







一、OpenMax简介(缩写为:OMX)
二、OpenMax在Android中的位置

三、OpenMax的主要概念
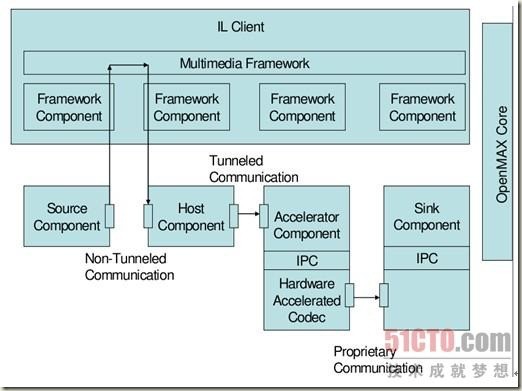
- 客户端(Client):访问IL core或IL component的软件层,可能是位于GUI应用程序的下层,如GStreamer。IL client是一个典型的功能块,如filter graph multimedia framework, OpenMAX AL, 或application都可以调用它。IL client与OpenMAX IL core进行交互,利用IL core加载和卸载组件、在组件间建立直接通信以及获得组件方法的入口。
- core:相关平台的代码,具有将IL component载入主存储器的功能,当应用程序不再需要某组件时,IL core将负责把该组件从存储器卸去。一般来说,组件一旦载入存储器,IL core将不在参与应用程序与组件之间的通信。
- 端口(Port):组件的输入输出接口
- 组件(Component):OpenMax IL的单元,每一个组件实现一种功能。组件按照端口可分类为Source(只有一个输出端口)、Sink(只有一个输入端口)和Host组件(一个输入端口和一个输出端口),此外有一个Accelerator组件,它具有一个输入端口,调用了硬件的编解码器,加速主要体现在这个环节上。
- 隧道化(Tunneled):让两个组件直接连接的方式。通过隧道化可以将不同的组件的一个输入端口和一个输出端口连接到一起,在这种情况下,两个组件的处理过程合并,共同处理。尤其对于单输入和单输出的组件,两个组件将作为类似一个使用。
四、OpenMax的工作方式
五、OpenMax的测试方式
六、OpenMax接口和集成过程(以android平台的为例)

七、android中支持的组件和Role
| 组件 | 角色 | 动态库名 |
| OMX.PV.mpeg4dec | video_decoder.mpeg4 | libomx_m4vdec_sharedlibrary |
| OMX.PV.h263dec | video_decoder.h263 | libomx_m4vdec_sharedlibrary |
| OMX.PV.avcdec | video_decoder.avc | libomx_avcdec_sharedlibrary |
| OMX.PV.wmvdec | video_decoder.wmv | libomx_wmvdec_sharedlibrary |
| OMX.PV.rvdec | video_decoder.rv | libomx_rvdec_sharedlibrary |
| OMX.PV.aacdec | audio_decoder.aac | libomx_aacdec_sharedlibrary |
| OMX.PV.amrdec | audio_decoder.amr
audio_decoder.amrnb
audio_decoder.amrwb
| libomx_amrdec_sharedlibrary |
| OMX.PV.mp3dec | audio_decoder.mp3 | libomx_mp3dec_sharedlibrary |
| OMX.PV.wmadec | audio_decoder.wma | libomx_wmadec_sharedlibrary |
| OMX.PV.radec | audio_decoder.ra | libomx_radec_sharedlibrary |
| OMX.PV.amrencnb | audio_encoder.amrnb | libomx_amrenc_sharedlibrary |
| OMX.PV.mpeg4enc | video_encoder.mpeg4 | libomx_m4venc_sharedlibrary |
| OMX.PV.h263enc | video_encoder.h263 | libomx_m4venc_sharedlibrary |
| OMX.PV.avcenc | video_encoder.avc | libomx_avcenc_sharedlibrary |
| OMX.PV.aacenc | audio_encoder.aac | libomx_aacenc_sharedlibrary |
八、Openmax 一些函数的简单介绍
1 OMX core methods 1)OMX_Init
2)OMX_Deinit
3)OMX_GetHandle
4)OMX_FreeHandle
5)OMX_ComponentNameEnum
