以正确计算 */
for(int i=1;i<=n;i++) q=max(q,p[i]+CUT_ROD(p,n-i));
return q; /* 返回计算结果 */
}但是用递归实现,一旦输入规模稍微变大,程序运行时间会变得相当长,例如,对n=40,程序至少运行好几分钟(下面会给出性能对比),很可能超过一个小时。实际上,你会发现,每当将n增大1,程序运行时间差不多就会增加1倍。
至于效率为什么那么差,原因在于CUT_ROD反复地用相同的参数值对自身进行递归调用,即它反复求解相同的子问题,下图显示了n=4时的调用过程:CUT_ROD(p,n)
对于i=1,2,...n调用CUT_ROD(p,n-i),等价于对j=01,...,n-1调用CUT_ROD(p,j)。当这个过程递归展开时,它所做的工作量(用n的函数的形式描述)会爆炸性的增长。
这棵递归调用树显示了n=4时,CUT_ROD(p,n)的递归调用过程。每个结点的标号为对应子问题的规模n,因此,从父结点s到子节点t的边表示从钢条左端切下长度为s-t的一段,然后继续
递归求解剩余的规模为t的子问题。从根结点到叶结点的一条路径对应长度为n的钢条的2^(n-1)种切割方案之一。一般来说这棵递归树共有2^n个结点,其中有2^(n-1)个叶子结点。
分析运行时间,T(n)=2^n,CUT_ROD为运行时间为n的指数函数
使用动态规划方法求解最优钢条切割问题
现在展示如何将CUT_ROD转换为一个更高效的动态规划算法。
动态规划方法的思想如下所述。我们已经看到,朴素递归算法之所以效率很低,是因为它反复求解相同的子问题。因此,动态规划方法仔细安排求解顺序,对每个子问题只求解一次,并将结果保存下来。
如果随后再次需要此子问题的解,只需查找保存的结果,而不必计算。因此,动态规划方法是付出额外空间来节省计算时间,是典型的时空权衡(time-memorytrade-off)的例子。而时间上的节省可能使非常巨大的:可能将一个指数时间的解转换为一个多项式时间的解。如果子问题的数量是输入规模的多项式函数,而我们可以在多项式时间内求出每个子问题,那么动态规划方法的总运行时间就是多项式阶的。
动态规划有两种等价的实现方法,下面以钢条切割为例展示这两种方法。
第一种方法称为带备忘的自顶向下法(top-down with memoization)。此方法仍按自然的递归形式编写过程,但过程会保存每个子问题的解(通常保存在一个数组或散列表中)。当需要一个子问题的解时,过程首先检查是否已经保存过此解。如果是直接返回保存的值,从而节省了计算时间;否则,按通常方式计算这个子问题。我们称这个递归过程是带备忘的(memoized),因为它“记住”了之前已经计算出的结果。
第二种方法称为自底向上法(bottom-up method)。这种方法一般需要恰当定义子问题“规模”的概念,使得任何子问题的求解只依赖于“更小的”子问题的求解。当求解某个子问题时,它所依赖的那些更小的子问题都已求解完毕,结果已经保存。每个子问题只需求解一次,当我们求解它(也是第一次遇见它)时,它的所有前提子问题都已求解完成。
两种方法得到的算法具有相同的渐近运行时间,仅有的差异是在某些特殊情况下,自顶向下方法并未真正递归地考察所有可能的子问题。由于没有频繁的递归函数调用开销,自底向上方法的时间复杂性函数通常具有更小的系数。
下面给出的是自顶向下CUT-ROD过程的c++语言代码,加入了备忘机制:
int MEMOIZED_CUT_ROD(int *p,int n)
{
int *r=new int[n+1];
for(int i=0;i<=n;i++) r[i]=INT_MIN; /* 初始化为负无穷,这是一种常见的表示“未知值”的方法(已知的收益总是非负值)*/
return MEMOIZED_CUT_ROD_AUX(p,n,r);
}
int MEMOIZED_CUT_ROD_AUX(int *p,int n,int *r)
{
int q;
if(r[n]>=0) return r[n]; /* 若所需值已知,直接返回 */
