






我们平时开发,知道怎么调度api,怎么调起camera,怎么调用camera的实例来操作camera就可以了,但是这些调度的背后都做了什么事情,我们可能不太清楚,本文打算从openCamera这个调用谈起,展开说下camera调起之后底层是怎么工作的?
Camera操作过程中最重要的四个步骤:
- CameraManager-->openCamera ---> 打开相机
- CameraDeviceImpl-->createCaptureSession ---> 创建捕获会话
- CameraCaptureSession-->setRepeatingRequest ---> 设置预览界面
- CameraDeviceImpl-->capture ---> 开始捕获图片
1.CameraManager
CameraManager是本地的SystemService集合中一个service,在SystemServiceRegistry中注册:
registerService(Context.CAMERA_SERVICE, CameraManager.class,
new CachedServiceFetcher<CameraManager>() {
@Override
public CameraManager createService(ContextImpl ctx) {
return new CameraManager(ctx);
}});
SystemServiceRegistry中有两个HashMap集合来存储本地的SystemService数据,有一点要注意点一些,这和Binder的service不同,他们不是binder service,只是普通的调用模块,集成到一个本地service中,便于管理。
private static final HashMap<Class<?>, String> SYSTEM_SERVICE_NAMES =
new HashMap<Class<?>, String>();
private static final HashMap<String, ServiceFetcher<?>> SYSTEM_SERVICE_FETCHERS =
new HashMap<String, ServiceFetcher<?>>();
2.openCamera函数
CameraManager中两个openCamera(...),只是一个传入Handler,一个传入Executor,是想用线程池来执行Camera中耗时操作。
public void openCamera(@NonNull String cameraId,
@NonNull final CameraDevice.StateCallback callback, @Nullable Handler handler)
public void openCamera(@NonNull String cameraId,
@NonNull @CallbackExecutor Executor executor,
@NonNull final CameraDevice.StateCallback callback)
- cameraId 是一个标识,标识当前要打开的camera
- callback 是一个状态回调,当前camera被打开的时候,这个状态回调会被触发的。
- handler 是传入的一个执行耗时操作的handler
- executor 操作线程池
了解一下openCamera的调用流程:
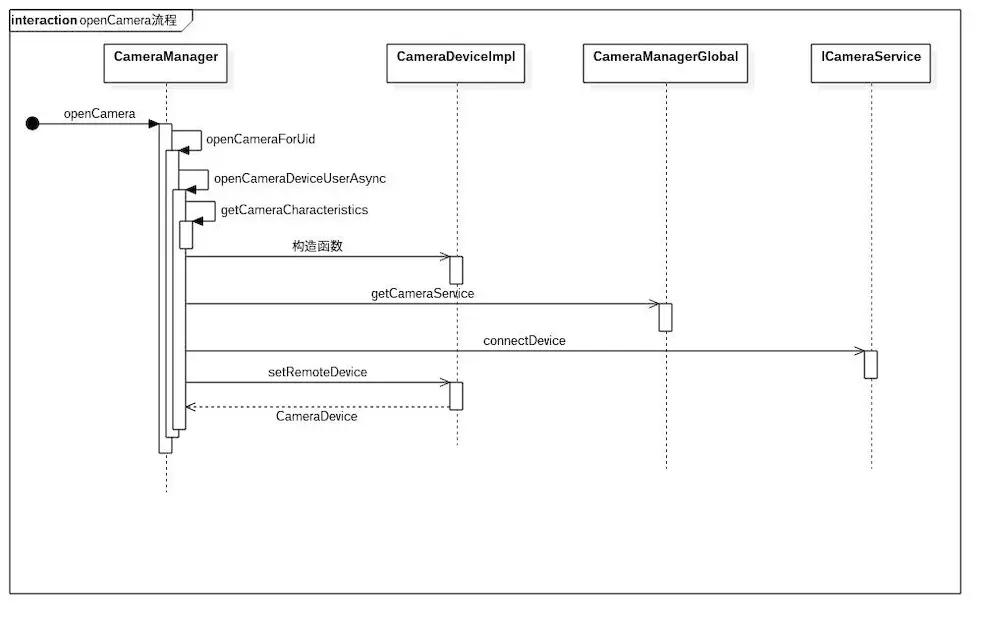
openCamera流程.jpg
2.1 openCameraDeviceUserAsync函数
private CameraDevice openCameraDeviceUserAsync(String cameraId,
CameraDevice.StateCallback callback, Executor executor, final int uid)
throws CameraAccessException
{
//......
