






西门子s7-200smart程序110个包括伺服控制,过程控制,模拟量控制,通讯控制,开关量控制,pid控制,恒压供水,暖通等
ID:334713719365959
诺信诚设计
西门子S7-200SMART是一款功能强大的编程控制器,它具备伺服控制、过程控制、模拟量控制、通讯控制、开关量控制、PID控制、恒压供水及暖通等功能,为工程师和技术人员提供了广泛的应用领域。本文将围绕这些功能展开,深入分析其技术特点和应用场景。
伺服控制是S7-200SMART的一大亮点,它通过精确的位置控制和速度控制,实现了对运动设备的精准控制。无论是机械臂的运动控制,还是自动化设备的位置调整,S7-200SMART都能提供可靠稳定的解决方案。此外,S7-200SMART还支持伺服电机的功率调节,便于工程师根据具体需求进行参数调整,提高设备的运行效率。
过程控制是S7-200SMART的另一项重要功能。通过对过程变量的实时监测和控制,工程师可以对生产过程进行精细化管理。S7-200SMART支持多种常用的控制策略,如比例控制、积分控制和微分控制,并能根据实际需求进行组合调整,提高生产效率和产品质量。
模拟量控制是S7-200SMART的强项之一。该控制器可以轻松实现对模拟量信号的采集和处理,应对各种复杂的工业环境。不论是对温度、压力、流量等参数的实时监测,还是对模拟量信号的精确控制,S7-200SMART都能胜任,并能提供高精度的数据采集和处理能力。
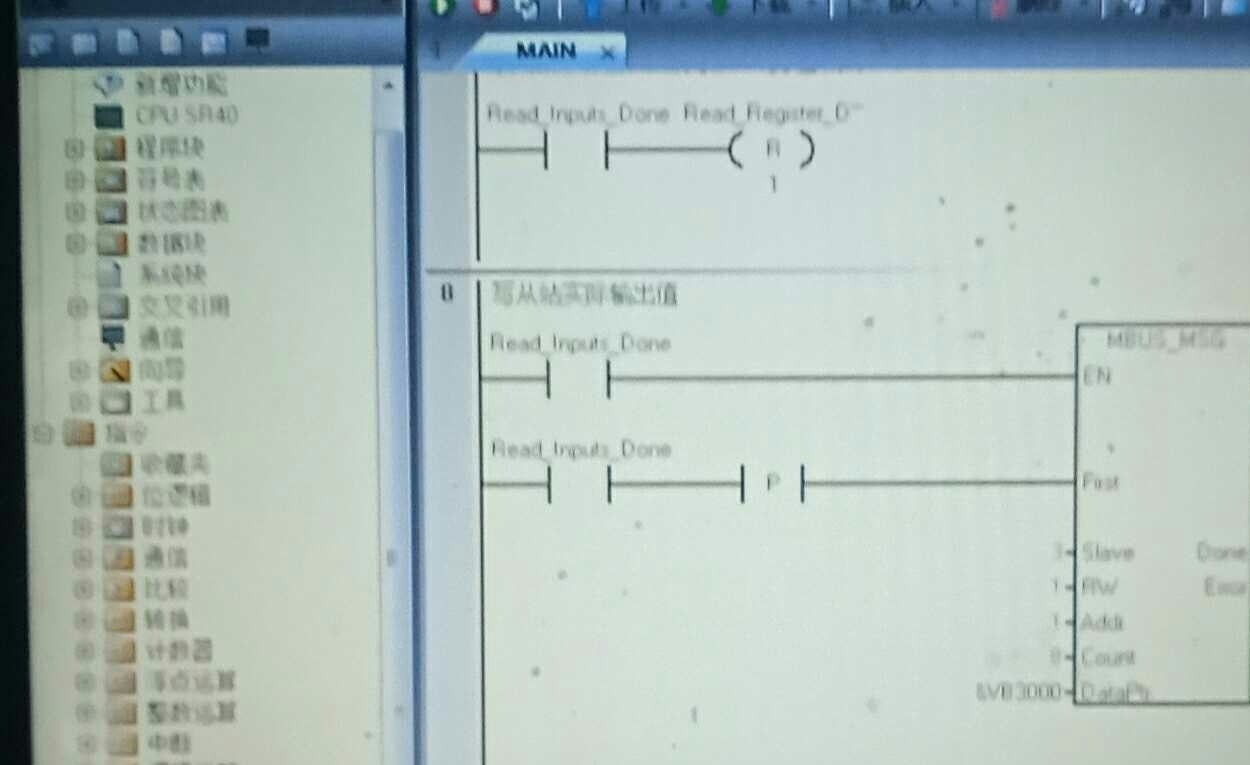
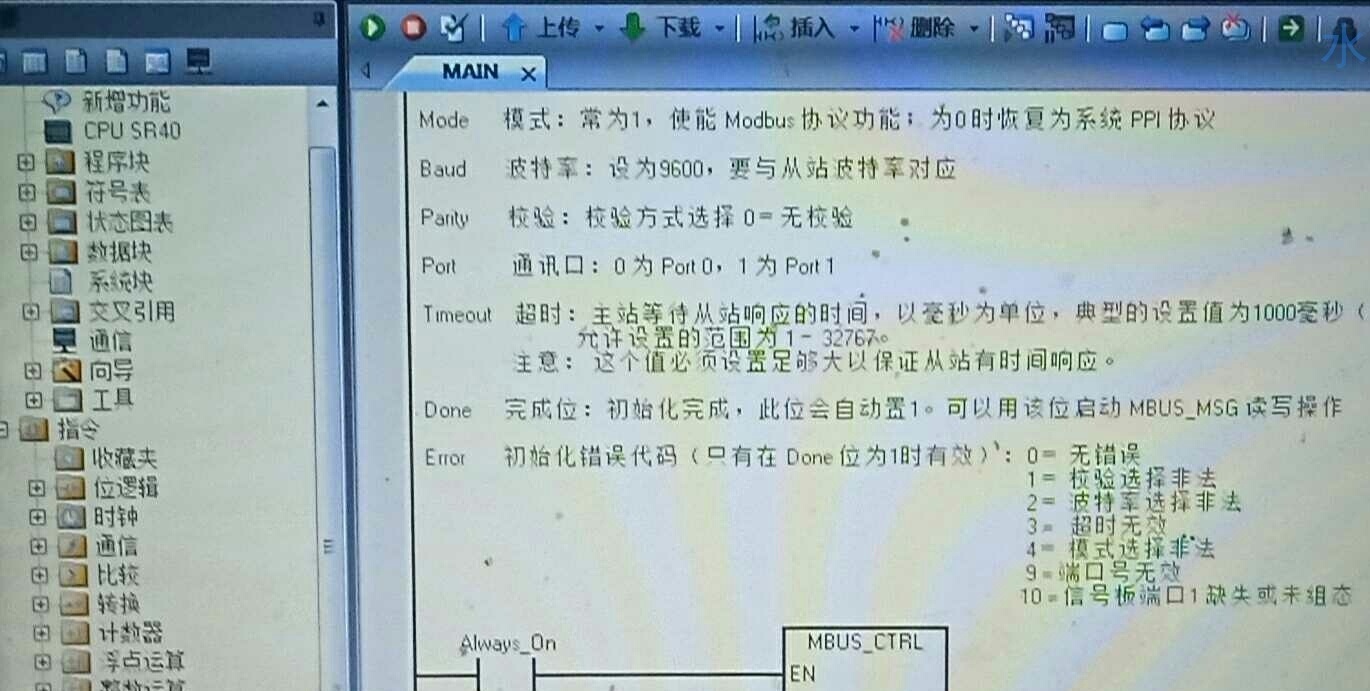
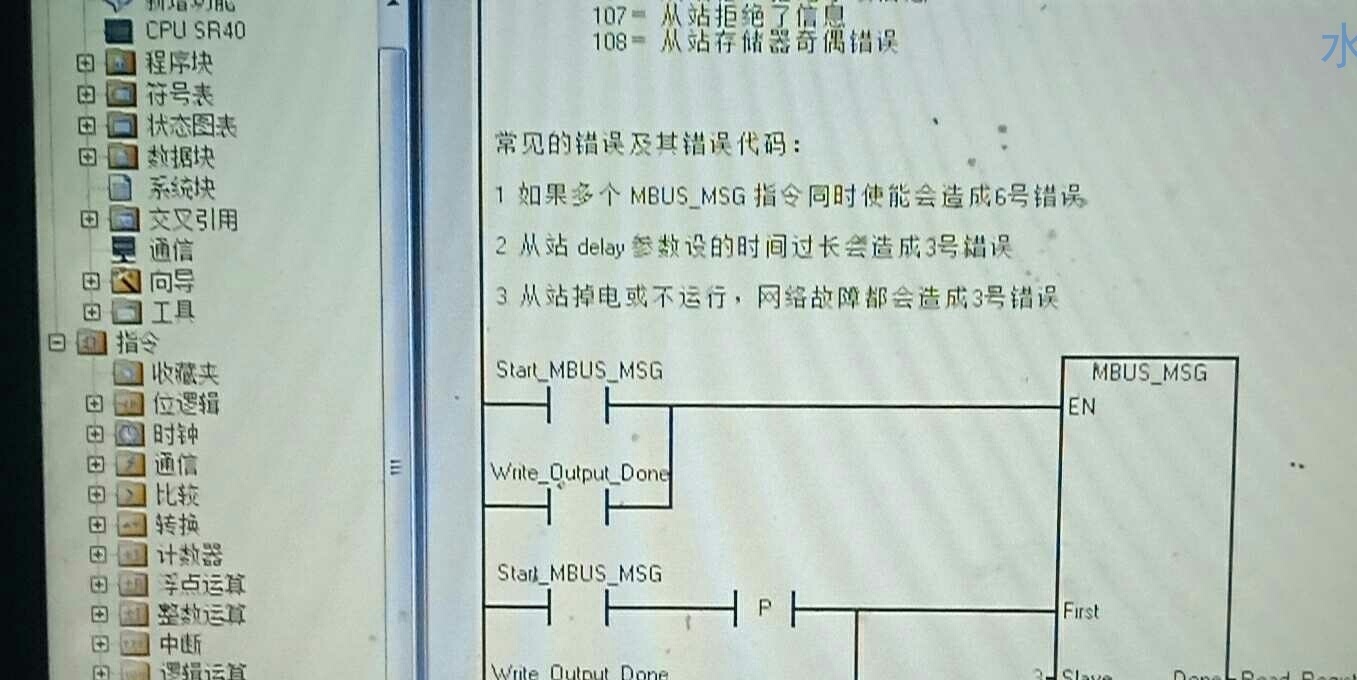
通讯控制是S7-200SMART的另一个亮点。它支持多种通信协议,如Modbus、Profibus等,可以与其他设备进行快速、稳定的数据交换。通过与上位机或其他设备的通信,S7-200SMART可以实现远程监控、数据采集和远程控制等功能,为工程师提供了更多的便利。
开关量控制是S7-200SMART的一项基础功能,它可以实现对开关量设备的控制和状态监测。无论是对开关量输入信号的检测,还是对开关量输出信号的控制,S7-200SMART都能提供可靠的解决方案。此外,它还支持多种开关量设备的接口,如继电器、开关等,便于工程师的接入和调试。
PID控制是S7-200SMART的又一亮点,它通过对过程变量的实时采集和控制,实现对物理系统的自动调节。S7-200SMART提供了灵活的PID参数配置和调整功能,工程师可以根据实际需求进行参数设置,提高系统的稳定性和响应速度。
恒压供水和暖通是S7-200SMART在建筑领域的重要应用。它通过对水泵、风机等设备的精确控制,实现建筑物的恒压供水和恒温调节,提供舒适的室内环境。S7-200SMART支持多种恒压供水和暖通控制算法,并能与传感器、执行机构等设备进行无缝连接,提供全面的自动化解决方案。
总结起来,西门子S7-200SMART是一款功能强大、灵活多变的编程控制器,它具备伺服控制、过程控制、模拟量控制、通讯控制、开关量控制、PID控制、恒压供水和暖通等多项技术特点。无论是在工业自动化领域,还是在建筑领域,S7-200SMART都能为工程师提供可靠、高效的解决方案。相信在不久的将来,S7-200SMART将在各个行业得到更广泛的应用和推广。
以上相关代码,程序地址:http://wekup.cn/713719365959.html















 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









