







影响GPS定位精度的基本概念
影响GPS定位精度主要有两个核心概念,分别是几何精度因子和RMS测距误差。下面分别介绍与这两个核心概念有关的概念以及公式。
1. 卫星可见性
GPS使用基于在轨卫星的到达时刻(time-of-arrival, TOA)测距概念来确定用户位置。一个GPS接收机实现正常的功能需要至少四颗无中断的GPS信号。但是,GPS信号会被地球上的各种物体所遮挡,例如森林、建筑物、海平面等等。在许多情况下,这种信号阴影将是暂时的,因此不会严重妨碍定位。然而,在摩天大楼林立的市中心街道上(见图1),GPS卫星的能见度往往在很长一段时间内受到限制,或者在整个观测活动中根本无法观测到。这种所谓的“信号中断情况”也可能发生在冠层面积密集的林业应用中。在沿海和陆水航行中,大地形、大跨度桥梁和船舶本身的高层结构也会根据GPS天线的位置发现短暂信号遮挡。在高倾斜角度下,通过飞机机身和机翼的信号阴影也可能发生在机载应用中。
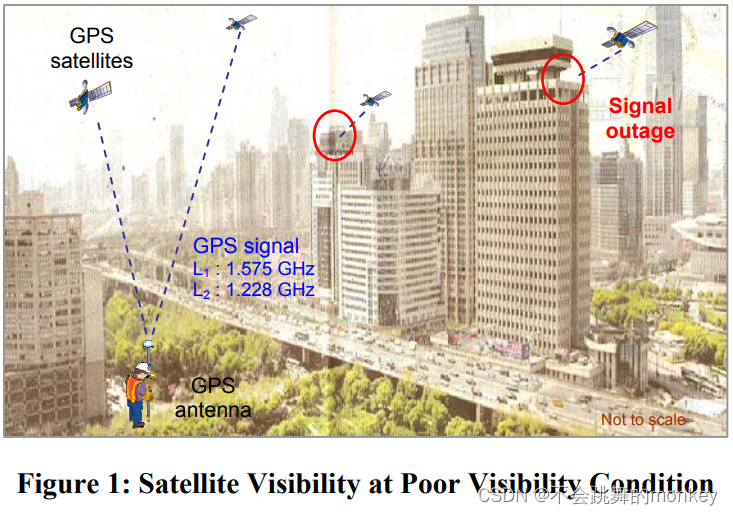
图1:可见性差时的卫星可见性[1]
todo
- 卫星可见性的计算公式
2. 卫星接收器几何形状
卫星接收机的几何形状(Satellite-recevier geometry)是获得定位高质量结果的另一个重要因素,特别是在点定位和运动测量(Januszewski, 1999)。由于在轨卫星的相对运动,卫星接收机的几何形状随时间变化。不同的卫星接收机几何形状可以放大或减小GPS推导位置的误差。然后,定位精度可以估计为测距精度乘以仅取决于卫星接收器几何形状的稀释因子。在一致、不相关、零均值、距离误差统计的假设下,这可以表示为(Parkinson, 1994(a,b)):
RMS postion error = (Geometric dilution) . (RMS ranging error) (1)
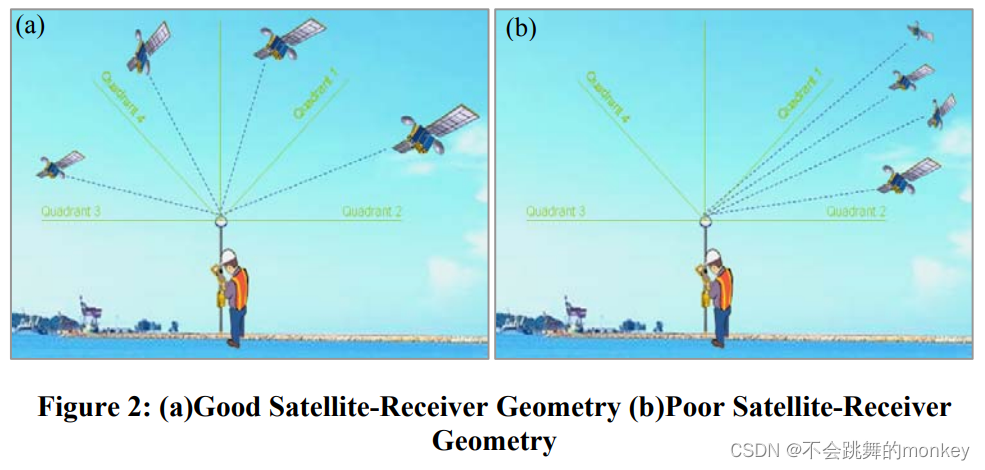
由于必须至少可见四颗卫星才能给位置进行定位,但四颗卫星有些时候并不能提供充分的定位信息。当同时观测到的卫星处于接收机观测的同一个象限时,理论上几何精度因子会增加,因此定位精度会有所下降。当可观测卫星处于不同的象限时,理论上的几何精度因子会比较小。图2说明了两种不同的情况。
卫星接收机的几何形状通常使用一个单一的无量纲数,即精度稀释(dilution of precision,DOP)来测量。为了表征GPS各分量的精度,通常将DOP分为若干项。其中包括
