






重磅!预售来啦。面向科研&教学级自动驾驶全栈小车黑武士系列001正式开售了。世界太枯燥了,和我们一起做点有意思的事情吧。原价34999元,现在支付定金1000元抵扣2000,由于订单已经启动,优先锁定的安排组装发货。
1)黑武士001
自动驾驶之心团队推出的教研一体轻量级解决方案,支持感知、定位、融合、导航、规划等多个功能平台,阿克曼底盘。
支持二次开发+二次改装!!!快速适配其它需求。
本科生学习进阶+比赛;√
研究生科研+发论文;√
研究生找工作+项目;√
高校实验室教具;√
培训公司/职业院校教具;√

2)效果展示
我们测试了室内、室外、地库等场景下感知、定位、融合、导航规划等功能;
unsetunset整体功能介绍unsetunset
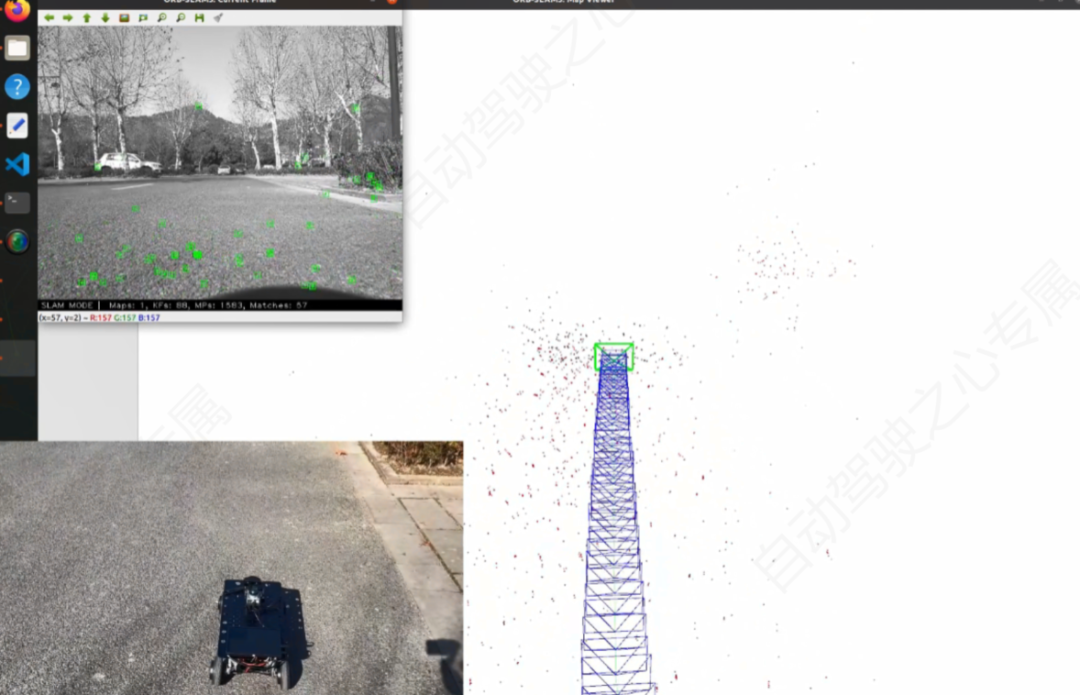
unsetunset户外公园行驶unsetunset