}
返回值是CameraDevice,从《Android Camera模块解析之拍照》中讲解了Camera framework模块中主要类之间的关系,CameraDevice是抽象类,CameraDeviceImpl是其实现类,就是要获取CameraDeviceImpl的实例。
这个函数的主要作用就是到底层获取相机设备的信息,并获取当前指定cameraId的设备实例。
本函数的主要工作可以分为下面五点:
- 获取当前cameraId指定相机的设备信息
- 利用获取相机的设备信息创建CameraDeviceImpl实例
- 调用远程CameraService获取当前相机的远程服务
- 将获取的远程服务设置到CameraDeviceImpl实例中
- 返回CameraDeviceImpl实例
2.2 获取当前cameraId指定相机的设备信息
CameraCharacteristics characteristics = getCameraCharacteristics(cameraId);
一句简单的调用,返回值是CameraCharacteristics,CameraCharacteristics提供了CameraDevice的各种属性,可以通过getCameraCharacteristics函数来查询。
public CameraCharacteristics getCameraCharacteristics(@NonNull String cameraId)
throws CameraAccessException {
CameraCharacteristics characteristics = null;
if (CameraManagerGlobal.sCameraServiceDisabled) {
throw new IllegalArgumentException("No cameras available on device");
}
synchronized (mLock) {
ICameraService cameraService = CameraManagerGlobal.get().getCameraService();
if (cameraService == null) {
throw new CameraAccessException(CameraAccessException.CAMERA_DISCONNECTED,
"Camera service is currently unavailable");
}
try {
if (!supportsCamera2ApiLocked(cameraId)) {
int id = Integer.parseInt(cameraId);
String parameters = cameraService.getLegacyParameters(id);
CameraInfo info = cameraService.getCameraInfo(id);
characteristics = LegacyMetadataMapper.createCharacteristics(parameters, info);
} else {
CameraMetadataNative info = cameraService.getCameraCharacteristics(cameraId);
characteristics = new CameraCharacteristics(info);
}
} catch (ServiceSpecificException e) {
throwAsPublicException(e);
} catch (RemoteException e) {
throw new CameraAccessException(CameraAccessException.CAMERA_DISCONNECTED,
"Camera service is currently unavailable", e);
}
}
return characteristics;
}
一个关键的函数----> supportsCamera2ApiLocked(cameraId),这个函数的意思是 当前camera服务是否支持camera2 api,如果支持,返回true,如果不支持,返回false。
private boolean supportsCameraApiLocked(String cameraId, int apiVersion) {
/*
* Possible return values:
* - NO_ERROR => CameraX API is supported
* - CAMERA_DEPRECATED_HAL => CameraX API is *not* supported (thrown as an exception)
* - Remote exception => If the camera service died
*
* Anything else is an unexpected error we don't want to recover from.
*/
try {
ICameraService cameraService = CameraManagerGlobal.get().getCameraService();
// If no camera service, no support
if (cameraService == null) return false;
return cameraService.supportsCameraApi(cameraId, apiVersion);
} catch (RemoteException e) {
// Camera service is now down, no support for any API level
}
return false;
}
调用的CameraService对应的是ICameraService.aidl,对应的实现类在frameworks/av/services/camera/libcameraservice/CameraService.h
下面是CameraManager与CameraService之间的连接关系图示:
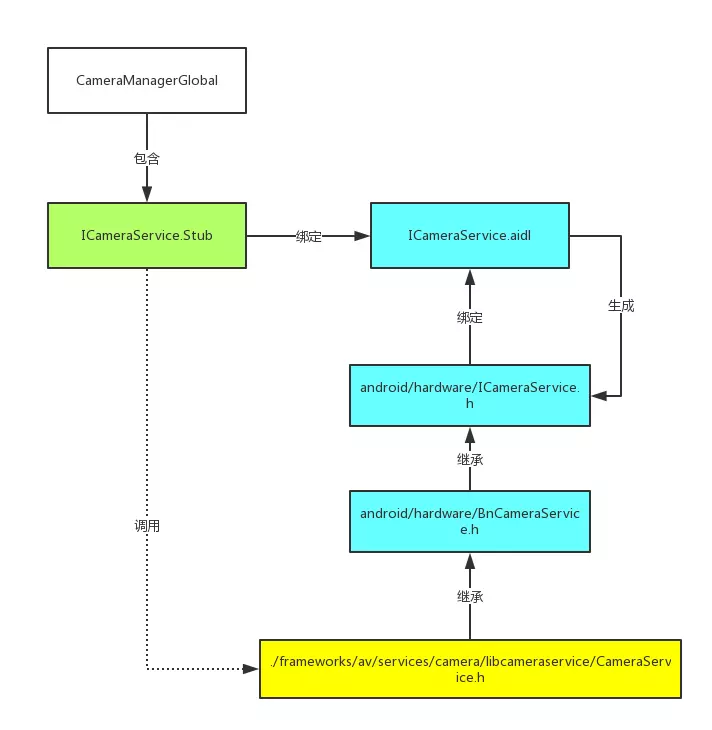
CameraService生成.jpg
CameraManagerGlobal是CameraManager中的内部类,服务端在native层,《Android Camera模块解析之拍照》中camera2介绍的时候已经说明了当前cameraservice是放在frameworks/av/services/camera/libcameraservice/中的,编译好了之后会生成一个libcameraservices.so的共享库。熟悉camera代码,首先应该熟悉camera架构的代码。
这儿监测的是当前camera架构是基于HAL什么版本的,看下面的switch判断:
- 当前device是基于HAL1.0 HAL3.0 HAL3.1,并且apiversion不是API_VERSION_2,此时支持,这里要搞清楚了,这里的API_VERSION_2不是api level 2,而是camera1还是camera2.
