







1、邻接矩阵
图的邻接矩阵(Adjacency Matrix)存储方式是用两个数组来表示图。
一个一维数组存储图中顶点信息,一个二维数组(称为邻接矩阵)存储图中的边或弧的信息。
设图G有n个顶点,则邻接矩阵是一个nxn的方阵,定义为:
Arc[i][j]=1,若(vi,vj)∈E或<vi,vj>∈E,反之等于0。如下图是一个简单无向图。
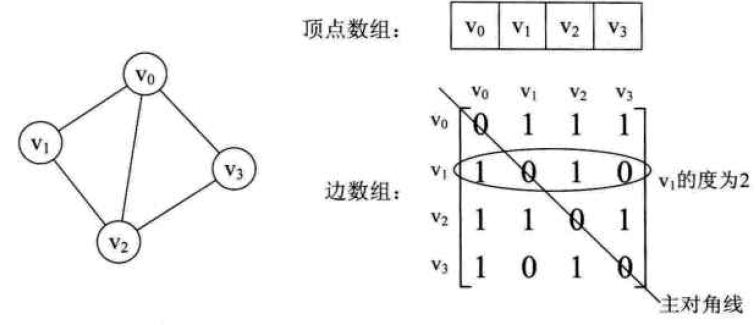
我们可以设置两个数组,顶点数组为vertex[4]={v0,v1,v2,v3},边数组arc[4][4]为上图的矩阵。
对于矩阵的主对角线的值,即arc[0][0],arc[1][1],arc[2][2],arc[3][3]全为0是因为不存在顶点到自身的边,比如v0到v0。
Arc[0][1]=1是因为v0到v1的边存在,而arc[1][3]=0是因为v1到v3的边不存在。
由于是无向图,v1到v3的边不存在,意味着v3到v1的边也不存在。所以无向图的边数组是一个对称矩阵。
--要知道某个顶点的度,其实就是这个顶点vi在邻接矩阵中第i行(或第i列)的元素之和。
下图是一个有向图:
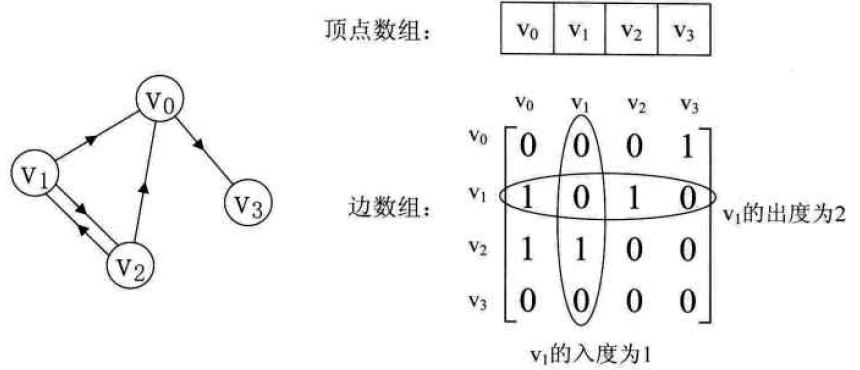
顶点数组为vertex[4]={v0,v1,v2,v3},弧数组arc[4][4]为上图的矩阵。
主对角线上数值依然为0.但因为是有向图,所以此矩阵并不对称,比如从v1到v0有弧,得到arc[1][0]=1,
而v0到v1没有弧,因此arc[0][1]=0。
有向图论入度和出度,顶点v1的入度为1,正好是第v1列上的数之和。
顶点v1的出度为2,即第v1行的各数之和。与无向图同样的办法,判断顶点vi到vj是否存在弧,只需要查找矩阵
中arc[i][j]是否为1即可。要想知道vi的所有邻接点就是将矩阵第i行元素扫描一遍,查找arc[i][j]为1的顶点。
typedef char VertexType;
typedef int EdgeType;
#define Maxvex 100
#define Infinity 65535
typedef struct
{
VertexType vexs[Maxvex]; //顶点表
EdgeType arc[Maxvex][Maxvex]; //邻接矩阵,可看作边表
int numVertexes,numEdges; //图中当前的顶点数和边数
}MGraph;
//有了上面的结构定义,构造一个图,其实就是给顶点表和边表输入数据的过程。
//建立无向网图的邻接矩阵表示
void CreateMGraph(MGraph *G)
{
int i,j,k,w;
printf("请输入顶点数和边数:\n");
scanf("%d,%d",&G->numVertexes,&G->numEdges);
for(i=0;i<G->numVertexes;i++)
{
scanf(&G->vexs[i]);
}
for(i=0;i<G->numVertexes;i++)
for(j=0;j<G->numVertexes;i++)
G->arc[i][j]=Infinity; //邻接矩阵初始化
for(k=0;k<G->numEdges;k++)
{
printf("输入边(vi,vj)的下标i,下标j和权w:\n");
scanf("%d,%d,%d",&i,&j,&w);
G->arc[i][j]=w;
G->arc[j][i]=G->arc[i][j];
}
}
从代码中可以得到:n个顶点和e条边的无向网图的创建,时间复杂度是O(n+n^2+e).