6)OMX_GetComponentsOfRole
7)OMX_GetRolesOfComponent
8)OMX_SetupTunnel
9)OMX_GetContentPipe
2 The configuration parser API
除了以上methods,强烈推荐OMX核心插件库包含此API
2.1函数原型
OMX_BOOL OMXConfigParser ( OMX_PTR aInputParameters,OMX_PTR aOutputParameters);
2.2 传递参数
aInputParameters 指向如下结构
typedef struct
{
OMX_U8* inPtr; //codec 配置头部指针
OMX_U32 inBytes; //codec 配置头部长度
OMX_STRING cComponentRole; //OMX codec类型 eg "video_decoder.mpeg4"
OMX_STRING cComponentName; //OMX 组件名称
} OMXConfigParserInputs;
2.3 返回值
OMX_FALSE : 处理codec配置头部错误或不支持该格式
OMX_TURE : 正确处理codec配置头部
2.4 函数作用
填充aOutputParameters,有两种选择:audio coded or vedio codec
for audio
typedef struct
{
OMX_U16 Channels; //通道:单声道、立体声、5.1
OMX_U16 BitsPerSample; //位宽(eg16)
OMX_U32 SamplesPerSec; //采样率
} AudioOMXConfigParserOutputs;
typedef struct
{
OMX_U32 width; //检测到的视频剪辑宽度
OMX_U32 height; //检测到的视频剪辑高度
OMX_U32 profile; //参数
OMX_U32 level; //级别?
} VideoOMXConfigParserOutputs;
3 动态加载OMX内核
解释了\system\system\etc\pvplayer.cfg文件中最后一行的含义
(0xa054369c,0x22c5,0x412e,0x19,0x17,0x87,0x4c,0x1a,0x19,0xd4,0x5f),"libomx_sharedlibrary.so"
作用:将OMX内核动态加载进OpenCORE框架
位置:\system\system\etc\pvplayer.cfg
形式:(OMX Core API OsclUuid), “shared library name.so”
eg:(0xa054369c,0x22c5,0x412e,0x19,0x17,0x87,0x4c,0x1a,0x19,0xd4,0x5f),"libomx_core_vendorXYZ.so"
注意:(0xa054369c,0x22c5,0x412e,0x19,0x17,0x87,0x4c,0x1a,0x19,0xd4,0x5f) 提供独立API ID,不可修改
数据格式及OMX输入缓冲细节
1.1 帧起始代码
一般不用,H.264可能使用。
1.2 OMX缓冲区
三个值得信赖的关键参数
nFilledLen 缓冲区长度
nTimestamp 缓冲区时间戳
OMX_BUFFERLAG_ENDOFFRAME 缓冲区结束标志位
1.3多帧合并输入缓冲
一些音频信息,单帧过小(eg ARM),将其合并作为一个缓冲区处理。
nFilledLen为所有帧总长度,nTimestamp指向缓冲区第一帧时间。
1.4部分帧
视频解码单帧过大情况下,可能将单帧拆分后传递给缓冲区。
部分帧情况下,只有最后一帧的缓冲区才拥有OMX_BUFFERLAG_ENDOFFRAME。
部分帧缓冲区不会包含两帧信息。
流媒体可能包含多帧。
部分帧的nTimestamp应当相同。
总结:OMX输出缓冲区可能包含
——完整多帧
——完整单帧
——部分帧
1.5 错误的数据封装
多帧的部分帧封装 eg wrong(Frame1+Frame2 part)
1.6 Codec配置数据
Codec配置缓冲区使用OMX_BUFFERLAG_ENDOFFRAME 和OMX_BUFFERFLAG_CODECCONFIG标志位。
H.264的SPS和PPS使用独立的OMX输入缓冲区。
2 H264/AVC 解码器格式
Codec配置头部:
SPS和PPS NAL单元位于起始的OMX输入缓冲区。
SPS和PPS NALs使用独立的OMX输入缓冲区,并使用OMX_BUFFERLAG_ENDOFFRAME 和OMX_BUFFERFLAG_CODECCONFIG标记。
