






道中心线。
文章标题:车辆动力学仿真模型及车道保持与路径跟踪控制项目研究
一、项目1:基于纵向动力学的后轮驱动电动乘用车模型
在汽车技术日新月异的今天,电动乘用车凭借其环保、经济等优势成为汽车工业的新宠。基于纵向动力学的后轮驱动电动乘用车模型的研究,是为了更好地理解和掌握电动汽车的行驶性能,并对其进行精确的仿真分析。
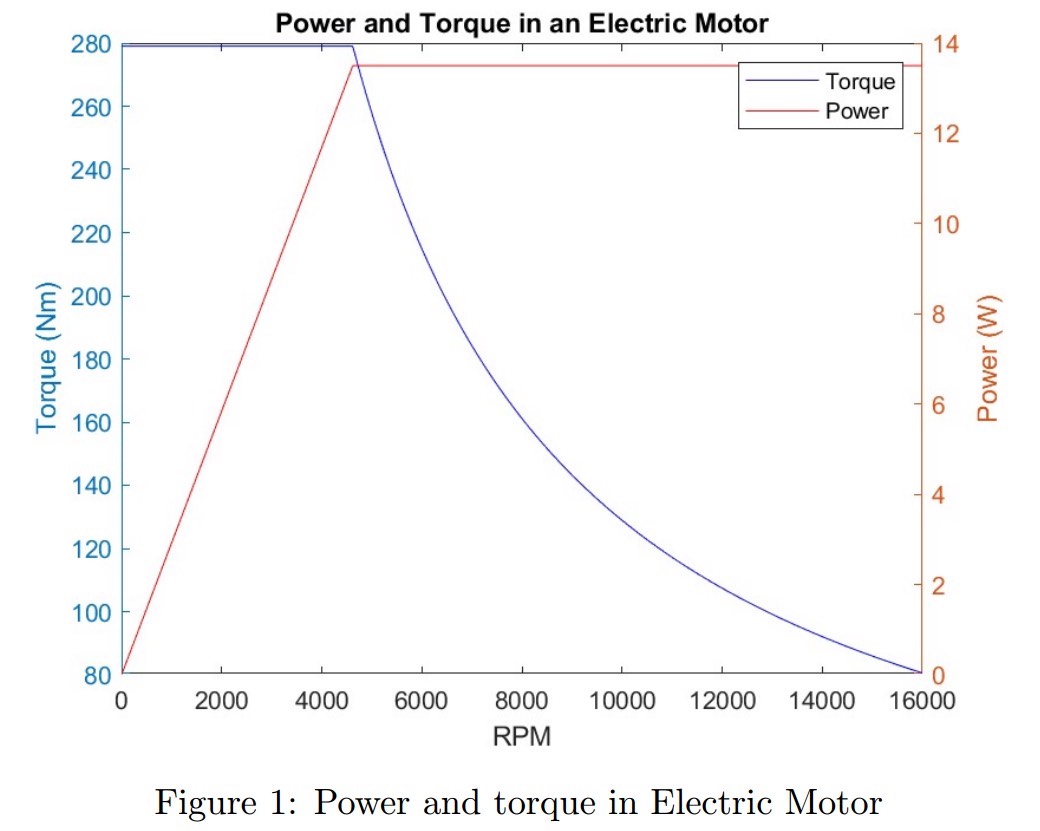
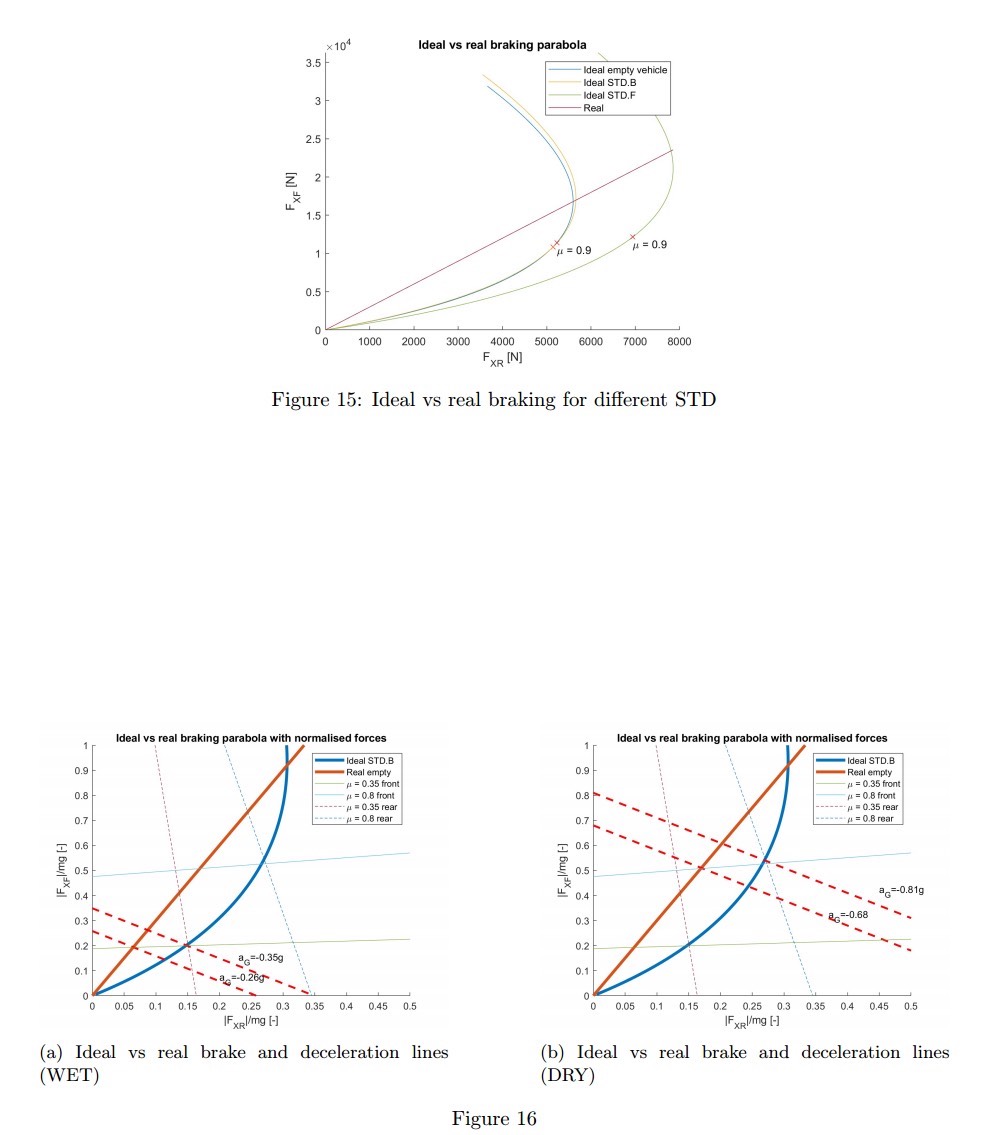