2、邻接表
我们发现,当图中的边数相对于顶点较少时,邻接矩阵是对存储空间的极大浪费。我们可以考虑对边或弧使用链式存储的方式来避免空间浪费的问题。回忆树结构的孩子表示法,将结点存入数组,并对结点的孩子进行链式存储,不管有多少孩子,也不会存在空间浪费问题。
应用这种思路,我们把这种数组与链表相结合的存储方法称为邻接表(Adjacency List)。
邻接表的处理办法是这样。
1) 图中顶点用一个一维数组存储,当然也可以用单链表来存储,不过用数组可以较容易的读取顶点信息,更加方便。另外,对于顶点数组中,每个数据元素还需要存储指向第一个邻接点的指针,以便于查找该顶点的边信息。
2) 图中每个顶点vi的所有邻接点构成一个线性表,由于邻接点的个数不定,所以用单链表存储,无向图称为顶点vi的边表,有向图则称为以vi为弧尾的出边表。
下图是一个无向图的邻接表结构:
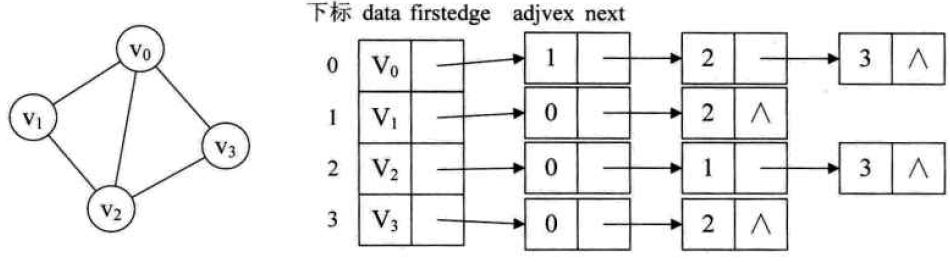
从图中我们知道,顶点表的各个结点由data和firstedge两个域表示,data是数据域,存储顶点的信息。
firstedge是指针域,指向边表的第一个结点,即此顶点的第一个邻接点。
边表结点由adjvex和next两个域组成。adjvex是邻接点域,存储某顶点的邻接点在顶点表中的下标,next则存储指
向边表中下一个结点的指针,比如v1顶点与v0、v2互为邻接点,则在v1的边表中,adjvex分别为v0的0和v2的2.
