







1、图的遍历
---- 图的遍历和树的遍历类似,我们希望从图中某一顶点出发访遍图中其余顶点,且使每个顶点仅被访问一次,这一过程
就叫做图的遍历(Traversing Graph)。
---- 树的遍历都是从根结点发起(只有一个),其余所有结点都只有一个双亲。可图就复杂多了,因为它的任一顶点都可能和其余的所有
顶点相邻接,极有可能存在沿着某条路径搜索后,又回到原顶点,而有些顶点却还没有遍历到的情况。因此我们需要在遍历过程中把访问
过的顶点打上标记,以避免访问多次而不自知。具体办法是设置一个访问数组visited[n],n是图中顶点的个数,初值为0,访问过后设置为1.
通常有两种图的遍历次序方案:它们是深度优先遍历和广度优先遍历。
2、深度优先遍历
---- 深度优先遍历(Depth First Search),有时也称为深度优先搜索,简称为DFS。
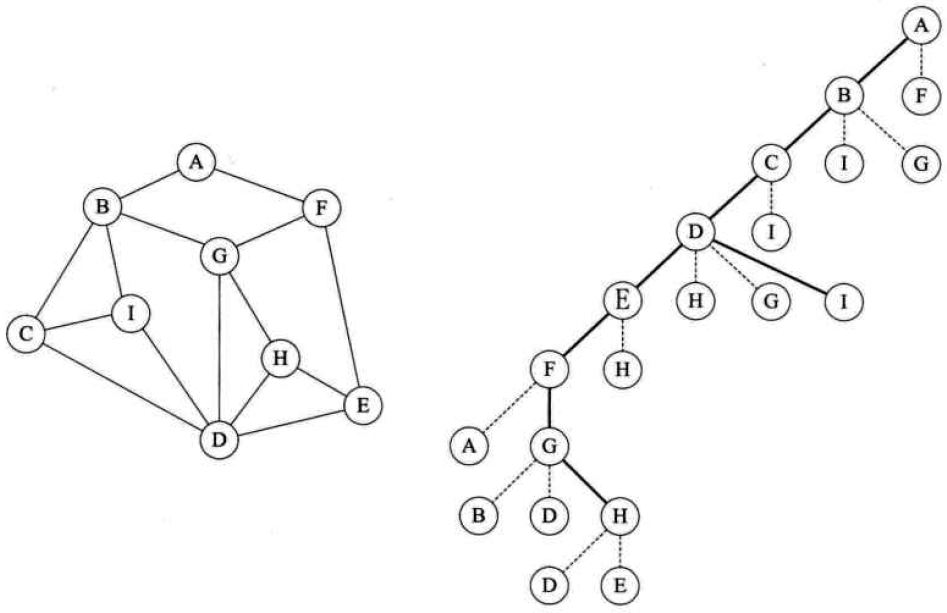
如上图所示,从顶点A开始要走遍图中所有的顶点并做上标记,首先我们从顶点A开始,做上表示走过的记号后,面前有两条路,通向B和F,
先定一个原则,在没有碰到重复顶点的情况下,始终是向右手边走,于是走到了B顶点。整个行路过程,可参看上图的右边,此时发现有三个
分支C、I、G,右边通行原则,我们走到了C顶点,遇到两个分支D和I,右边通行原则,走到D遇到分支H、G、I、E,走到E顶点,再到F,之后
是A,发现顶点A已经走过,返回到F,可以选择G顶点,它有三条通道B、D、H,发现B和D都已经是走过的,于是走到H,H之后的两条通道D和
E都已经走过了。此时我们是否已经遍历了所有的顶点呢?没有。按原路返回,在顶点H处,再无通道没走过,返回到G,也无未走过的通道,返回
到F,没有通道,返回到E,都走过了,返回到D,三个通道G、H、I,I是一个新顶点,没有走过,标记下来,继续返回直到返回顶点A,确认已经
遍历完所有的顶点,即完成任务。
---- 类似于一棵树的前序遍历,它从图中某个顶点v出发,访问此顶点,然后从v的未被访问的邻接点出发深度优先遍历图,直至图中所有和v有路径
相同的顶点都被访问到。这里提到的是连通图,对于非连通图,只需要对它的连通分量分别进行深度优先遍历,即在先前一个顶点进行一次深度优
先遍历后,若图中尚有顶点未被访问,则另选图中一个未曾被访问的顶点作为起始点,重复上述过程,直至图中所有顶点都被访问到为止。
如果我们用的是邻接矩阵的方式,则代码如下:
typedef char VertexType;
typedef int EdgeType;
#define Max 100
typedef struct
{
VertexType vexs[Max]; //顶点表
EdgeType arc[Max][Max]; //邻接矩阵,可看作边表
int numVertexes,numEdges; //图中当前的顶点数和边数
}MGraph;
bool visited[Max]; //访问标志的数组
//邻接矩阵的深度优先递归算法
void DFS(MGraph G,int i)
{
int j;
visited[i] = true;
printf("%c",G.vexs[i]); //打印顶点
for(j = 0;j<G.numVertexes;j++)
{
if(G.arc[i][j]==1 && !visited[j])
DFS(G,j);
}
}
//邻接矩阵的深度遍历操作
void DFSTraverse(MGraph G)
{
int i;
for(i = 0;i<G.numVertexes;i++)
visited[i] = false; //初始化所有顶点状态都是未访问过状态