2.1 AVC NAL模式与AVC Frame模式
通过设置iOMXComponentUsesFullAVCFrame标志位,可以决定AVC数据使用哪种模式解码。
默认使用NAL模式,此种模式下OpenCORE框架同时提供完整单帧和部分帧输入缓冲区。
在Frame模式下,OpenCORE框架积累NALs并提供完整单帧给输入缓冲区。
OMX_OTHER_EXTRADATA结构体用来区分NAL边界。
如果iOMXComponentUsesFullAVCFrame和iOMXComponentUsesNALStratCodes都被置为OMX_TRUE,
NAL边界可被start codes区分,此时OMX_OTHER_EXTRADATA无用。
数据结构——NAL模式:
输入缓冲区包含一个或多个NAL,但只包含同一帧的NAL,一帧最后一个NAL才含有OMX_BUFFERLAG_ENDOFFRAME标志位。
数据结构——Frame模式:
每个输入缓冲区包含完整帧。
如果使用NAL start codes,可通过读取NAL start codes区分NAL边界。
否则使用OMX_OTHER_EXTRADATA结构体区分NAL边界。
在Frame模式中,每个缓冲区都含有OMX_BUFFERLAG_ENDOFFRAME标志位。
在Frame模式中,每个缓冲区都含有位于OMX_BUFFERLAGHEADERTYPE结构体nFlags区域的OMX_BUFFERLAG_EXTRADATA标志位。
缓冲区最后包含AVC frame,追加以下数据:
OMX_OTHER_EXTRADATATYPE extra;
OMX_OTHER_EXTRADATATYPE terminator;
extra.eType = OMX_ExtraDataNALSizeArray;
extra.nSize = 20+4*(number of NALs in the frame); // 20 is the size of
OMX_OTHER_EXTRADATATYPE structure + 4 bytes per NAL size
extra.nDataSize = 4 * (number of NALs in the frame)
extra.data[4*i] = size of the i-th NAL (data is declared as byte array – so offset is 4*i, since 4 bytes
is assigned to signal the size of each NAL unit)
terminator.eType = OMX_ExtraDataNone;
terminator.nSize = 20;
terminator.nDataSize = 0;
#define OMX_ExtraDataNALSizeArray 0x7F123321
通过获取OMX_OTHER_EXTRADATA结构体信息,可以得知每一帧包含NAL单元的数目并确定NAL边界。
一个例子:AVC Frame模式,包含2个NAL,包含extra数据结构
总结:
1)每个缓冲区都含有位于OMX_BUFFERLAGHEADERTYPE结构体nFlags区域的OMX_BUFFERLAG_EXTRADATA标志位
2)每个NAL的长度应当使用独立的4byte无符号整型数表示(eg OMX_U32)
3)所有NAL的长度被编码成OMX_U32的数组存放在buffer最后。
4)包含完整帧的缓冲区必须含有位于OMX_BUFFERLAGHEADERTYPE结构体nFlags区域的OMX_BUFFERLAG_ENDOFFRAME标志位。
5)一个独立的缓冲区不包含多帧数据。
3 YUV和RGB数据格式
OMX编码组件中,生肉提供YUV或者RGB格式,OpenCORE框架将提供一帧完成的YUR或RGB数据给OMX组件。
OpenMax 调用顺序(OpenMax Call Sequences)
1 OMX 核心初始化 _OMX_MasterInit
1)调用OMX_Init函数
->OsclInit::Init(error, &select); //init all Oscl layers except Oscl scheduler.
->_Try_OMX_Create(error, data); //create the OMX singleton
->OsclSingletonRegistry::registerInstanceAndUnlock(data, OSCL_SINGLETON_ID_OMX, error); //Release the singleton.