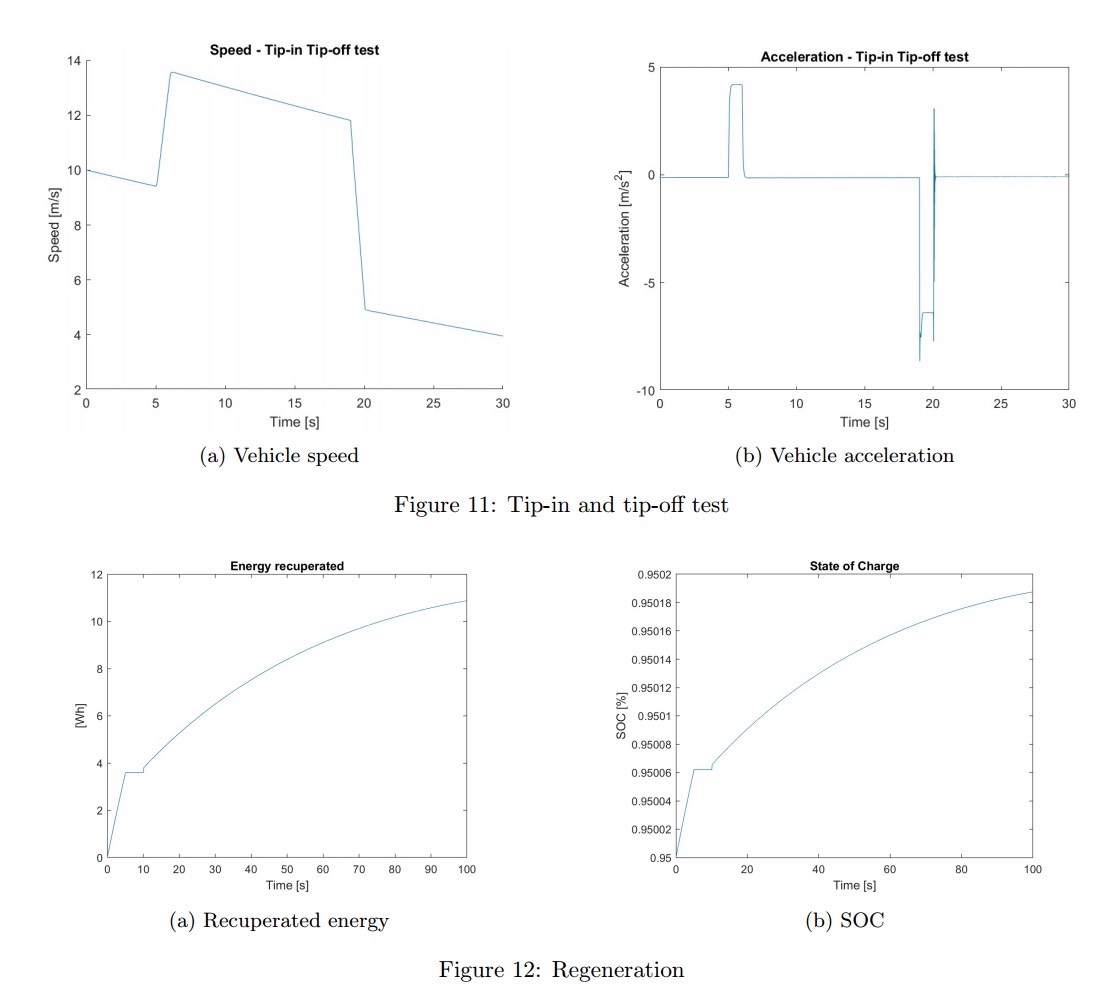
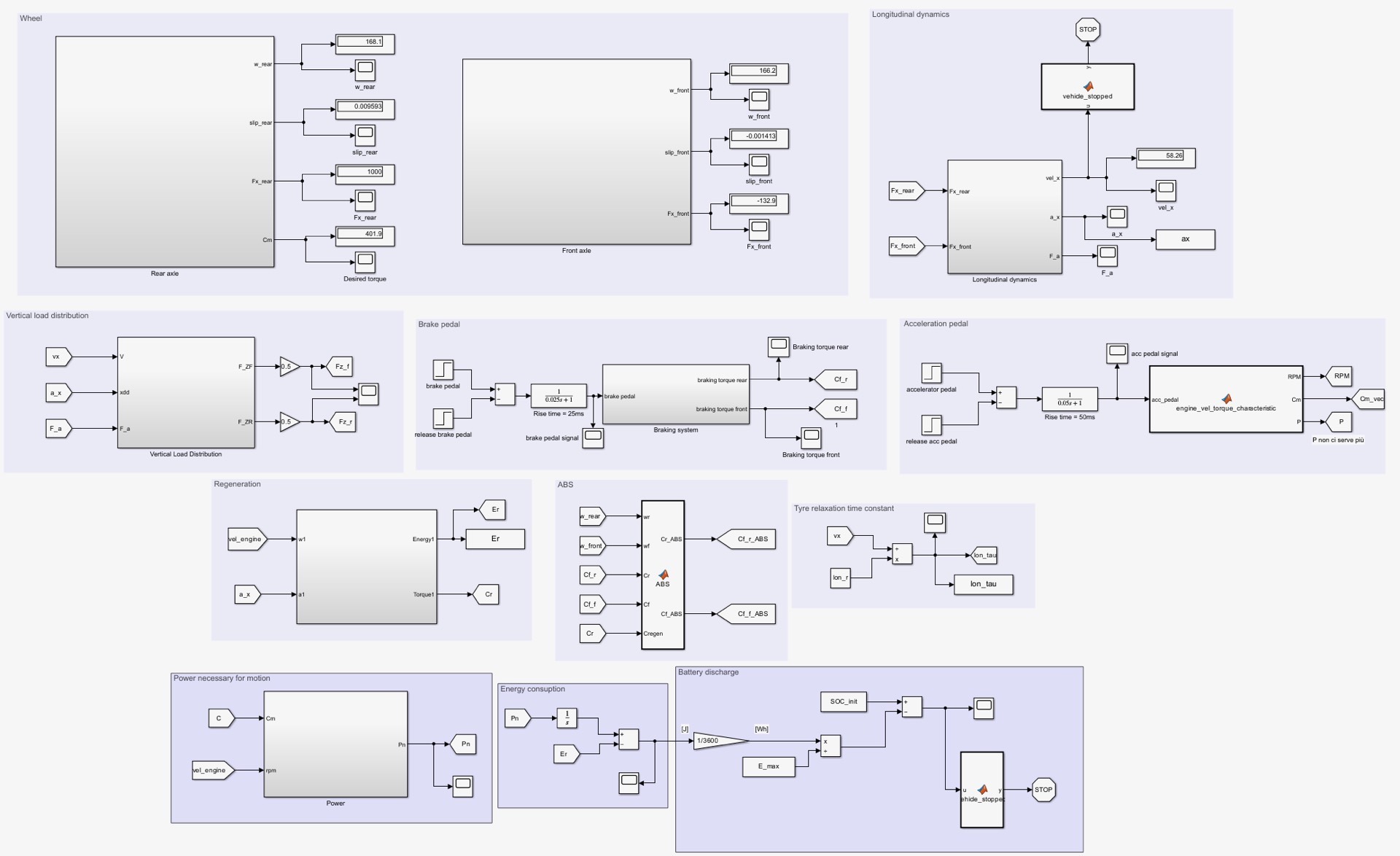
通过使用Matlab和Simulink工具,我们搭建了一个精确的电动汽车模型。该模型涵盖了车辆的纵向动力学特性,包括电机、传动、轮胎与地面之间的相互作用等。在模型中,我们进行了多项测试,以评估车辆的行驶性能,如加速、制动和巡航等。所有测试均详细记录在相应的报告中。
通过这些测试数据,我们可以得出车辆的动力学性能指标,为电动乘用车的优化设计提供重要依据。同时,这也为后续的仿真研究提供了坚实的理论基础。