- 当前device是基于HAL3.2 HAL3.3 HAL3.4,此时支持
- 目前android版本,正常情况下都是支持camera2的
Status CameraService::supportsCameraApi(const String16& cameraId, int apiVersion,
/*out*/ bool *isSupported) {
ATRACE_CALL();
const String8 id = String8(cameraId);
ALOGV("%s: for camera ID = %s", __FUNCTION__, id.string());
switch (apiVersion) {
case API_VERSION_1:
case API_VERSION_2:
break;
default:
String8 msg = String8::format("Unknown API version %d", apiVersion);
ALOGE("%s: %s", __FUNCTION__, msg.string());
return STATUS_ERROR(ERROR_ILLEGAL_ARGUMENT, msg.string());
}
int deviceVersion = getDeviceVersion(id);
switch(deviceVersion) {
case CAMERA_DEVICE_API_VERSION_1_0:
case CAMERA_DEVICE_API_VERSION_3_0:
case CAMERA_DEVICE_API_VERSION_3_1:
if (apiVersion == API_VERSION_2) {
ALOGV("%s: Camera id %s uses HAL version %d <3.2, doesn't support api2 without shim",
__FUNCTION__, id.string(), deviceVersion);
*isSupported = false;
} else { // if (apiVersion == API_VERSION_1) {
ALOGV("%s: Camera id %s uses older HAL before 3.2, but api1 is always supported",
__FUNCTION__, id.string());
*isSupported = true;
}
break;
case CAMERA_DEVICE_API_VERSION_3_2:
case CAMERA_DEVICE_API_VERSION_3_3:
case CAMERA_DEVICE_API_VERSION_3_4:
ALOGV("%s: Camera id %s uses HAL3.2 or newer, supports api1/api2 directly",
__FUNCTION__, id.string());
*isSupported = true;
break;
case -1: {
String8 msg = String8::format("Unknown camera ID %s", id.string());
ALOGE("%s: %s", __FUNCTION__, msg.string());
return STATUS_ERROR(ERROR_ILLEGAL_ARGUMENT, msg.string());
}
default: {
String8 msg = String8::format("Unknown device version %x for device %s",
deviceVersion, id.string());
ALOGE("%s: %s", __FUNCTION__, msg.string());
return STATUS_ERROR(ERROR_INVALID_OPERATION, msg.string());
}
}
return Status::ok();
}
采用camera2 api来获取相机设备的信息。
CameraMetadataNative info = cameraService.getCameraCharacteristics(cameraId);
characteristics = new CameraCharacteristics(info);
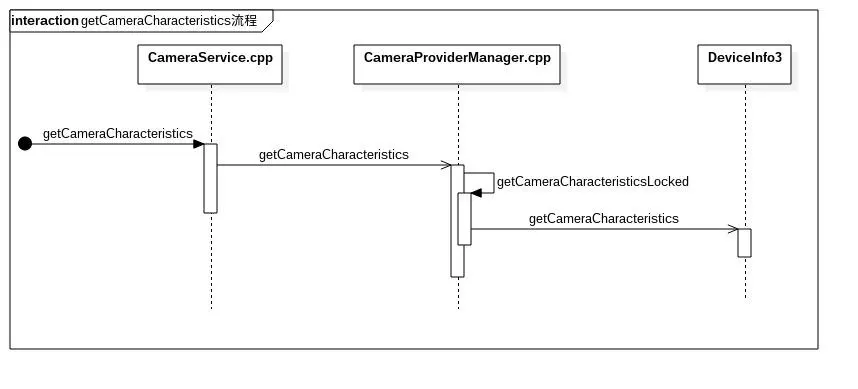
getCameraCharacteristics调用流程.jpg
其中DeviceInfo3是CameraProviderManager::ProviderInfo::DeviceInfo3,CameraProviderManager中的结构体,最终返回的是CameraMetadata类型,它是一个Parcelable类型,native中对应的代码是frameworks/av/camera/include/camera/CameraMetadata.h,java中对应的是frameworks/base/core/java/android/hardware/camera2/impl/CameraMetadataNative.java,Parcelable类型是可以跨进程传输的。下面是在native中定义CameraMetadata为CameraMetadataNative
namespace hardware {
namespace camera2 {
namespace impl {
using ::android::CameraMetadata;
typedef CameraMetadata CameraMetadataNative;
}
}
}
我们关注其中的一个调用函数:
status_t CameraProviderManager::getCameraCharacteristicsLocked(const std::string &id,
CameraMetadata* characteristics) const {
auto deviceInfo = findDeviceInfoLocked(id, /*minVersion*/ {3,0}, /*maxVersion*/ {4,0});
