







看了这么多篇显著性CVPR经典的显著性论文,真的是受益匪浅,每看一篇论文都觉得这方法实在是太棒了,都不知道怎么改善了,但是下一篇还是能用其他方法得到更好的效果,整个看论文的过程,也让我对图像显著性的发展有了一定的了解,再看多几篇自己也尝试写写这方面的论文,当然不要求能跟大神一样发个CVPR这类的会议,慢慢来,慢慢积累,每天有所进步就足够了,今天要介绍的这篇文章是2012年的文章,作者实验得出的效果比HC/RC的效果还要好,实际运行出来也可以看出效果很好,而且运行时间很快,想了解详情,那就跟我一起看看这篇论文吧。
1、算法介绍
本文方法主要在RC论文方法的一些缺点中提出了两个方面的改进,第一个为如何分割图像的问题,第二个为如何从超像素到单像素的过度。
①、图像分割
文章对图像的分割主要关注两个内容:保留相关的结构、去除不相关的细节;分割的单元通过相同的特性(如颜色)聚集到一起表示图像的某个区域,尺寸上大体上均匀,并且可以保持颜色边界。
算法最后采用略微修改的SLIC超像素分割,根据CIElab空间的测地线图像距离进行K-means聚类,产生大体上均匀尺寸,并且可以保持颜色边界的超像素分割
②、颜色独立性
基于一种假设:能够吸引我们注意的领域,和其他领域相比,会比较突出。这一假设在之前很多基于对比的显著性论文中都有提到,由于之前已经有过图像分割,所以图像一些小的纹理和噪声都变得无关紧要,而且算法不是在多尺度下进行,所以不会使显著性图像变模糊或者丧失重要信息。
第i个分割单元的位置和颜色值分别被定义为Pi和Ci,则可得下面公式:
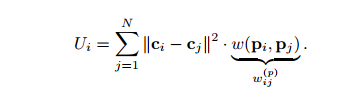
其中
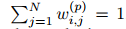
如果按照上面的式子进行计算,则需要O(N2)的复杂度,所以作者提出了高斯权值的问题,设
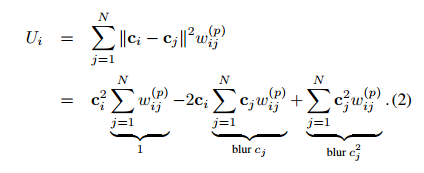
第一项的Σ结果是1,第二和第三项都可以看做是以ω为核的滤波器,分别对cj 和cj平方滤波。本文将这个核写成了高斯的形式,并且借助Adams提出的permutohedral lattice embedding 滤波器来实现线性时间的计算。
③、空间颜色分布
显著性意味着独立性,背景的颜色一般会分布在图片的各个方面,而前景的颜色一般会比较集中,这一假设在以往的论文中也有说到。
第i个分割单元的空间分布频率定义为Di,颜色为Ci,这个方法计算该单元在图像其他地方出现的频率,如果频率小,说明该单元比较紧凑,比较显著,因此可以用一下公式来表示这一假设
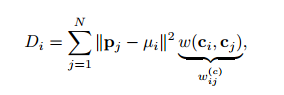
其中
同样,这个公式也可以写成高斯滤波的形式,借助Adams提出的permutohedral lattice embedding 滤波器来实现线性时间的计算,如下公式
其中

④、显著性分配
由②和③得到了Ui和Di,接下来将他们各自归一化,最终由下式获得每个单元的显著性
由于空间颜色分布的区分度更大,因此作者将其放在了指数的位置,并加了一个权重调节。Di越大即颜色分布越广,对应显著性值越小;Ui越大对应颜色独立性越高,对应显著性值越大。
最后我们要分配图像每个像素的显著性,而不是某个单元的显著性,定义

