







本文从此处转载点击打开链接
在许多应用场合中需要快速准确地检测出直线或者圆。其中一种非常有效的解决问题的方法是霍夫(Hough)变换,其为图像处理中从图像中识别几何形状的基本方法之一,应用很广泛,也有很多改进算法。最基本的霍夫变换是从黑白图像中检测直线(线段)。
霍夫变换是在边缘检测的基础上提取边缘的特征,快速从找出边缘中的线段或圆,改进的霍夫变换可以识别出其他的几何形状。【1】众所周知, 一条直线在图像二维空间可由两个变量表示. 如:
<1>在笛卡尔坐标系: 可由参数: 斜率和截距(m,b) 表示。
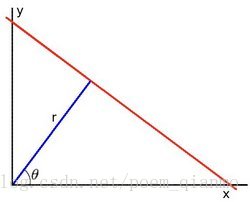
<2>在极坐标系: 可由参数: 极径和极角
表示。
对于霍夫变换, 我们将采用第二种方式极坐标系来表示直线. 因此, 直线的表达式可为:
化简便可得到:
【2】一般来说对于点
, 我们可以将通过这个点的一族直线统一定义为:
这就意味着每一对
代表一条通过点
【3】如果对于一个给定点
只绘出满足下列条件的点
和
.
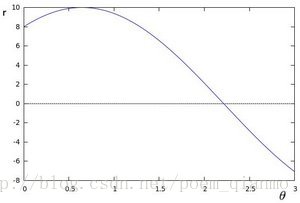
【4】我们可以对图像中所有的点进行上述操作. 如果两个不同点进行上述操作后得到的曲线在平面
相交, 这就意味着它
们通过同一条直线. 例如,接上面的例子我们继续对点
和点
绘图, 得到下图:
这三条曲线在平面相交于点 (0.925, 9.6), 坐标表示的是参数对
或者是说点
和点
组成的平面内的的直线。
【5】以上的说明表明,一般来说, 一条直线能够通过在平面
【6】这就是霍夫线变换要做的. 它追踪图像中每个点对应曲线间的交点. 如果交于一点的曲线的数量超过了阈值, 那么可以认为这个交点所代表的参数对
在原图像中为一条直线。
OpenCV中的霍夫线变换
我们知道,霍夫线变换是一种用来寻找直线的方法. 在使用霍夫线变换之前, 首先要对图像进行边缘检测的处理,也即霍夫线变换的直接输入只能是边缘二值图像.
在OpenCV中,我们可以用HoughLines函数来调用标准霍夫变换SHT和多尺度霍夫变换MSHT。
而HoughLinesP函数用于调用累计概率霍夫变换PPHT。累计概率霍夫变换执行效率很高,所有相比于HoughLines函数,我们更倾向于使用HoughLinesP函数。
HoughLines( )函数详解
此函数可以找出采用标准霍夫变换的二值图像线条。在OpenCV中,我们可以用其来调用标准霍夫变换SHT和多尺度霍夫变换MSHT的OpenCV内建算法。
- 第一个参数,InputArray类型的image,输入图像,即源图像,需为8位的单通道二进制图像,可以将任意的源图载入进来后由函数修改成此格式后,再填在这里。
- 第二个参数,InputArray类型的lines,经过调用HoughLines函数后储存了霍夫线变换检测到线条的输出矢量。每一条线由具有两个元素的矢量
表示,其中,
是离坐标原点((0,0)(也就是图像的左上角)的距离。
是弧度线条旋转角度(0~垂直线,π/2~水平线)。
- 第三个参数,double类型的rho,以像素为单位的距离精度。另一种形容方式是直线搜索时的进步尺寸的单位半径。PS:Latex中/rho就表示
- 第四个参数,double类型的theta,以弧度为单位的角度精度。另一种形容方式是直线搜索时的进步尺寸的单位角度。
- 第五个参数,int类型的threshold,累加平面的阈值参数,即识别某部分为图中的一条直线时它在累加平面中必须达到的值。大于阈值threshold的线段才可以被检测通过并返回到结果中。
- 第六个参数,double类型的srn,有默认值0。对于多尺度的霍夫变换,这是第三个参数进步尺寸rho的除数距离。粗略的累加器进步尺寸直接是第三个参数rho,而精确的累加器进步尺寸为rho/srn。
- 第七个参数,double类型的stn,有默认值0,对于多尺度霍夫变换,srn表示第四个参数进步尺寸的单位角度theta的除数距离。且如果srn和stn同时为0,就表示使用经典的霍夫变换。否则,这两个参数应该都为正数。
另外,关于霍夫变换的详细解释,可以看此英文页面:
http://homepages.inf.ed.ac.uk/rbf/HIPR2/hough.htm
HoughLinesP( )函数详解
此函数在HoughLines的基础上末尾加了一个代表Probabilistic(概率)的P,表明它可以采用累计概率霍夫变换(PPHT)来找出二值图像中的直线。
- 第一个参数,InputArray类型的image,输入图像,即源图像,需为8位的单通道二进制图像,可以将任意的源图载入进来后由函数修改成此格式后,再填在这里。
- 第二个参数,InputArray类型的lines,经过调用HoughLinesP函数后后存储了检测到的线条的输出矢量,每一条线由具有四个元素的矢量(x_1,y_1, x_2, y_2) 表示,其中,(x_1, y_1)和(x_2, y_2) 是是每个检测到的线段的结束点。
- 第三个参数,double类型的rho,以像素为单位的距离精度。另一种形容方式是直线搜索时的进步尺寸的单位半径。
- 第四个参数,double类型的theta,以弧度为单位的角度精度。另一种形容方式是直线搜索时的进步尺寸的单位角度。
- 第五个参数,int类型的threshold,累加平面的阈值参数,即识别某部分为图中的一条直线时它在累加平面中必须达到的值。大于阈值threshold的线段才可以被检测通过并返回到结果中。
- 第六个参数,double类型的minLineLength,有默认值0,表示最低线段的长度,比这个设定参数短的线段就不能被显现出来。
- 第七个参数,double类型的maxLineGap,有默认值0,允许将同一行点与点之间连接起来的最大的距离。
两个函数的比较:1. 累计概率霍夫变换(PPHT)算法是标准霍夫变换(SHT)算法的一个改进,它在一定的范围内进行霍夫变换,计算单独线段的方向以及范围,从而减少计算量,缩短计算时间。之所以称PPHT为“概率”的,是因为并不将累加器平面内的所有可能的点累加,而只是累加其中的一部分,该想法是如果峰值如果足够高,只用一小部分时间去寻找它就够了。这样猜想的话,可以实质性地减少计算时间。2.PPHT的HoughLinesP运算后得到的输出矢量(x_1,y_1, x_2, y_2) ,其中,(x_1, y_1)和(x_2, y_2) 是是每个检测到的线段的结束点,可以清楚知道每个矢量的起始位置。而SHT和MSFT得到的结果只能是与矢量垂直的直线,可以无限延长。3.在进行霍夫变换前,需要进行边缘检测和转化为灰度图
- Canny(srcImage, midImage, 50, 200, 3);//进行一此canny边缘检测
- cvtColor(midImage,dstImage, CV_GRAY2BGR);//转化边缘检测后的图为灰度图
















 4万+
4万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