if (deviceInfo == nullptr) return NAME_NOT_FOUND;
return deviceInfo->getCameraCharacteristics(characteristics);
}
发现了调用了一个findDeviceInfoLocked(...)函数,返回类型是一个DeviceInfo结构体,CameraProviderManager.h中定义了三个DeviceInfo结构体,除了DeviceInfo之外,还有DeviceInfo1与DeviceInfo3,他们都继承DeviceInfo,其中DeviceInfo1为HALv1服务,DeviceInfo3为HALv3-specific服务,都是提供camera device一些基本信息。这里主要看下findDeviceInfoLocked(...)函数:
CameraProviderManager::ProviderInfo::DeviceInfo* CameraProviderManager::findDeviceInfoLocked(
const std::string& id,
hardware::hidl_version minVersion, hardware::hidl_version maxVersion) const {
for (auto& provider : mProviders) {
for (auto& deviceInfo : provider->mDevices) {
if (deviceInfo->mId == id &&
minVersion <= deviceInfo->mVersion && maxVersion >= deviceInfo->mVersion) {
return deviceInfo.get();
}
}
}
return nullptr;
}
这儿的是mProviders是ProviderInfo类型的列表,这个ProviderInfo也是CameraProviderManager.h中定义的结构体,并且上面3种DeviceInfo都是定义在ProviderInfo里面的。下面给出了ProviderInfo的代码大纲,裁剪了很多代码,但是我们还是能看到核心的代码:ProviderInfo是管理当前手机的camera device设备的,通过addDevice保存在mDevices中,接下来我们看下这个addDevice是如何工作的。
struct ProviderInfo :
virtual public hardware::camera::provider::V2_4::ICameraProviderCallback,
virtual public hardware::hidl_death_recipient
{
//......
ProviderInfo(const std::string &providerName,
sp<hardware::camera::provider::V2_4::ICameraProvider>& interface,
CameraProviderManager *manager);
~ProviderInfo();
status_t initialize();
const std::string& getType() const;
status_t addDevice(const std::string& name,
hardware::camera::common::V1_0::CameraDeviceStatus initialStatus =
hardware::camera::common::V1_0::CameraDeviceStatus::PRESENT,
/*out*/ std::string *parsedId = nullptr);
// ICameraProviderCallbacks interface - these lock the parent mInterfaceMutex
virtual hardware::Return<void> cameraDeviceStatusChange(
const hardware::hidl_string& cameraDeviceName,
hardware::camera::common::V1_0::CameraDeviceStatus newStatus) override;
virtual hardware::Return<void> torchModeStatusChange(
const hardware::hidl_string& cameraDeviceName,
hardware::camera::common::V1_0::TorchModeStatus newStatus) override;
// hidl_death_recipient interface - this locks the parent mInterfaceMutex
virtual void serviceDied(uint64_t cookie, const wp<hidl::base::V1_0::IBase>& who) override;
// Basic device information, common to all camera devices
struct DeviceInfo {
//......
};
std::vector<std::unique_ptr<DeviceInfo>> mDevices;
std::unordered_set<std::string> mUniqueCameraIds;
int mUniqueDeviceCount;
// HALv1-specific camera fields, including the actual device interface
struct DeviceInfo1 : public DeviceInfo {
//......
};
// HALv3-specific camera fields, including the actual device interface
struct DeviceInfo3 : public DeviceInfo {
//......
};
private:
void removeDevice(std::string id);
};
- mProviders是如何添加的?