for(i = 0;i<G.numVertexes;i++)
if(!visited[i]) //对未访问过的顶点调用DFS,若是连通图,只会执行一次
DFS(G,i);
}代码执行的过程,就是寻找所有顶点的过程。如果图结构是邻接表结构,其DFSTraverse函数的代码几乎是相同的,只是在递归函数中因为
将数组换成了链表而有所不同,代码如下:
//结点的定义
typedef char VertexType;
typedef int EdgeType;
#define Max 100
bool visited[Max];
typedef struct EdgeNode //边表结点
{
int adjvex; //邻接点域
EdgeType weight; //权值
struct EdgeNode *next;
}EdgeNode;
typedef struct VertexNode //顶点表结点
{
VertexType data; //顶点域
EdgeNode *firstedge; //边表头指针
}VertexNode,AdjList[Max];
typedef struct
{
AdjList adjList;
int numVertexes,numEdges; //图中当前顶点数和边数
}GraphAdjList;
//邻接表的深度优先递归算法
void DFS(GraphAdjList *GL,int i)
{
EdgeNode *p;
visited[i] = true;
printf("%c",GL->adjList[i].data);
p = GL->adjList[i].firstedge;
while(p)
{
if(!visited[p->adjvex])
DFS(GL,p->adjvex); //对未访问的邻接顶点进行递归调用
p = p->next;
}
}
//邻接表的深度优先遍历操作
void DFSTraverse(GraphAdjList GL)
{
int i;
for(i = 0;i<GL.numVertexes;i++)
visited[i] = false;
for(i = 0;i<GL.numVertexes;i++)
if(!visited[i])
DFS(&GL,i);
}对比两个不同存储结构的深度优先遍历算法,对于n个顶点e条边的图来说,邻接矩阵由于是二维数组,要查找每个顶点的邻接点需要访问矩阵中的
所有元素,因此都需要O(n^2)的时间。而邻接表做存储结构时,找邻接点所需的时间取决于顶点和边的数量,所以是O(n+e).显然对于点多边少的
稀疏图来说,邻接表结构使得算法在时间效率上大大提高。
3、广度优先遍历
---- 广度优先遍历(Breadth First Search),又称为广度优先搜索,简称BFS。如果说图的深度优先遍历类似于树的前序遍历,那么图的广度优先
遍历就类似于树的层序遍历了。将上一幅图稍微变形,变形原则是顶点A放置在最上第一层,让与它有边的顶点B、F为第二层,再让与B和F有边
的顶点C、I、G、E为第三层,再将与这四个顶点有边的D、H放在第四层,如下图右图所示,此时在视觉上感觉图的形状发生了变化,其实顶点
和边的关系还是完全相同的。
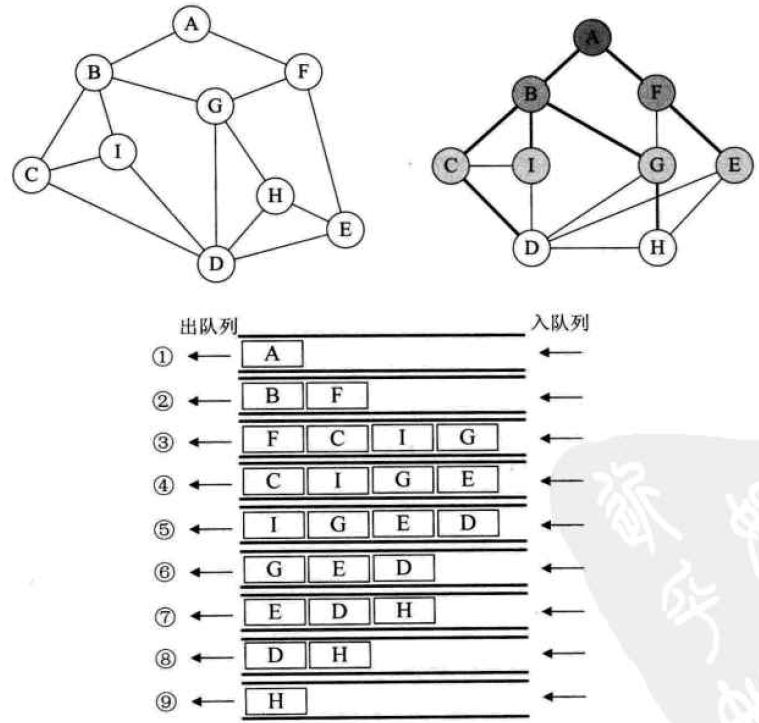
图的深度优先遍历与广度优先遍历算法在时间复杂度上是一样的,不同之处仅仅在于对顶点访问顺序的不同。















 437
437

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