unsetunset点云3D目标检测unsetunset
unsetunset室内地库2D激光建图unsetunset
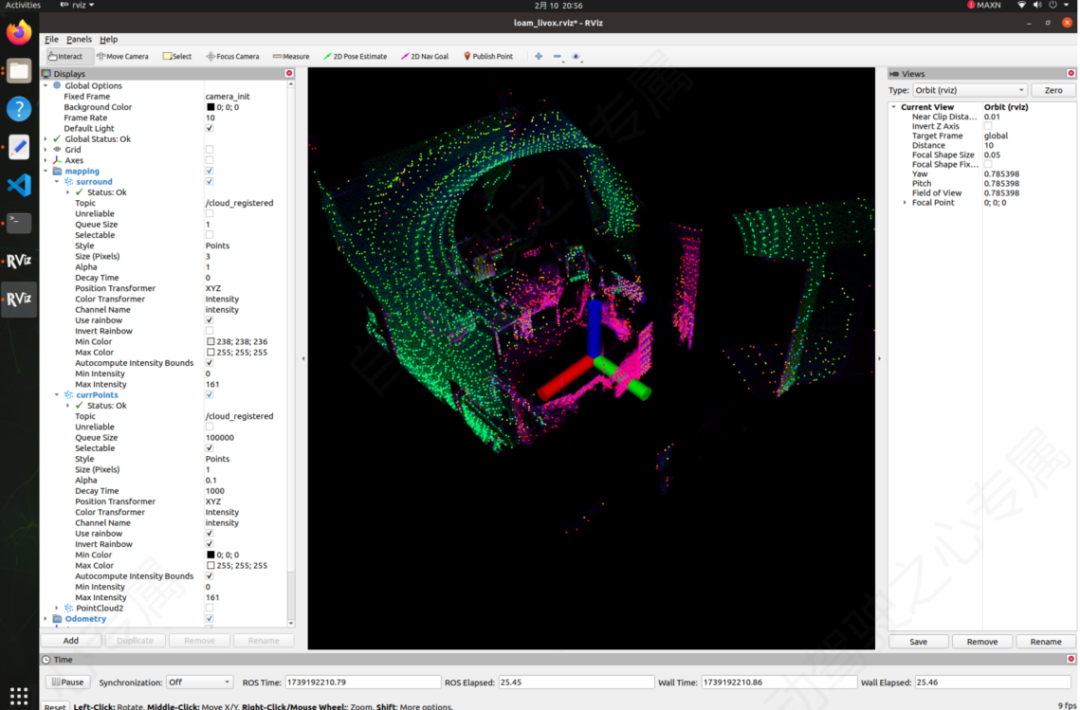
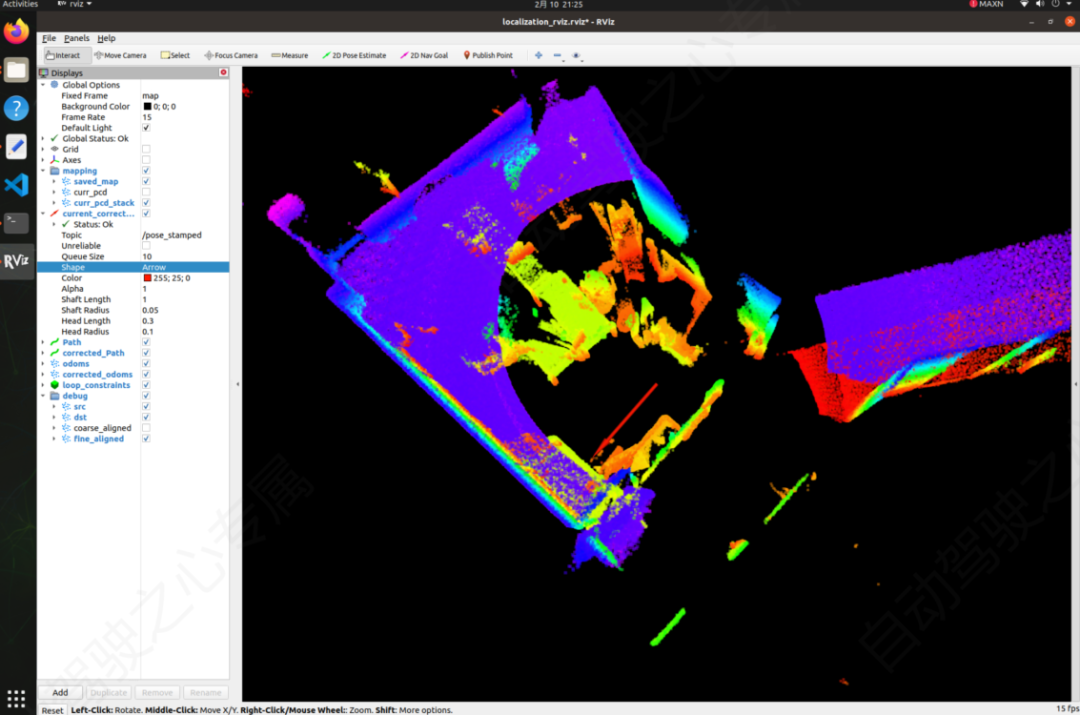
unsetunset室内地库3D激光建图unsetunset
unsetunset上下坡测试unsetunset
unsetunset室外大场景3D建图unsetunset
unsetunset室外夜间行驶unsetunset
3)硬件说明
主要传感器 | 传感器说明 |
|---|---|
3D激光雷达 | Mid 360 |
2D激光雷达 | 镭神智能 |
深度相机 | 奥比中光,自带IMU |
主控芯片 | Nvidia Orin NX 16G |
显示器 | 1080p显示器 |
底盘系统 | 阿克曼底盘 |
结构系统 | 钣金件,硬铝+发黑处理 |