- addDevice是如何工作的?
mProviders添加的流程:
1.CameraService --> onFirstRef()
2.CameraService --> enumerateProviders()
3.CameraProviderManager --> initialize(this)
initialize(...)函数原型是:
status_t initialize(wp<StatusListener> listener,
ServiceInteractionProxy *proxy = &sHardwareServiceInteractionProxy);
第2个参数默认是sHardwareServiceInteractionProxy类型,
struct ServiceInteractionProxy {
virtual bool registerForNotifications(
const std::string &serviceName,
const sp<hidl::manager::V1_0::IServiceNotification>
¬ification) = 0;
virtual sp<hardware::camera::provider::V2_4::ICameraProvider> getService(
const std::string &serviceName) = 0;
virtual ~ServiceInteractionProxy() {}
};
// Standard use case - call into the normal generated static methods which invoke
// the real hardware service manager
struct HardwareServiceInteractionProxy : public ServiceInteractionProxy {
virtual bool registerForNotifications(
const std::string &serviceName,
const sp<hidl::manager::V1_0::IServiceNotification>
¬ification) override {
return hardware::camera::provider::V2_4::ICameraProvider::registerForNotifications(
serviceName, notification);
}
virtual sp<hardware::camera::provider::V2_4::ICameraProvider> getService(
const std::string &serviceName) override {
return hardware::camera::provider::V2_4::ICameraProvider::getService(serviceName);
}
};
hardware::camera::provider::V2_4::ICameraProvider::getService(serviceName)出处在./hardware/interfaces/camera/provider/2.4/default/CameraProvider.cpp,传入的参数可能是下面两种的一个:
const std::string kLegacyProviderName("legacy/0"); 代表 HALv1
const std::string kExternalProviderName("external/0"); 代码HALv3-specific
ICameraProvider* HIDL_FETCH_ICameraProvider(const char* name) {
if (strcmp(name, kLegacyProviderName) == 0) {
CameraProvider* provider = new CameraProvider();
if (provider == nullptr) {
ALOGE("%s: cannot allocate camera provider!", __FUNCTION__);
return nullptr;
}
if (provider->isInitFailed()) {
ALOGE("%s: camera provider init failed!", __FUNCTION__);
delete provider;
return nullptr;
}
return provider;
} else if (strcmp(name, kExternalProviderName) == 0) {
ExternalCameraProvider* provider = new ExternalCameraProvider();
return provider;
}
ALOGE("%s: unknown instance name: %s", __FUNCTION__, name);
return nullptr;
}
addDevice是如何工作的?
1.CameraProviderManager::ProviderInfo::initialize()初始化的时候是检查当前的camera device,检查的执行函数是:
std::vector<std::string> devices;
hardware::Return<void> ret = mInterface->getCameraIdList([&status, &devices](
Status idStatus,
const hardware::hidl_vec<hardware::hidl_string>& cameraDeviceNames) {
status = idStatus;
if (status == Status::OK) {
for (size_t i = 0; i < cameraDeviceNames.size(); i++) {
devices.push_back(cameraDeviceNames[i]);
}
} });
最终调用到./hardware/interfaces/camera/provider/2.4/default/CameraProvider.cpp中的getCameraIdList函数:CAMERA_DEVICE_STATUS_PRESENT表明当前的camera是可用的,mCameraStatusMap存储了所有的camera 设备列表。
Return<void> CameraProvider::getCameraIdList(getCameraIdList_cb _hidl_cb) {
std::vector<hidl_string> deviceNameList;
for (auto const& deviceNamePair : mCameraDeviceNames) {
if (mCameraStatusMap[deviceNamePair.first] == CAMERA_DEVICE_STATUS_PRESENT) {
deviceNameList.push_back(deviceNamePair.second);
}
}
hidl_vec<hidl_string> hidlDeviceNameList(deviceNameList);
_hidl_cb(Status::OK, hidlDeviceNameList);
return Void();
}
我们理一下整体的调用结构:
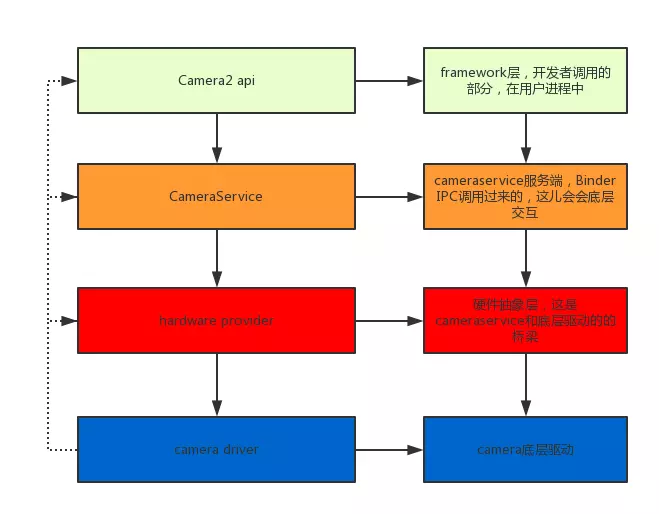