->_Try_OMX_Init(error, status); //If create succeeded, then init the OMX globals.
2)PV框架列举所有OMX
OMX_ComponentNameEnum //列举所有组件的名称
->OsclSingletonRegistry::getInstance(OSCL_SINGLETON_ID_OMX, error);
->oscl_strncpy(cComponentName, (data->ipRegTemplateList[Index])->ComponentName, nNameLength);
OMX_GetRolesOfComponent // 通过组件名称找到组件,返回其角色(role)
->OsclSingletonRegistry::getInstance(OSCL_SINGLETON_ID_OMX, error);
->data->ipRegTemplateList[ii])->GetRolesOfComponent(RoleString)
->oscl_strncpy((OMX_STRING) roles[ii], (OMX_STRING)RoleString[ii], oscl_strlen((OMX_STRING)RoleString[ii]) + 1);
2 OMX组件实例、功能及端口
OMX核心初始化后,下一步为列举每个组件的功能和端口。
1)调用OMX_GetHandle获取所需的OMX组件信息。
2)调用OMX_GetParameter及“PV_OMX_CAPABILITY_TYPE_INDEX”这个index去获取组件的功能。
万一组件不是OpenMax全兼容或者OpenMax的特性不明确,以上获取的功能决定了OMX是否支持输入/输出端口“UseBufeer”和“AllocateBuffer”调用,以及OMX是否支持部分帧等等。
注意:如果OMX组件返回“OMX_ErrorUnsupportedIndex”给index(或其他比如“OMX_ErrorNone”),PV框架将为组件功能赋默认值。
3)调用OMX_GetParameter,针对视频组件再调用“OMX_IndexVideoInit”,针对音频组件则调用“OMX_IndexAudioIni”以获取可用的端口号。
4)循环查找可用的端口号以找到输入端口。
5)循环查找可用的端口号以找到输出端口。
注意:
Index “PV_OMX_CAPABILITY_TYPE_INDEX” is defined as:
#define PV_OMX_COMPONENT_CAPABILITY_TYPE_INDEX 0xFF7A347
The OMX_GetParameter call expects the following structure to be filled for this index:
typedef struct PV_OMXComponentCapabilityFlagsType
{
// OMX COMPONENT CAPABILITY RELATED MEMBERS
OMX_BOOL iIsOMXComponentMultiThreaded;
OMX_BOOL iOMXComponentSupportsExternalOutputBufferAlloc;
OMX_BOOL iOMXComponentSupportsExternalInputBufferAlloc;
OMX_BOOL iOMXComponentSupportsMovableInputBuffers;
OMX_BOOL iOMXComponentSupportsPartialFrames;
OMX_BOOL iOMXComponentUsesNALStartCode;
OMX_BOOL iOMXComponentCanHandleIncompleteFrames;
OMX_BOOL iOMXComponentUsesFullAVCFrames;
} PV_OMXComponentCapabilityFlagsType;
功能参数的默认值:
1)iIsOMXComponentMultiThreaded ——默认值OMX_TRUE。