if(n==0) q=0; /* 否则计算 */
else
{
q=INT_MIN;
for(int i=1;i<=n;i++) q=max(q,p[i]+ MEMOIZED_CUT_ROD_AUX(p,n-i,r));
}
r[n]=q; /* 存入r[n] */
return q;
}自底向上版本更为简单:
int BOTTOM_UP_CUT_ROD(int *p,int n)
{
int q;
int *r=new int[n+1];
r[0]=0;
for(int i=1;i<=n;i++)
{
q=INT_MIN;
for(int j=1;j<=i;j++) q=max(q,p[j]+r[i-j]); /* 内for循环的迭代次数构成一个等差数列。 */
r[i]=q;
}
return r[n];
}重构解
前面给出的钢条切割问题的动态规划算法返回最优解的收益值,但并未返回解本身(一个长度列表,给出切割后每段钢条的长度)。我们可以扩展动态规划算法,使之对每个子问题不仅保存最优收益值,还保存对应的切割方案。利用这些信息,我们就能输出最优解。
下面给出的是BOTTOM_UP_CUT_ROD的扩展版本,它对长度为i的钢条不仅计算最大收益值ri,还保存最优解对应的第一段钢条的切割长度si:
void EXTENDED_BOTTOM_UP_CUT_ROD(int *p,int n,int *r,int *s) /* 原文是返回两个数组,这里通过传入两个数组完成同样操作 */
{
int q;
r[0]=0;
for(int i=1;i<=n;i++)
{
q=INT_MIN;
for(int j=1;j<=i;j++)
{
if(q<p[i]+r[i-j])
{
q=p[i]+r[i-j];
s[i]=j;
}
}
r[i]=q;
}
}下面过程输出长度为n的钢条的完整最优切割方案:
void PRINT_CUT_ROD_SOLUTION(int *p,int n)
{
int *r=new int [n+1];
int *s=new int [n+1];
EXTENDED_BOTTOM_UP_CUT_ROD(p,n,r,s);
while(n>0)
{
cout<<s[n];
n=n-s[n];
}
}下面给出完整的代码实现,以及递归与动规解法的效率对比。
#include<iostream>
#include<ctime>
const int INT_MIN=-2147483647 - 1;
using namespace std;
/*自顶向下递归*/
int CUT_ROD(int *p,int n)
{
if(n==0) return 0;
int q=INT_MIN;
for(int i=1;i<=n;i++) q=max(q,p[i]+CUT_ROD(p,n-i));
return q;
}
/*带备忘的自顶向下法*/
int MEMOIZED_CUT_ROD_AUX(int *p,int n,int *r)
{
int q;
if(r[n]>=0) return r[n]; /* 若所需值已知,直接返回 */
if(n==0) q=0; /* 否则计算 */
else
{
q=INT_MIN;
for(int i=1;i<=n;i++) q=max(q,p[i]+ MEMOIZED_CUT_ROD_AUX(p,n-i,r));
}
r[n]=q; /* 存入r[n] */
return q;
}
int MEMOIZED_CUT_ROD(int *p,int n)
{
int *r=new int[n+1];
for(int i=0;i<=n;i++) r[i]=INT_MIN; /* 初始化为负无穷,这是一种常见的表示“未知值”的方法(已知的收益总是非负值)*/
return MEMOIZED_CUT_ROD_AUX(p,n,r);
}
/*自底向上法*/
int BOTTOM_UP_CUT_ROD(int *p,int n)
{
int q;
int *r=new int[n+1];