Camera分层体系.jpg
1.上面谈的camera2 api就是在framework层的,在应用程序进程中。
2.CameraService,是camera2 api binder IPC通信方式调用到服务端的,camera相关的操作都在在服务端进行。所在的位置就是./frameworks/av/services/camera/下面
3.服务端也只是一个桥梁,service也会调用到HAL,硬件抽象层,具体位置在./hardware/interfaces/camera/provider/2.4
4.camera driver,底层的驱动层了,这是真正操作硬件的地方。
2.3 利用获取相机的设备信息创建CameraDeviceImpl实例
android.hardware.camera2.impl.CameraDeviceImpl deviceImpl =
new android.hardware.camera2.impl.CameraDeviceImpl(
cameraId,
callback,
executor,
characteristics,
mContext.getApplicationInfo().targetSdkVersion);
创建CameraDevice实例,传入了刚刚获取的characteristics参数(camera设备信息赋值为CameraDevice实例)。这个实例接下来还是使用,使用的时候再谈一下。
2.4 调用远程CameraService获取当前相机的远程服务
// Use cameraservice's cameradeviceclient implementation for HAL3.2+ devices
ICameraService cameraService = CameraManagerGlobal.get().getCameraService();
if (cameraService == null) {
throw new ServiceSpecificException(
ICameraService.ERROR_DISCONNECTED,
"Camera service is currently unavailable");
}
cameraUser = cameraService.connectDevice(callbacks, cameraId,
mContext.getOpPackageName(), uid);
这个函数的主要目的就是连接当前的cameraDevice设备。调用到CameraService::connectDevice中。
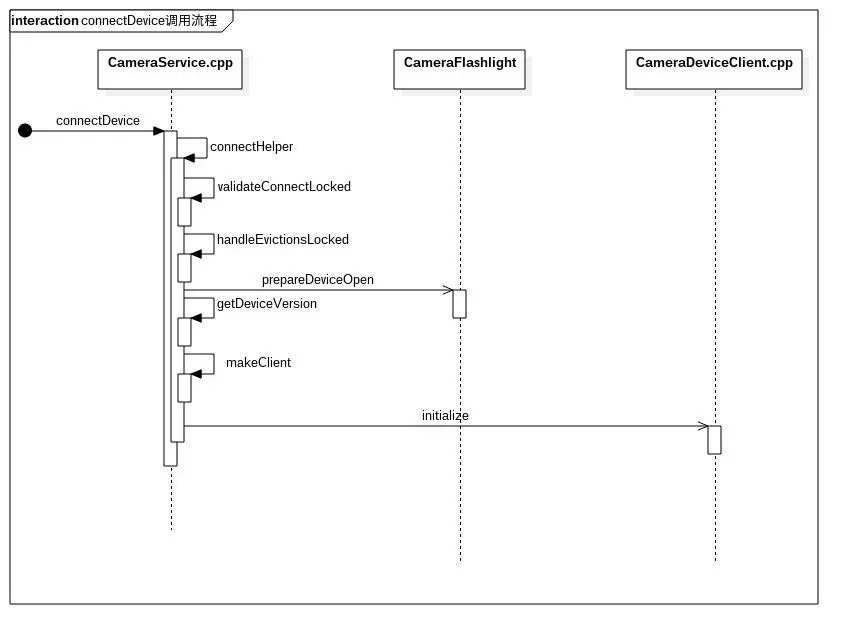
connectDevice调用流程.jpg
Status CameraService::connectDevice(
const sp<hardware::camera2::ICameraDeviceCallbacks>& cameraCb,
const String16& cameraId,
const String16& clientPackageName,
int clientUid,
/*out*/
sp<hardware::camera2::ICameraDeviceUser>* device) {
ATRACE_CALL();
Status ret = Status::ok();
String8 id = String8(cameraId);
sp<CameraDeviceClient> client = nullptr;
ret = connectHelper<hardware::camera2::ICameraDeviceCallbacks,CameraDeviceClient>(cameraCb, id,
/*api1CameraId*/-1,
CAMERA_HAL_API_VERSION_UNSPECIFIED, clientPackageName,
clientUid, USE_CALLING_PID, API_2,
/*legacyMode*/ false, /*shimUpdateOnly*/ false,
/*out*/client);
if(!ret.isOk()) {
logRejected(id, getCallingPid(), String8(clientPackageName),
ret.toString8());
return ret;
}
*device = client;
return ret;
}
- connectDevice函数的第5个参数就是当前binder ipc的返回值,我们connectDevice之后,会得到一个cameraDeviceClient对象,这个对象会返回到应用程序进程中。我们接下来主要看看这个对象是如何生成的。
- validateConnectLocked:检查当前的camera device是否可用,这儿的判断比较简单,只是简单判断当前设备是否存在。
- handleEvictionsLocked:处理camera独占情况,主要的工作是当前的cameradevice如果已经被其他的设备使用了,或者是否有比当前调用优先级更高的调用等等,在执行完这个函数之后,才能完全判断当前的camera device是可用的,并且开始获取camera device的一些信息开始工作了。
- CameraFlashlight-->prepareDeviceOpen:此时准备连接camera device 了,需要判断一下如果当前的camera device有可用的flashlight,那就要开始准备好了,但是flashlight被占用的那就没有办法了。只是一个通知作用。
- getDeviceVersion:判断一下当前的camera device的version 版本,主要判断在CameraProviderManager::getHighestSupportedVersion函数中,这个函数中将camera device支持的最高和最低版本查清楚,然后我们判断当前的camera facing,只有两种情况CAMERA_FACING_BACK = 0与CAMERA_FACING_FRONT = 1,这些都是先置判断条件,只有这些检查都通过,说明当前camera device是确实可用的。
- makeClient:是根据当前的CAMERA_DEVICE_API_VERSION来判断的,当前最新的HAL架构都是基于HALv3的,所以我们采用的client都是CameraDeviceClient
Status CameraService::makeClient(const sp<CameraService>& cameraService,
const sp<IInterface>& cameraCb, const String16& packageName, const String8& cameraId,
int api1CameraId, int facing, int clientPid, uid_t clientUid, int servicePid,
bool legacyMode, int halVersion, int deviceVersion, apiLevel effectiveApiLevel,
/*out*/sp<BasicClient>* client) {
if (halVersion < 0 || halVersion == deviceVersion) {
// Default path: HAL version is unspecified by caller, create CameraClient
// based on device version reported by the HAL.