OMX组件一般运行与独立的线程(与PV框架线程不同),有可能将OMX组件集成进PV框架线程(e.g.,通过同步调用)。
2)iOMXComponentSupportsExternalOutputBufferAlloc ——默认值OMX_TRUE。
OMX规范要求OMX组件支持外部分配输出缓冲(就是输出缓冲的OMX_UseBuffer调用)。
如果组件不支持,必须通知PV框架,以便其调用“OMX_AllocateBuffer”代替。
3)iOMXComponentSupportsExternalInputBufferAlloc ——默认值OMX_TRUE。
OMX规范要求OMX组件支持外部分配输入缓冲(就是输入缓冲的OMX_UseBuffer调用)。
如果组件不支持,必须通知PV框架,以便其调用“OMX_AllocateBuffer”代替。
4)iOMXComponentSupportsMovableInputBuffers ——默认值OMX_TRUE。
如果OMX缓冲是外部分配的,为了提高稳定性和优化性能,可以分离OMX缓冲头部信息(OMX_BUFFERHEADERTYPE)与数据区(“pBuffer”)。换句话说,使OMX缓冲更有“移动性”,当传递一个输入缓冲到OMX组件时,“pBuffer”区域和头部信息不一定指向相同的缓冲区。因此,可以分配更多的数据缓冲在框架中循环工作,只有在需要把缓冲传递到OMX组件时才附加到头部信息去。如果OMX组件要求头部和数据一直指向相同的缓冲,则iOMXComponentSupportsMovableInputBuffers应该被置为OMX_FALSE。
5)iOMXComponentSupportsPartialFrames ——默认值OMX_TRUE。
OMX规范要求OMX组件支持将任意数据打包进OMX缓冲,包括独立单帧、NAL和被拆分到多个缓冲区的解码单元。PV框架支持“OMX_BUFFERFLAG_ENDOFFRAME”标记去组装部分帧。然而,如果OMX组件不支持组装部分帧,也就是OMX组件要求PV框架来组装部分帧并提供给OMX组件完整单帧或NAL,此时iOMXComponentSupportsPartialFrames需要被设置为OMX_FALSE。
注意:设置为OMX_FALSE将影响性能。
6)iOMXComponentUsesNALStartCode ——默认值OMX_FALSE。
这个标志位将影响H264解码。PV框架提供所有信息以重建立H264 NALs(通过OMX缓冲的大小和OMX_BUFFERFLAG_ENDOFFRAME的大小)。因此没有必要由OMX组件解码输出流来获取0x0001的NAL初始代码。如果OMX的H264组件及解码单元需要NAL起始代码,可将iOMXComponentUsesNALStartCode置为OMX_TRUE。
7)iOMXComponentCanHandleIncompleteFrames ——默认值OMX_TRUE。
如果丢失部分数据流(比如数据包丢失),假定OMX组件及解码单元可以解决这个问题。如果不可以,则将iOMXComponentCanHandleIncompleteFrames 设置为OMX_FALSE。当“iOMXComponentSupportsPartialFrames”也被设置为OMX_FALSE时,这点相当重要,因为OMX组件不提供组装部分帧,也就是说PV框架必须提供组装好的frame/NALs,因此需要通知OMX组件不完整的帧数据是否可以传递进来。
8)iOMXComponentUsesFullAVCFrames ——默认值OMX_FALSE。
这个标志位决定AVC解码中使用NAL模式还是frame模式。AVC数据可由以上两种模式提供给OMX组件。默认为NAL模式(设置为OMX_FALSE),此模式下OpenCore框架可以为OMX输入缓冲同时提供完整或者部分AVC NAL。Frame模式下(OMX_TRUE),OpenCore框架积累NAL,并提供给OMX输入缓冲一帧完整的数据。
NAL边界的问起前面讨论过了,此处省略。
3 OMX组件输入输出缓冲协商
在任何数据交换前,输入输出缓冲需要进行协商。PV框架需要做以下工作:、
1)调用OMX_GetParameter获取输入端口缓冲参数(最小/实际缓冲数,缓冲区大小等等)
