






编辑 | 自动驾驶专栏
点击下方卡片,关注“自动驾驶之心”公众号
戳我-> 领取自动驾驶近15个方向学习路线
本文只做学术分享,如有侵权,联系删文
论文链接:https://arxiv.org/pdf/2501.12799
代码链接:https://github.com/cxlz/Int2Planner

摘要

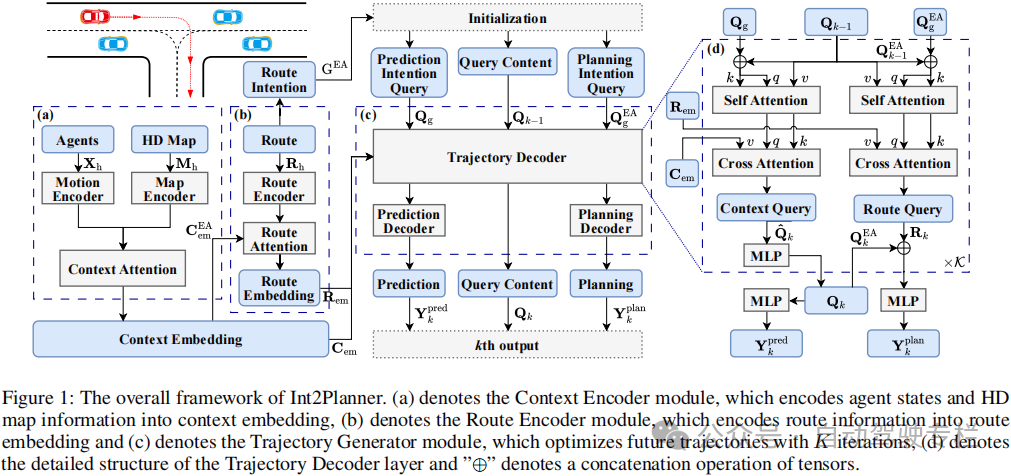
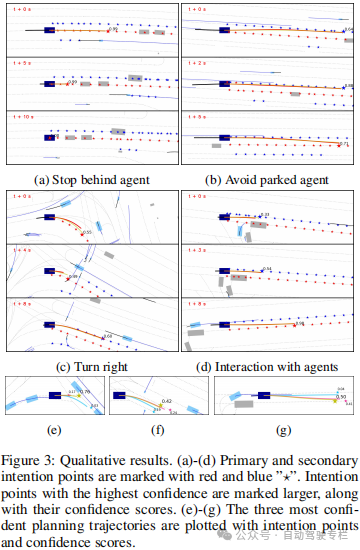
本文介绍了Int2Planner:用于集成预测和规划的基于意图的多模态运动规划器。运动规划是自动驾驶中的一个关键模块,其主要挑战是与其他参与者的交互导致的不确定性。由于大多数先前方法将预测和规划作为单独的任务,因此难以建模这些交互。此外,由于路径将自车导航到预定义的目的地,它为自车提供了相对稳定的意图,并且有助于约束不确定性。在此基础上,本文构建了基于意图的集成运动规划器Int2Planner,它实现了多模态规划和预测。Int2Planner利用了自车的路径意图点(而不是静态意图点),并且为每个意图点生成相应的规划轨迹,以促进多模态规划。在私有数据集和公开nuPlan基准上的实验证明了路径意图点的有效性,并且Int2Planner实现了最先进的性能。本文还将其部署在现实世界车辆上,并且在城市地区进行了数百公里的自动驾驶测试。这进一步验证了Int2Planner能够与交通环境持续交互。