switch(deviceVersion) {
case CAMERA_DEVICE_API_VERSION_1_0:
if (effectiveApiLevel == API_1) { // Camera1 API route
sp<ICameraClient> tmp = static_cast<ICameraClient*>(cameraCb.get());
*client = new CameraClient(cameraService, tmp, packageName,
api1CameraId, facing, clientPid, clientUid,
getpid(), legacyMode);
} else { // Camera2 API route
ALOGW("Camera using old HAL version: %d", deviceVersion);
return STATUS_ERROR_FMT(ERROR_DEPRECATED_HAL,
"Camera device \"%s\" HAL version %d does not support camera2 API",
cameraId.string(), deviceVersion);
}
break;
case CAMERA_DEVICE_API_VERSION_3_0:
case CAMERA_DEVICE_API_VERSION_3_1:
case CAMERA_DEVICE_API_VERSION_3_2:
case CAMERA_DEVICE_API_VERSION_3_3:
case CAMERA_DEVICE_API_VERSION_3_4:
if (effectiveApiLevel == API_1) { // Camera1 API route
sp<ICameraClient> tmp = static_cast<ICameraClient*>(cameraCb.get());
*client = new Camera2Client(cameraService, tmp, packageName,
cameraId, api1CameraId,
facing, clientPid, clientUid,
servicePid, legacyMode);
} else { // Camera2 API route
sp<hardware::camera2::ICameraDeviceCallbacks> tmp =
static_cast<hardware::camera2::ICameraDeviceCallbacks*>(cameraCb.get());
*client = new CameraDeviceClient(cameraService, tmp, packageName, cameraId,
facing, clientPid, clientUid, servicePid);
}
break;
default:
// Should not be reachable
ALOGE("Unknown camera device HAL version: %d", deviceVersion);
return STATUS_ERROR_FMT(ERROR_INVALID_OPERATION,
"Camera device \"%s\" has unknown HAL version %d",
cameraId.string(), deviceVersion);
}
} else {
// A particular HAL version is requested by caller. Create CameraClient
// based on the requested HAL version.
if (deviceVersion > CAMERA_DEVICE_API_VERSION_1_0 &&
halVersion == CAMERA_DEVICE_API_VERSION_1_0) {
// Only support higher HAL version device opened as HAL1.0 device.
sp<ICameraClient> tmp = static_cast<ICameraClient*>(cameraCb.get());
*client = new CameraClient(cameraService, tmp, packageName,
api1CameraId, facing, clientPid, clientUid,
servicePid, legacyMode);
} else {
// Other combinations (e.g. HAL3.x open as HAL2.x) are not supported yet.