4)参数说明
主要参数 | 参数说明 |
|---|---|
自车重量 | 30kg |
结构部分 | 铝合金/不锈钢 钣金+cnc加工 |
电池功率 | 50w |
供电电压 | 24V |
续航时间 | >4h |
电机说明 | 轮毂伺服电机 |
轮毂说明 | 轮毂外径130mm |
运动速度 | 1.5m/s(最大可到2m/s) |
载荷说明 | 30kg |
车体尺寸 | 620 x 400 x 320(长宽高,mm) |
5)功能说明
2D目标检测(语义SLAM)
2D目标分割(语义SLAM)
人体位姿估计(语义SLAM)
深度估计与测量
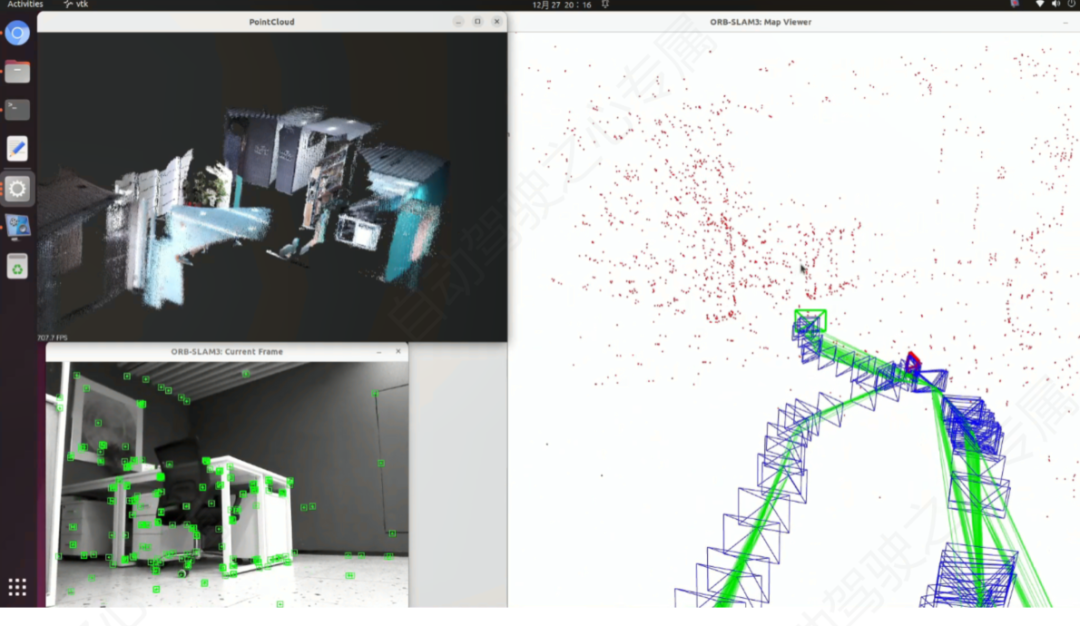
RGB-SLAM
视觉惯性SLAM
2D激光SLAM
3D激光SLAM
激光视觉融合SLAM
视觉惯性融合SLAM
激光惯性融合SLAM
点云处理与感知
车辆导航
车辆避障
......
6)软件说明
软件与语言框架:ROS、C++、python
支持一键启动,提供开发环境
7)产品说明书一览
以下为产品说明书部分内容,涉及硬件、传感器参数、软件、维修等内容。

unsetunset硬件配置说明unsetunset


unsetunset软件说明unsetunset

unsetunset一键启动说明unsetunset

unsetunset功能启动说明unsetunset
unsetunset遥控模式unsetunset
unsetunset代码说明unsetunset

unsetunset效果一览unsetunset
8)售后与维修说明
1年内支持售后(非人为损坏),邮费自付。保修期内因操作失误/修改代码等个人原因导致损坏的,我司提供免费维修。采购硬件欢迎添加微信oooops-life做进一步咨询。



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