如果想知道某个顶点的度,就去查找这个顶点的边表中结点的各数。
若要判断顶点vi和vj是否存在边,只需要测试顶点vi的边表adjvex中是否存在结点vj的下标就行了。
若求顶点的所有邻接点,其实就是对此顶点的边表进行遍历,得到的adjvex域对应的顶点就是邻接点。
有向图的邻接表中顶点vi的边表是指以vi为弧尾的弧来存储的,这样很容易就可以得到每个顶点的出度。
有时为了便于确定顶点的入度或以顶点为弧头的弧,可以建立一个有向图的逆邻接表,即对每个顶点vi都建立
一个链接为vi为弧头的表。如下图所示:
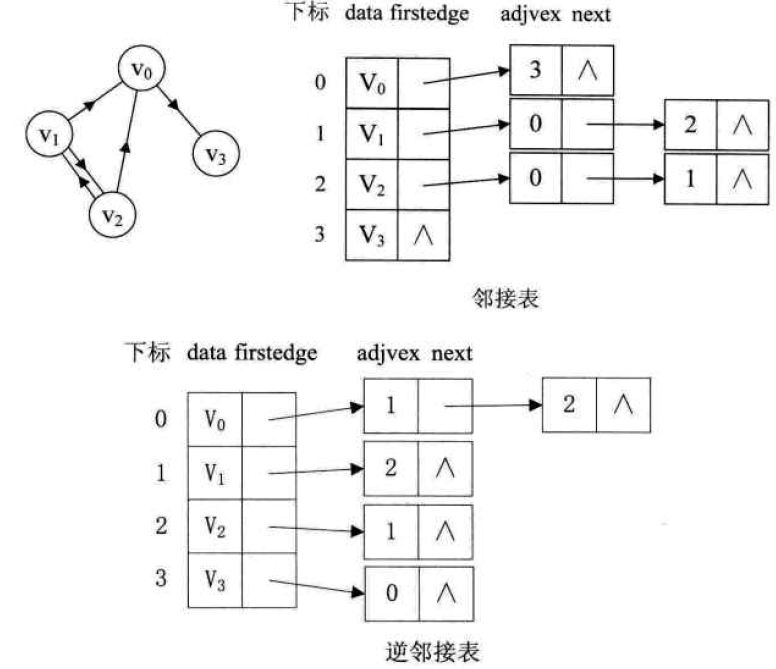
此时我们很容易就可以算出某个顶点的入度或出度是多少,判断两顶点是否存在弧也很容易实现。
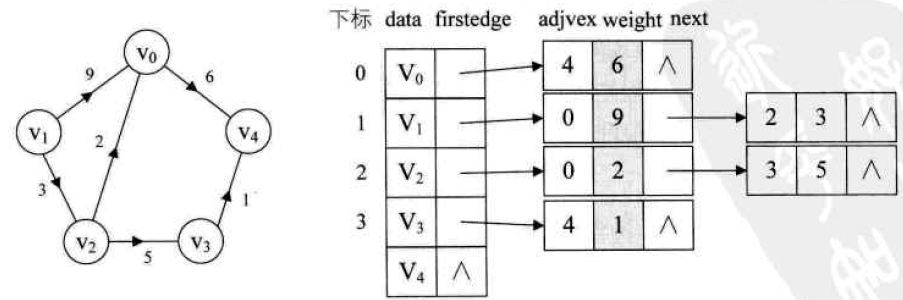
对于带权值的网图,可以在边表结点定义中再增加一个weight的数据域,存储权值信息即可,如下图所示:
//结点的定义
typedef char VertexType;
typedef int EdgeType;
#define MaxVex 100
typedef struct EdgeNode //边表结点
{
int adjvex; //邻接点域,存储邻接顶点对应的下标
EdgeType weight; //用于存储权值,对于非网图可以不需要
struct EdgeNode *next; //链域,指向下一个邻接点
}EdgeNode;
typedef struct VertexNode //顶点表结点
{
VertexType data; //顶点域,存储顶点信息
EdgeNode *firstedge; //边表头指针
}VertexNode,AdjList[MaxVex];
typedef struct
{
AdjList adjList;
int numVertexes,numEdges; //图中当前顶点数和边数
}GraphAdjList;
//建立无向图的邻接表结构
void CreateALGraph(GraphAdjList *G)
{
int i,j,k;
EdgeNode *e;
printf("输入顶点数和边数:\n");
scanf("%d,%d",&G->numVertexes,&G->numEdges);
for(i=0;i<G->numVertexes;i++)
{
scanf(&G->adjList[i].data); //输入顶点信息
G->adjList[i].firstedge = NULL; //将边表置为空表
}
for(k=0;k<G->numEdges;k++)
{
printf("输入边(vi,vj)上的顶点序号:\n");
scanf("%d,%d",&i,&j);
e = (EdgeNode *)malloc(sizeof(EdgeNode)); //向内存申请空间,生成边表结点
e->adjvex = j; //邻接序号为j
e->next = G->adjList[i].firstedge;
G->adjList[i].firstedge = e; //将当前顶点的指针指向e
e = (EdgeNode *)malloc(sizeof(EdgeNode));
e->adjvex = i; //邻接序号为i
e->next = G->adjList[j].firstedge;
G->adjList[j].firstedge = e;
}
}















 2083
2083

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