ALOGE("Invalid camera HAL version %x: HAL %x device can only be"
" opened as HAL %x device", halVersion, deviceVersion,
CAMERA_DEVICE_API_VERSION_1_0);
return STATUS_ERROR_FMT(ERROR_ILLEGAL_ARGUMENT,
"Camera device \"%s\" (HAL version %d) cannot be opened as HAL version %d",
cameraId.string(), deviceVersion, halVersion);
}
}
return Status::ok();
}
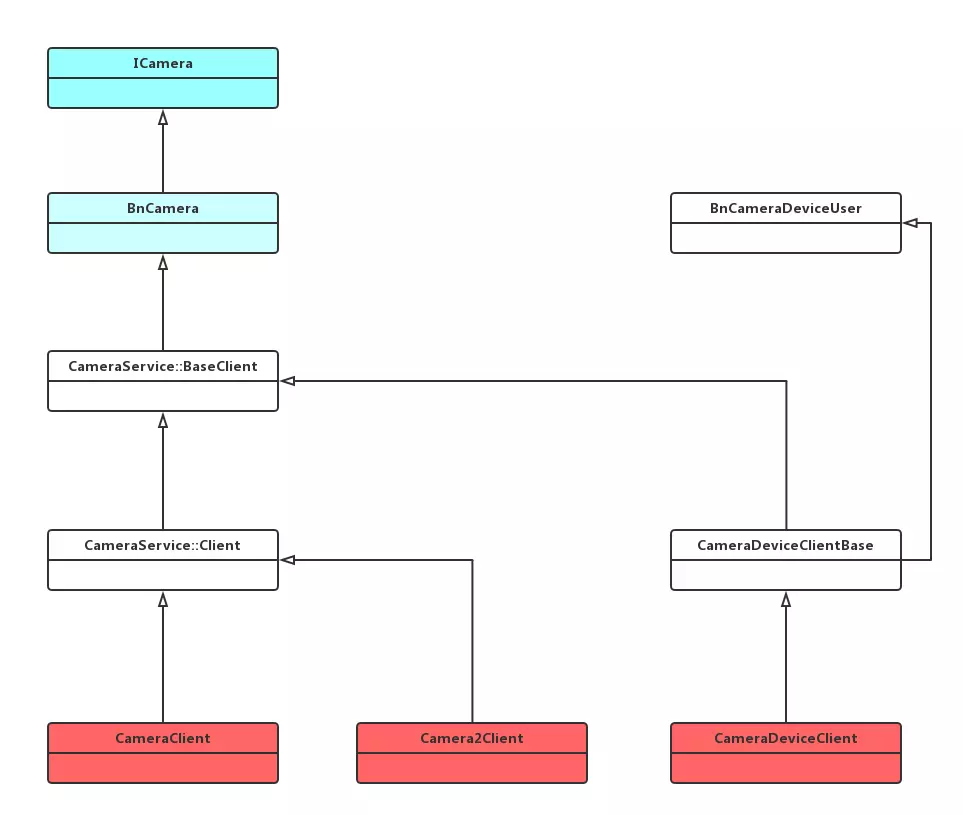
CameraClient.jpg
CameraClient与Camera2Client是之前系统版本使用的camera client对象,现在都使用CameraDeviceClient了
BnCamera --> ./frameworks/av/camera/include/camera/android/hardware/ICamera.h
ICamera --> ./frameworks/av/camera/include/camera/android/hardware/ICamera.h
BnCameraDeviceUser --> android/hardware/camera2/BnCameraDeviceUser.h 这是ICameraDeviceUser.aidl自动生成的binder 对象。所以最终得到的client对象就是ICameraDeviceUser.Stub对象。
2.5 将获取的远程服务设置到CameraDeviceImpl实例中
deviceImpl.setRemoteDevice(cameraUser);
device = deviceImpl;
这个cameraUser就是cameraservice端设置的ICameraDeviceUser.Stub对象,
public void setRemoteDevice(ICameraDeviceUser remoteDevice) throws CameraAccessException {
synchronized(mInterfaceLock) {
// TODO: Move from decorator to direct binder-mediated exceptions
// If setRemoteFailure already called, do nothing
if (mInError) return;
mRemoteDevice = new ICameraDeviceUserWrapper(remoteDevice);
IBinder remoteDeviceBinder = remoteDevice.asBinder();
// For legacy camera device, remoteDevice is in the same process, and
// asBinder returns NULL.
if (remoteDeviceBinder != null) {
try {
remoteDeviceBinder.linkToDeath(this, /*flag*/ 0);
} catch (RemoteException e) {
CameraDeviceImpl.this.mDeviceExecutor.execute(mCallOnDisconnected);
throw new CameraAccessException(CameraAccessException.CAMERA_DISCONNECTED,
"The camera device has encountered a serious error");
}
}
mDeviceExecutor.execute(mCallOnOpened);
mDeviceExecutor.execute(mCallOnUnconfigured);
}
}
这个mRemoteDevice是应用程序进程和android camera service端之间链接的桥梁,上层操作camera的方法会通过调用mRemoteDevice来调用到camera service端来实现操作底层camera驱动的目的。
小结
本文通过我们熟知的openCamera函数讲起,openCamera串起应用程序和cameraService之间的联系,通过研究cameraservice代码,我们知道了底层是如何通过HAL调用camera驱动设备的。下面会逐渐深入讲解camera底层知识,不足之处,敬请谅解。















 6932
6932

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