2)检查有效的输入缓冲参数(修改一些参数,比如帧的长度和宽度,以及缓冲区的数目等等)
3)调用OMX_SetParameter函数设置输入缓冲参数
4)调用OMX_GetParameter获取输出端口缓冲参数(最小/实际缓冲数,缓冲区大小等等)
5)检查有效的输出缓冲参数(修改一些参数,比如帧的长度和宽度,以及缓冲区的数目等等)
6)调用OMX_SetParameter函数设置输出缓冲参数
过程如图三(省略)
一些设想:
1)缓冲区尺寸的设想:
对于编码器组件,最终分配的输出缓冲区尺寸可能小于profile/level/target比特率所要求的最大帧尺寸。出于内存消耗考虑,OMX编码器组件应当能够输出frame或NAL的比特流划分到多个输出缓冲区去。老调重弹,最后一个部分缓冲区使用“OMX_BUFFERFLAG_ENDOFFRAME”标记结尾。
对于解码器组件,最终分配的输入缓冲区尺寸可能小于profile/level/target比特率所要求的最大帧尺寸。出于内存消耗考虑,PV框架在适当的时候提供采用“OMX_BUFFERFLAG_ENDOFFRAME”标记结尾的输入缓冲区。如果输入缓冲包含完整帧(H264也可能是NAL单元 )或多帧,“OMX_BUFFERFLAG_ENDOFFRAME”将会用来标记一帧的结尾。如果完整的frame/NAL不能放入一个输入缓冲区,则会被拆分放入多个缓冲区。包含部分信息的缓冲区,“OMX_BUFFERFLAG_ENDOFFRAME”标记位将会被置为0。一帧数据的最后一个缓冲区中“OMX_BUFFERFLAG_ENDOFFRAME”才会被置为1。通过这种做法,组件可以方便的重构一帧数据。
如果OMX解码器组件不兼容组长部分帧,PV框架将负责做这件事情。
2)输入/输出缓冲区数量。
框架或许希望分配比OMX要求更多的的输入/输出缓冲区以提供更优的性能(比如解码器输出缓冲或编码器输入缓冲——缓冲更多的数据可以提高性能)。尽管性能提升了,但无法送到OMX组件去(不太理解,应该还是协商不好的意思)。
4 OMX状态变换 加载->空闲
如果部分已分配的缓冲区进入空闲状态,缓冲区分配将挂起。在变化过程中,PV框架将“
1)通过“OMX_SendCommand”调用发送命令给OMX组件,将状态由OMX_StateLoaded改变为OMX_StateIdle
2)调用一系列“OMX_UseBuffer” 或者“OMX_AllocateBuffer”通知OMX组件。这些调用使用NumInputBuffer记录输入输入端口的数目,使用NumOutputBuffer记录输入输入端口的数目。
3)等待OMX组件的EventHandler事件回调,通知框架状态变换完成(OMX_EventCmdComplete)
一些设想与推荐参数:
根据OMX规范,兼容的OMX组件必须同时支持OMX_UseBuffer 和 OMX_AllocateBuffer调用。然而,出于一些内在原因,完全实现是不可能的,组件应当通知PV框架其所具有的功能。
推荐将INPUT缓冲分配在OMX组件外部,这样可以减少额外的内存拷贝(也就是说输入缓冲使用OMX_UseBuffer)。
5 变换到“执行”状态与数据交换
状态变化到执行时才开始真正处理数据。本步骤中,PV框架将:
1)通过“OMX_SendCommand”调用发送命令给OMX组件,将状态由OMX_StateIdle改变为OMX_StateExecuting。
2)等待OMX组件的EventHandler事件回调,通知框架状态变换完成(OMX_EventCmdComplete)。
3)通过OMX_EmptyThisBuffer调用将输入缓冲发送给OMX组件,通过OMX_FillThisBuffer调用将输出缓冲发送给OMX组件,组件使用合适的回调函数返回缓冲区。
过程如图5
注意:
1)在任意时刻OMX组件如果拥有所有输入缓冲区(也就是所有的输入缓冲都通过EmptyThisBuffer调用传给了OMX组件),此时将不能再传递任何输入缓冲区给OMX组件,知道OMX通过EmptyBufferDone释放一个缓冲。对于输出缓冲区同样。
