






>>直播和内容获取转到→自动驾驶之心知识星球
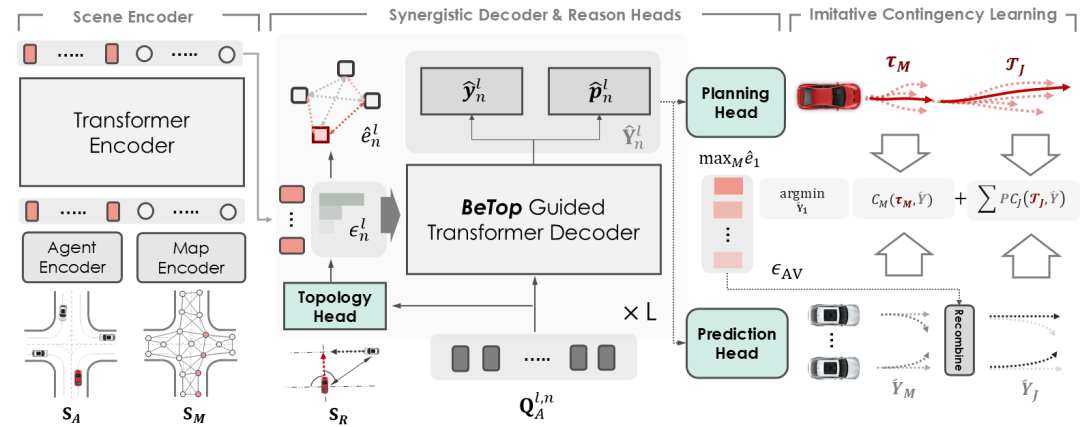
自动驾驶系统旨在通过交互主体之间的行为整合实现安全和社会一致的驾驶。然而由于多智能体场景的不确定性和异构交互,挑战仍然存在。当前的密集和稀疏行为表示在多智能体建模中面临效率低下和不一致的问题,导致在集成预测和规划(IPP)时集体行为模式的不稳定。为了解决这个问题,南洋理工大学提出了一个拓扑结构,作为一个顺从的行为前景来指导下游轨迹的生成。具体来说引入了行为拓扑(BeTop),这是一个关键的拓扑公式,明确地表示了多智能体未来之间的共识行为模式。BeTop基于编织理论,从多智能体未来轨迹中提取出兼容的交互式拓扑。BeTop监督的协同学习框架(BeTopNet)有助于在预测的拓扑先验中实现行为预测和规划的一致性。通过模仿偶然性学习,BeTop还有效地管理了预测和规划的行为不确定性。对大规模真实世界数据集(包括nuPlan和WOMD)的广泛验证表明,BeTop在预测和规划任务方面都取得了最先进的性能。对交互场景基准的进一步验证展示了交互案例中的规划合规性。
论文链接:https://arxiv.org/abs/2409.18031
开源代码:https://github.com/OpenDriveLab/BeTop
为此自动驾驶之心很荣幸邀请到南洋理工大学博士刘浩晨,为大家分享协同交互推理与轨迹生成的基础模型—BeTopNet,本次直播将围绕以下几个议题展开:
自驾任务中交互建模的背景与现状;
行为拓扑的交互建模与推理;
协同模型的构建与预测规划任务验证。

国内首个自动驾驶学习社区
『自动驾驶之心知识星球』近4000人的交流社区,已得到大多数自动驾驶公司的认可!涉及30+自动驾驶技术栈学习路线,从0到一带你入门自动驾驶感知(端到端自动驾驶、世界模型、仿真闭环、2D/3D检测、语义分割、车道线、BEV感知、Occupancy、多传感器融合、多传感器标定、目标跟踪)、自动驾驶定位建图(SLAM、高精地图、局部在线地图)、自动驾驶规划控制/轨迹预测等领域技术方案、大模型,更有行业动态和岗位发布!欢迎扫描加入

【自动驾驶之心】技术交流群
自动驾驶之心是国内领先的技术交流平台,关注自动驾驶前沿技术与行业、职场成长等。我们成立了一系列的技术交流群,涉及:语义分割、车道线检测、2D/3D目标跟踪、2D/3D目标检测、BEV感知、多模态感知、Occupancy、多传感器融合、transformer、大模型、点云处理、端到端自动驾驶、在线地图、SLAM、光流估计、深度估计、轨迹预测、高精地图、NeRF、Gaussian Splatting、规划控制、模型部署落地、自动驾驶仿真测试、产品经理、硬件配置、AI求职交流等多个方向!
备注:学校/公司+方向+昵称(快速入群方式)

点击下方卡片,关注“自动驾驶之心”公众号
ADAS巨卷干货,即可获取


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