其中

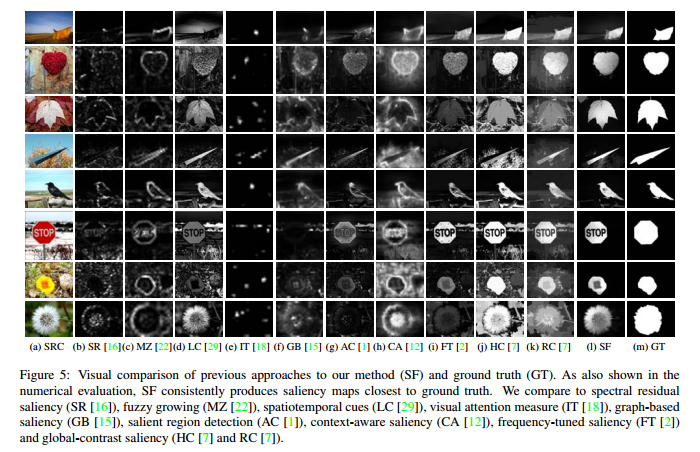
2、结论
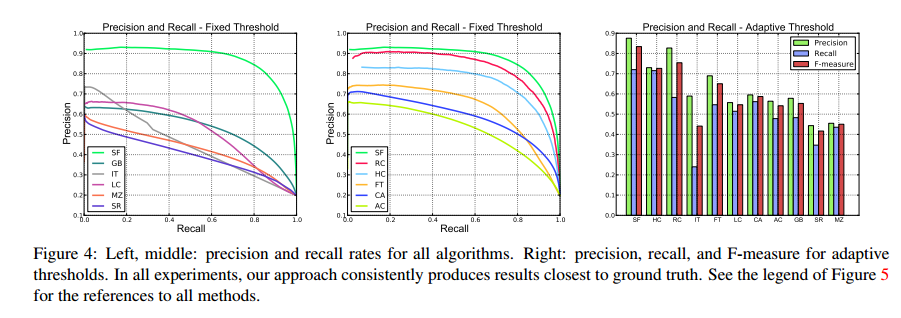
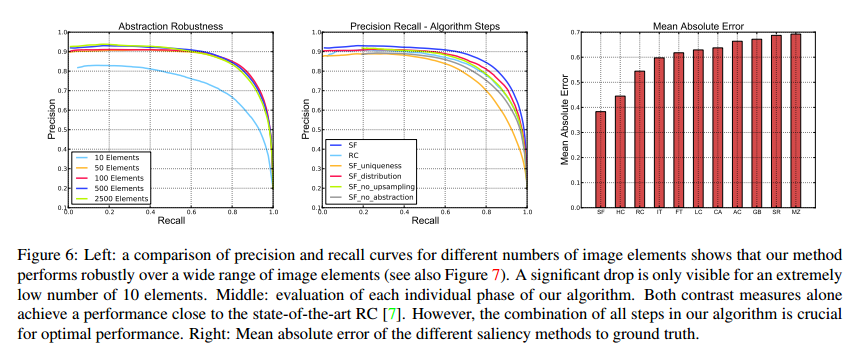
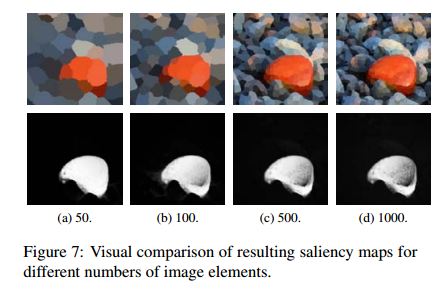
本文通过两个实验来体现本文算法在准确性和回召率的优势,第一种方法是通过固定阈值的方法,第二种方法是通过动态阈值的方法;得到的结果如下
作者还提出了平均绝对误差的方法来证明本文方法的优越性,方法如下:

结果如下
参考资料
1、Saliency Filters Contrast Based Filtering for Salient Region Detection
3、读论文:CVPR2012——Saliency Filter
4、代码下载
问题:
①、本文提到的图像分割方法没有接触,代码看不懂
②、本文提到的图像滤波方法,permutohedral lattice embedding 滤波器不懂,代码也没看懂















 3396
3396











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