- 垂直DOP (vertical DOP,VDOP)
- 水平DOP (horizontal DOP,HDOP)
- 位置DOP (position DOPP,DOP)
- 时间DOP (time DOP,TDOP)。
最常用的参数称为几何精度因子 (Geometry DOP, GDOP)。它通常基于用户等效范围误差(user-equivalent range error, UERE)来定义。UERE是卫星在用户位置的伪距误差的标准偏差。伪距误差一般分为六个主要原因,即卫星星历表(satellite ephemeris)、卫星时钟( satellite clock)、电离层群时延(ionospheric group delay)、对流层群时延(tropospheric group delay)、多径误差(multipath)和接收机测量误差(receiver measurement errors)(Parkinson, 1994(b))。根据Kaplan(1996)的定义,GDOP的数学表达式为:
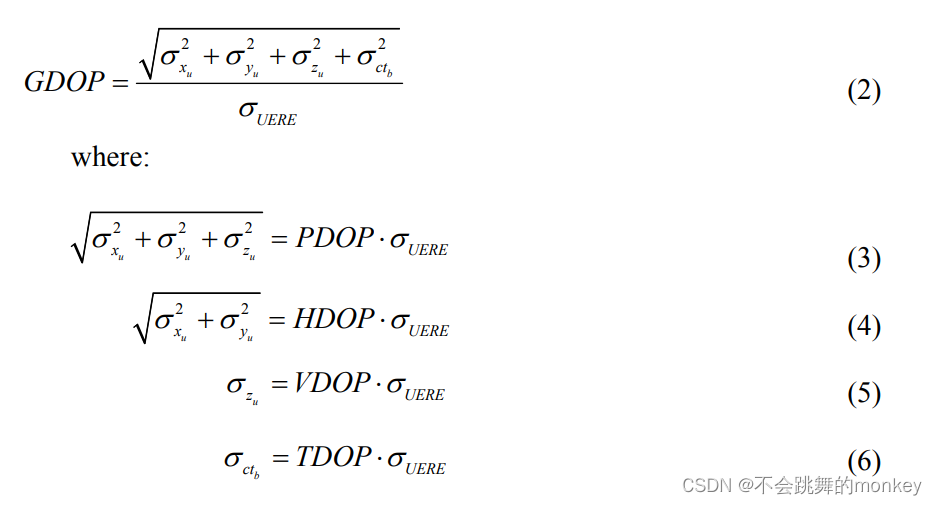
简而言之,式(2)中的平方根项包含了GPS解中误差的整体表征。每个误差由一个唯一的DOP分量表示,如式(3)至式(6)所示。DOP表示将测量误差的标准差放大到解上。仅使用卫星作为测距源,用户天线上方分布良好的卫星提供较少的DOP。通常认为DOP数越少,定位精度越高。理想情况下,DOP值为零是应用程序在任何时候都要求最高可能精度的最高可能置信水平。然而,DOP在1到3之间足以满足大多数GPS应用的高置信水平。
以上内容基本翻译自参考文献[1],文献中后面列举了关于GPS实际的例子,有兴趣的可以看一下原文。
参考文献
[1] Yahya M H, Kamarudin M N. Analysis of GPS visibility and satellite-receiver geometry over different latitudinal regions[C]//Proceedings of the International Symposium on Geoinformation (ISG 2008), Kuala Lumpur, Malaysia. 2008: 13-15.


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









