







线性系统串联校正
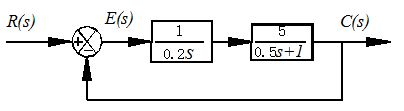
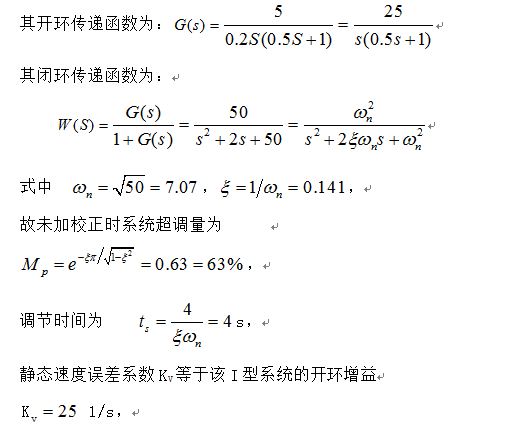
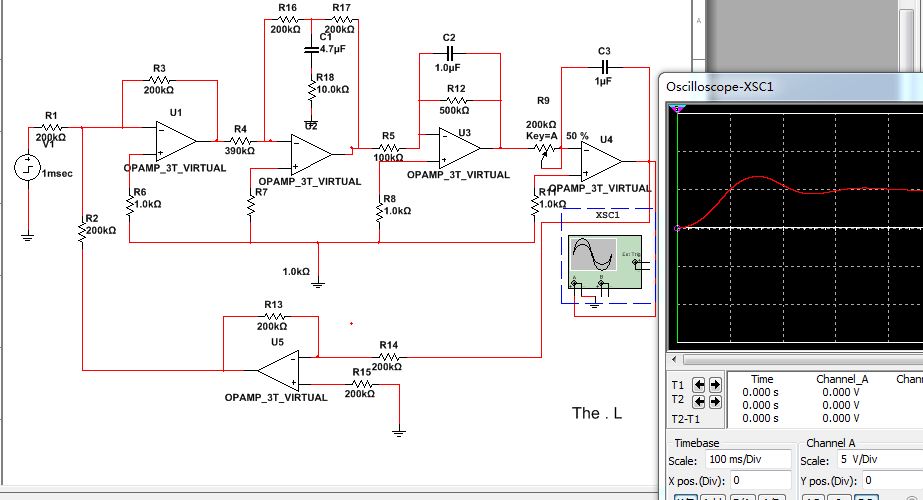
对该模型进行matlab仿真
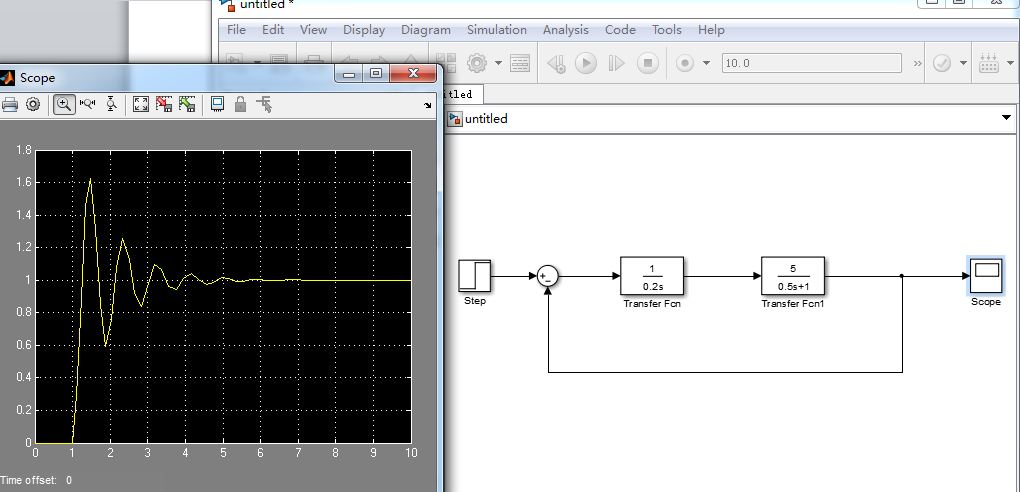
串联校正的目标
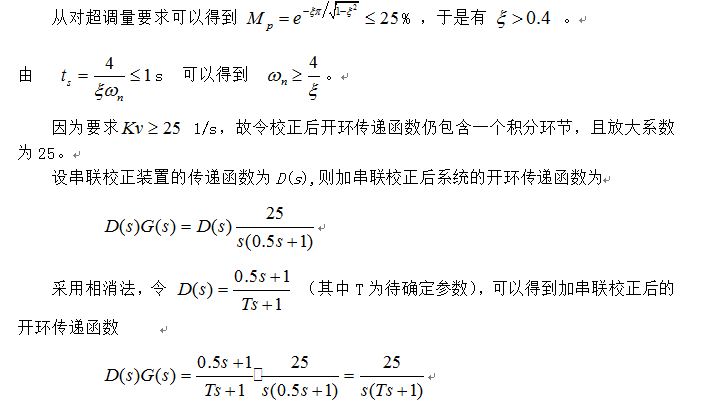
要求加串联校正装置后系统满足以下性能指标:
(1)超调量 Mp <= 25%
(2)调节时间(过渡过程时间)ts = 1s
(3)校正后系统开环增益(静态速度误差系数)Kv >=25 1/s
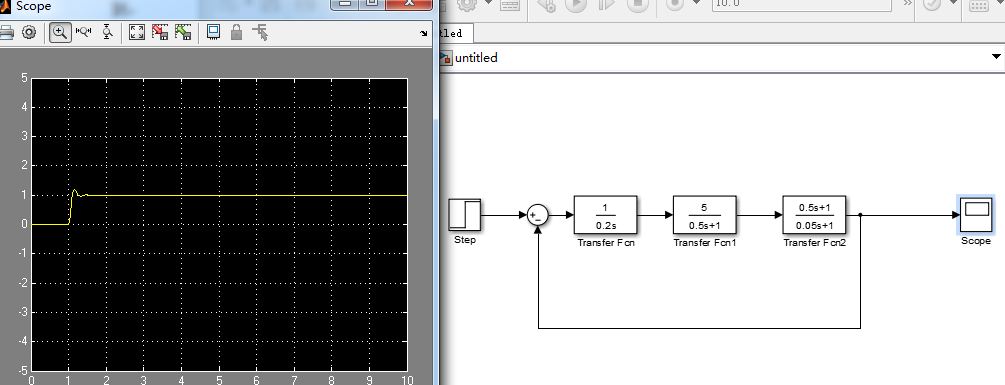
矫正效果很好的说。。。。
下面分析一下设计串联矫正的过程
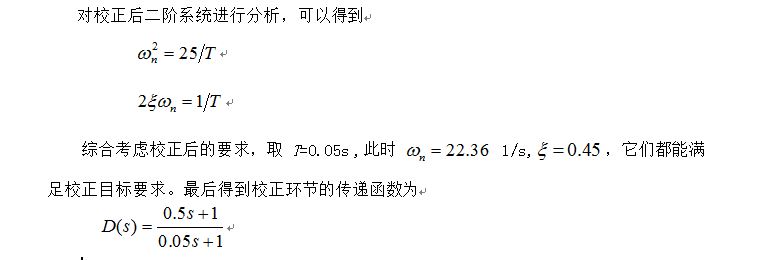
于是这样就得到了矫正环节的函数!
multisim仿真目前没时间做了,有时间再update。
update: 2014.05.20 下午 5点
话说今天自控实验还有点意思,因为木有忽悠过去。。。认真做的


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