2)如果PV框架没有及时将缓冲区发给OMX框架,OMX组件不会多次返回同一个缓冲区(也就是一旦OMX框架返回一个缓冲区,只有PV框架再次调用这个缓冲,OMX组件才可使用)。这是OMX缓冲交换APSs所规定的基本规则。
6 暂停
PV框架常见的功能包括暂停和恢复,PV框架将:
1)通过“OMX_SendCommand”调用发送命令给OMX组件,将状态由OMX_StateExecuting改变为OMX_StatePause。
2)等待OMX组件的EventHandler事件回调,通知框架状态变换完成(OMX_EventCmdComplete)。
PV框架向OMX组件发送暂停命令后,立刻停止发送输入输出缓冲。
有暂停就有恢复,PV框架将:
1)通过“OMX_SendCommand”调用发送命令给OMX组件,将状态由OMX_StatePause改变为OMX_StateExecuting。
2)等待OMX组件的EventHandler事件回调,通知框架状态变换完成(OMX_EventCmdComplete)。
PV框架的状态恢复到执行后,将恢复发送OMX输入输出缓冲。
过程如图6
7 端口刷新(如果可用)
端口刷新调用一般用于重新配置解码器组件,这样会清空所有数据。在此情况下,PV框架将:
1)通过“OMX_SendCommand”调用发送刷新全部端口指令。
2)等待输入缓冲的输出缓冲的两个EventHandler事件回调,通知框架状态变换完成(OMX_EventCmdComplete)。
刷新命令来了之后,PV框架立刻停止向OMX组件发送输入/输出缓冲。当组件接收到2个回调函数后,PV框架开始恢复发送输入/输出缓冲。
端口刷新的顺序和通告并不相关。
过程如图7。
为了防止动态端口被重复配置,也可以先于OMX IL用户关闭OMX组件端口调用端口刷新指令。
8 停止/变化到“IDLE”状态
为了停止处理过程,PV框架将:
1)通过“OMX_SendCommand”调用发送命令给OMX组件,将状态由OMX_StatePause改变为OMX_StateIdle。
2)等待OMX组件的EventHandler事件回调,通知框架状态变换完成(OMX_EventCmdComplete)。
过程见图8。
一些设想:
当命令完成“IDEL”态的回调后,PV框架假设所有输入输出缓冲按照OMX规范要求那样返回。
9 OMX组件状态转换 IDLE->Loaded State和 De-initialization
当PV框架结束与一个OMX组件的所有交互后,将:
1)通过“OMX_SendCommand”调用发送命令给OMX组件,将状态由OMX_StateIdle改变为OMX_StateLoaded。
2)向OMX组件发送一系列“OMX_FreeBuffer”调用。
3)等待OMX组件的EventHandler事件回调,通知框架状态变换完成(OMX_EventCmdComplete)。使用NumInputBuffer记录输入输入端口的数目,使用NumOutputBuffer记录输入输入端口的数目。
4)对OMX核心执行OMX_FreeHandle调用,释放组件句柄。
流程图见图9
注意:在向OMX组件发送卸载命令之前,PV框架一直在等待OMX组件返回的输入输出缓冲。由于回调的过程的不同步性,一些EmptyBufferDone/FillBufferDone的回调有可能在OMX组件状态由“executing” 到 “idle”之后才到达。
10 OMX Core 卸载
PV框架调用函数OMX_Deinit()。
OMX_Init()
没有什么好说的,初始化函数,一定要运行的.
OMX_GetHandle
得到某一个组件的句柄
OMX_API OMX_ERRORTYPE OMX_APIENTRY OMX_GetHandle(
OMX_OUT OMX_HANDLETYPE* pHandle,
OMX_IN OMX_STRING cComponentName,
OMX_IN OMX_PTR pAppData,
OMX_IN OMX_CALLBACKTYPE* pCallBacks);
OMX_GetExtensionIndex
除了标准OMX_INDEXTYPE中定义的以外,返回用户自定义的一些参数(第二个参数)对应的index(第三个参数,用在OMX_SetParameter...里面),用来configur或者parameter.