r[0]=0;
for(int i=1;i<=n;i++)
{
q=INT_MIN;
for(int j=1;j<=i;j++) q=max(q,p[j]+r[i-j]); /* 内for循环的迭代次数构成一个等差数列。 */
r[i]=q;
}
return r[n];
}
/*重构解*/
int EXTENDED_BOTTOM_UP_CUT_ROD(int *p,int n,int *r,int *s) /* 原文是返回两个数组,这里通过传入两个数组完成同样操作 */
{
int q;
r[0]=0;
for(int i=1;i<=n;i++)
{
q=INT_MIN;
for(int j=1;j<=i;j++)
{
if(q<p[j]+r[i-j])
{
q=p[j]+r[i-j];
s[i]=j;
}
}
r[i]=q;
}
return r[n];
}
void PRINT_CUT_ROD_SOLUTION(int *p,int n)
{
int *r=new int [n+1];
int *s=new int [n+1];
cout<<EXTENDED_BOTTOM_UP_CUT_ROD(p,n,r,s)<<" = ";
while(n>0)
{
cout<<"s["<<s[n]<<"] ";
n=n-s[n];
}
cout<<endl;
}
int main()
{
int p[41]={0,1,5,8,9,10,17,17,20,24,30,1,1,1,1,1,1,1,1,1,1,2,1,1,1,1,1,1,1,1,1,3,1,1,1,1,1,1,1,1,1};/*为了测试性能*/
time_t start,finish,totaltime;
cout<<"——————带备忘的自顶向下法——————\n";
start=clock();
cout<<"n=40时最优解为:"<<MEMOIZED_CUT_ROD(p,40)<<endl;
finish=clock();
totaltime=(double)(finish-start)/CLOCKS_PER_SEC;
cout<<"\n运行时间为"<<totaltime<<"秒!"<<endl;
cout<<"————————自底向上法————————\n";
start=clock();
cout<<"n=40时最优解为:"<<BOTTOM_UP_CUT_ROD(p,40)<<endl;
finish=clock();
totaltime=(double)(finish-start)/CLOCKS_PER_SEC;
cout<<"\n运行时间为"<<totaltime<<"秒!"<<endl;
cout<<"————————自顶向下递归———————\n";
start=clock();
cout<<"n=40时最优解为:"<<CUT_ROD(p,40)<<endl;
finish=clock();
totaltime=(double)(finish-start)/CLOCKS_PER_SEC;
cout<<"\n运行时间为"<<totaltime<<"秒!"<<endl;
cout<<"————————————————————\n";
cout<<"n=30时最优解为:"<<endl;
PRINT_CUT_ROD_SOLUTION(p,30);
cout<<"n=29时最优解为:"<<endl;
PRINT_CUT_ROD_SOLUTION(p,29);
return 0;
}
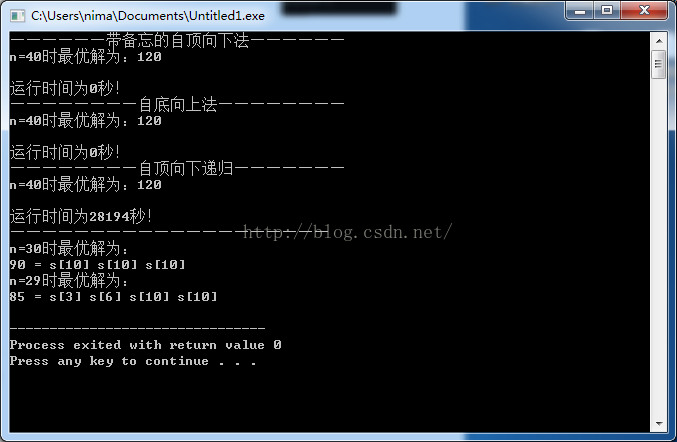
当n=40时

通过比较可以发现,动规与递归的性能,在时间上差很多,当n=40时,递归的的时间是28194秒,而动规的时间很小,当n=160时也是很小的时间。所以在时间上的节省是巨大的。















 2198
2198











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