二、项目2:基于线性状态反馈控制的车辆单轨模型车道保持和路径跟踪控制
在车辆自动驾驶和智能交通中,车道保持和路径跟踪控制是关键技术之一。为了实现这一目标,我们使用Matlab和Simulink工具,实现了一个车辆的单轨模型。
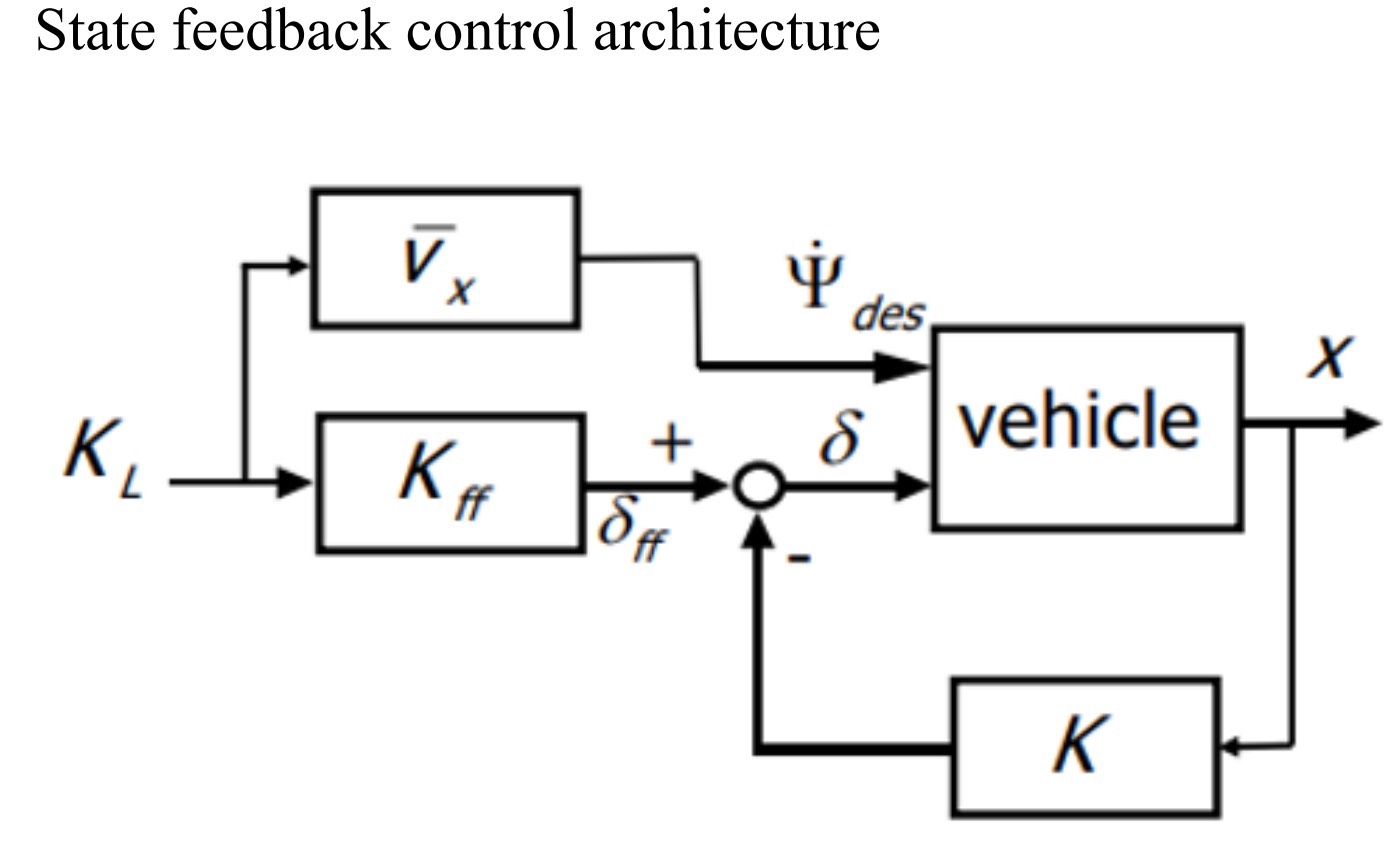
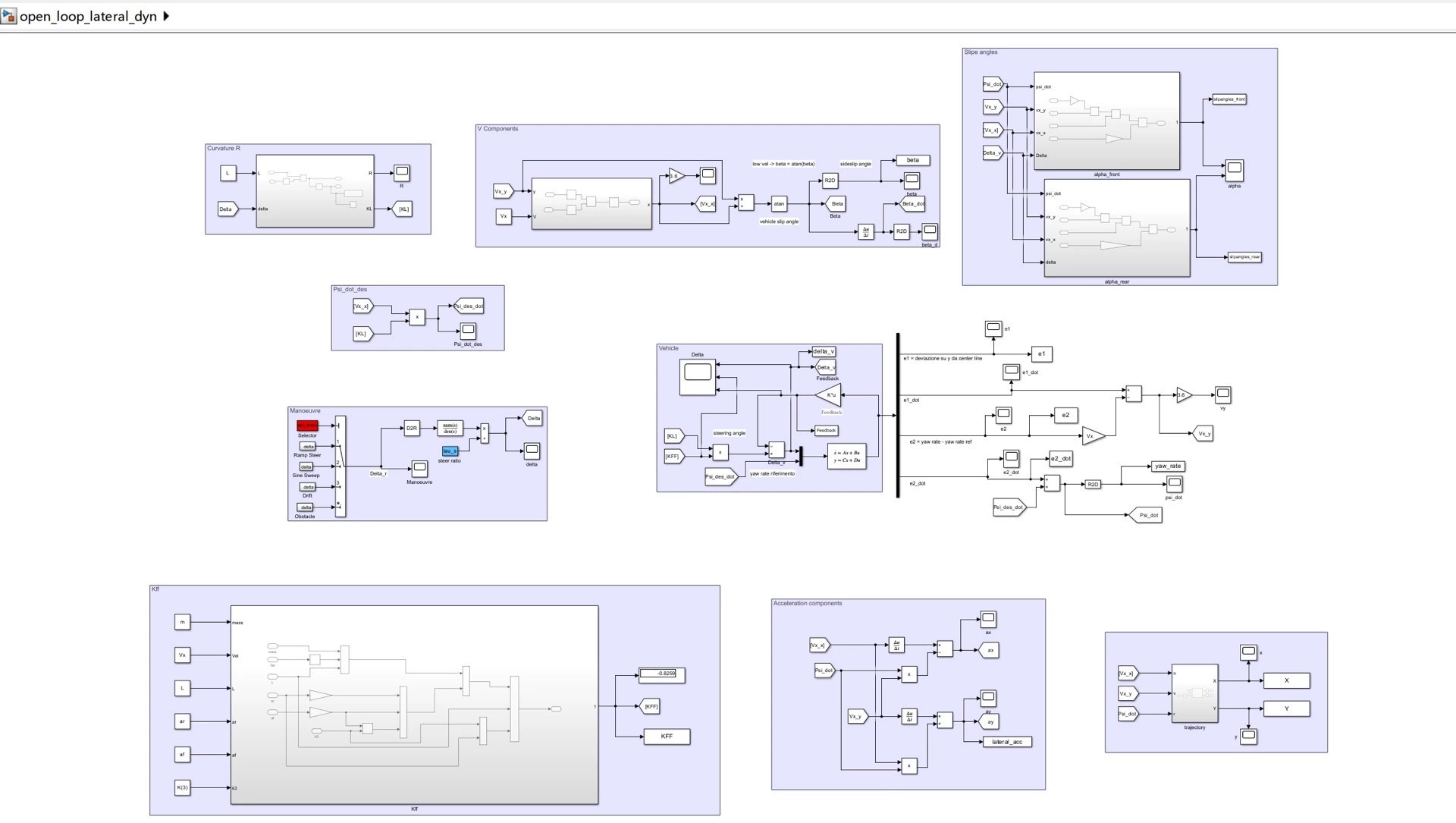
该单轨模型适用于车道保持和路径跟踪控制,能够模拟车辆在不同道路条件下的行驶行为。