这些参数往往被定义在用户特殊的extension interface里面
#define OMX_GetExtensionIndex( /
hComponent, /
cParameterName, /
pIndexType) /
((OMX_COMPONENTTYPE*)hComponent)->GetExtensionIndex( /
hComponent, /
cParameterName, /
pIndexType) /* Macro End */
OMX_SetParameter
设定某个参数对应的值
#define OMX_SetParameter( /
hComponent, /
nParamIndex, /
pComponentParameterStructure) /
((OMX_COMPONENTTYPE*)hComponent)->SetParameter( /
hComponent, /
nParamIndex, /
pComponentParameterStructure) /* Macro End */
OMX_SetConfig
设定某个config值
#define OMX_SetConfig( /
hComponent, /
nConfigIndex, /
pComponentConfigStructure) /
((OMX_COMPONENTTYPE*)hComponent)->SetConfig( /
hComponent, /
nConfigIndex, /
pComponentConfigStructure) /* Macro End */
注意有时候,需要先停止某个组件(的某些端口),才能设置config 成功
OMX_SendCommand
一般的命令有:
OMX_CommandStateSet 、OMX_CommandFlush、OMX_CommandPortDisable" 、 "OMX_CommandPortEnable、CommandMarkBuffer
#define OMX_SendCommand( /
hComponent, /
Cmd, /
nParam, /
pCmdData) /
((OMX_COMPONENTTYPE*)hComponent)->SendCommand( /
hComponent, /
Cmd, /
nParam, /
pCmdData) /* Macro End */
例子:OMXSAFE(OMX_SendCommand(vrenderer, OMX_CommandPortEnable, 1, 0)); // 停下1对应的端口
OMX_SetupTunnel
将两个组件连接起来,实际会引起调用每个组件的ComponentTunnelRequest
OMX_API OMX_ERRORTYPE OMX_APIENTRY OMX_SetupTunnel(
OMX_IN OMX_HANDLETYPE hOutput,
OMX_IN OMX_U32 nPortOutput,
OMX_IN OMX_HANDLETYPE hInput,
OMX_IN OMX_U32 nPortInput);
例子:
OMXSAFE(OMX_SetupTunnel(reader, 0, vdecoder, 0)); // reader的0端口为出,vdecoder的0端口为入,连接成一个Tunnel
准备好后,就可以设置OMX_StateExecuting,来让这个流程活动起来了。
再以后,就可以通过OMX_StateIdle 来停下。
OMX_GetState
#define OMX_GetState( /
hComponent, /
pState) /
((OMX_COMPONENTTYPE*)hComponent)->GetState( /
hComponent, /
pState) /* Macro End */
一些新补充:
1:
OMX_PARAM_PORTDEFINITIONTYPE decOutputPortDef;
INIT_PARAM(decOutputPortDef);
decOutputPortDef.nPortIndex = 0;
err = OMX_GetParameter(pCtx->hReaderComp,
OMX_IndexParamPortDefinition,
&decOutputPortDef); // 利用IndexParamPortDefinition来得到组件的输出端口的属性
videoWidth = decOutputPortDef.format.video.nFrameWidth;
videoHeight = decOutputPortDef.format.video.nFrameHeight;
2:OMX_BUFFERHEADERTYPE *pOmxBufferHeader ;
// tell decoder output port that it will be using our buffer
err = OMX_UseBuffer(hDecodeComp,
&pOmxBufferHeader, //out
OMX_DECODE_OUTPUT_PORT,
NULL,
outSize,
(NvU8*)pOut);
将分配好的pOut指针和他的大小outSize,配成一个OMX_BUF, 并给pOmxBufferHeader,这样就通过OMX_UseBuffer,来得到一个以后能给他用的Buffer,指针用我们分配的。
3:
OMXErr = OMX_FillThisBuffer(hDecodeComp, pOmxBufferHeader);
让hDecodeComp将pOmxBufferHeader的数据准备好(就是输出数据),pOmxBufferHeader就是通过UseBuffer来组装的。
通过nFilledLen,可以得到具体数据填充情况。
如果OMX_FillThisBuffer是异步函数的话,那真正的返回是要靠:Callback_FillBufferDone 来设置真正数据ready信号















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