主要贡献

本文的主要贡献总结如下:
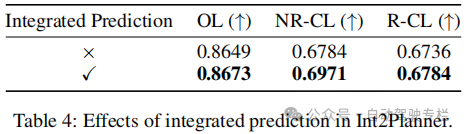
1)本文开发了一种新的规划模型Int2Planner,它利用路径意图点来处理多模态规划的不确定性。它将预测和规划结合到一个联合模型中,以实现自车和周围智能体之间的交互;
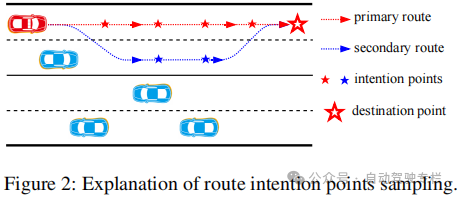
2)本文提出了从路径中采样意图点(而不是静态意图点)来表示自车的潜在意图。本文为每个意图点生成规划轨迹,以实现多模态规划;
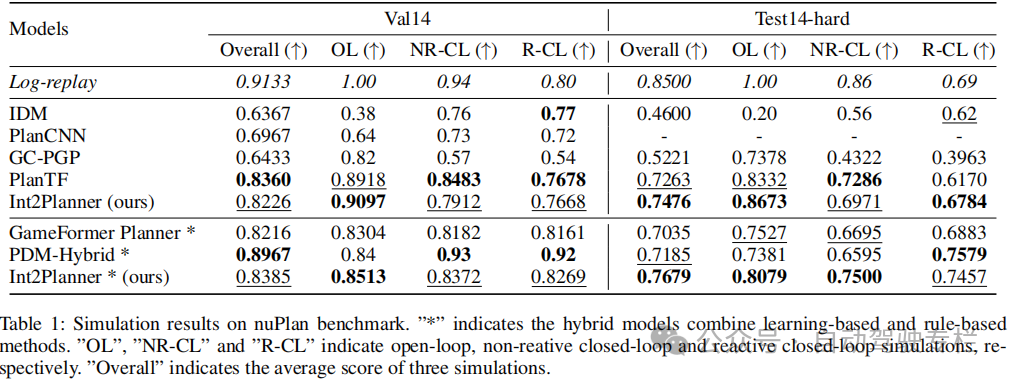
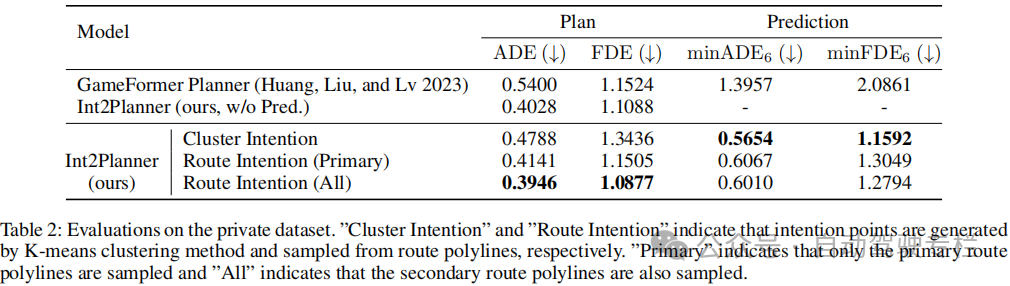
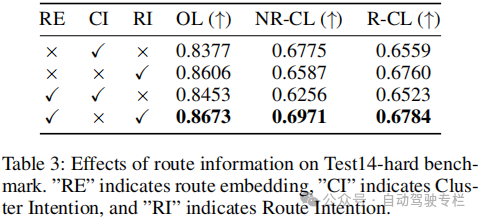
3)本文将为运动规划任务发布一个新的数据集,并且在私有数据集和公开nuPlan数据集上进行实验。结果表明,所提出的路径意图点有效地提高了运动规划能力,并且Int2Planner在这些数据集上实现了最先进的规划性能;
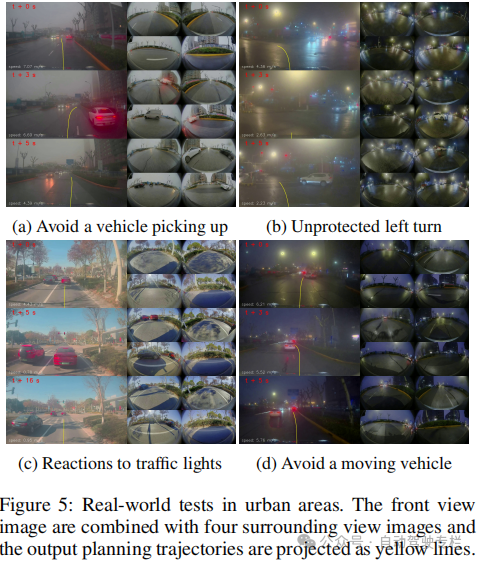
4)本文在现实世界车辆上部署了Int2Planner,测试结果表明,Int2Planner能够对复杂交通场景做出反应,并且生成安全且合理的规划轨迹。