我们利用线性状态空间公式对车辆进行建模,描述了车辆的动态行为。此外,我们还设计了一个线性状态反馈控制器,包括前馈贡献,以稳定车辆动力学并确保其保持在车道中心线。
通过仿真实验,我们研究了车辆沿不同曲率剖面的行为,包括转弯、变道等。实验结果表明,我们的控制策略能够有效地实现车道保持和路径跟踪,为自动驾驶汽车的研发提供了重要的技术支持。
三、结论
通过以上两个项目的研究,我们建立了精确的车辆动力学仿真模型,并实现了有效的车道保持和路径跟踪控制。这不仅为电动汽车的优化设计和自动驾驶汽车的研发提供了重要依据,还为智能交通的发展奠定了坚实基础。未来,我们将继续深入研究车辆动力学及其控制策略,为汽车工业的发展做出更大的贡献。
388-车辆动力学仿真模型及车道保持和路径跟踪控制
包括:
项目1:基于纵向动力学的后轮驱动电动乘用车模型
项目2:基于线性状态反馈控制的车辆单轨模型车道保持和路径跟踪控制
简介:
第1个项目旨在描述后轮驱动电动乘用车的纵向动力学:使用 Matlab 和 Simulink(用于仿真),搭建了一个电动汽车模型,对其进行了多项测试,这些测试在相应的报告中进行了描述和记录。
第2个项目使用 Matlab 和 Simulink(用于仿真),实现了一个车辆的单轨模型,适用于车道保持和路径跟踪控制,并且我们讨论了车辆沿不同曲率剖面的行为。
该通过线性状态空间公式进行建模,此外,线性状态反馈控制器(包括前馈贡献)旨在稳定车辆动力学并确保其保持车道并准确遵循所需路径。
在相应的报告中,讨论了各种手术条件的结果分析。
注:代码为matlab脚本,附带相对应论文,




















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