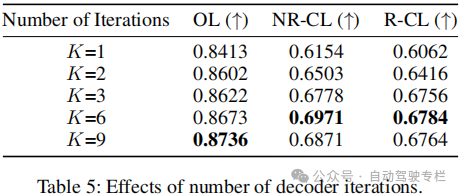
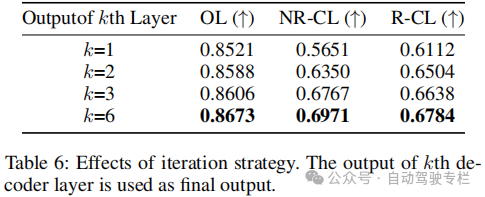
论文图片和表格


总结

本文提出了Int2Planner,这是一种基于意图的运动规划器,用于实现集成预测和规划。本文通过路径意图点来约束自身智能体(EA)的不确定性,并且根据路径意图点来生成和优化多模态规划轨迹。实验结果表明,本文模型实现了最先进的性能。路径意图点有效地提高了规划性能,并且为EA提供了合理的意图。此外,在现实世界车辆上部署了Int2Planner,测试表明,Int2Planner能够与环境持续交互,并且输出合理且安全的规划轨迹。
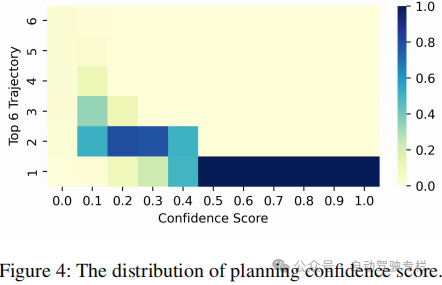
局限性和未来工作:在闭环仿真和实车测试中,目前利用了具有最高置信度的输出规划轨迹,但是该轨迹不一定是最优的,特别是在复杂的交通场景中。在未来工作中,将着重于处理多模态规划,以进一步提升性能。
① 2025中国国际新能源技术展会
自动驾驶之心联合主办中国国际新能源汽车技术、零部件及服务展会。展会将于2025年2月21日至24日在北京新国展二期举行,展览面积达到2万平方米,预计吸引来自世界各地的400多家参展商和2万名专业观众。作为新能源汽车领域的专业展,它将全面展示新能源汽车行业的最新成果和发展趋势,同期围绕个各关键板块举办论坛,欢迎报名参加。

② 国内首个自动驾驶学习社区
『自动驾驶之心知识星球』近4000人的交流社区,已得到大多数自动驾驶公司的认可!涉及30+自动驾驶技术栈学习路线,从0到一带你入门自动驾驶感知(端到端自动驾驶、世界模型、仿真闭环、2D/3D检测、语义分割、车道线、BEV感知、Occupancy、多传感器融合、多传感器标定、目标跟踪)、自动驾驶定位建图(SLAM、高精地图、局部在线地图)、自动驾驶规划控制/轨迹预测等领域技术方案、大模型,更有行业动态和岗位发布!欢迎扫描加入

③全网独家视频课程
端到端自动驾驶、仿真测试、自动驾驶C++、BEV感知、BEV模型部署、BEV目标跟踪、毫米波雷达视觉融合、多传感器标定、多传感器融合、多模态3D目标检测、车道线检测、轨迹预测、在线高精地图、世界模型、点云3D目标检测、目标跟踪、Occupancy、CUDA与TensorRT模型部署、大模型与自动驾驶、NeRF、语义分割、自动驾驶仿真、传感器部署、决策规划、轨迹预测等多个方向学习视频(扫码即可学习)

④【自动驾驶之心】全平台矩阵



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









