







以KK的dalvik源码为基础来解析。
使用的源码基于https://github.com/AOKP/dalvik, 可以从https://github.com/AOKP/dalvik/archive/kitkat.zip 下载。
我是在linux下,使用vim + ctags做分析的。
由于ARM架构是使用最多也是最频繁的架构,所以我分析的重点是ARM的汇编如何实现解释器的。所以我在分析过程中会忽略掉与ARM无关的代码。
入口是什么?
从dvmCallMethod开始分析。这个函数是调用一个java method的主要入口函数。
dvmCallMethod->dvmCallMethodV->dvmInterpret->dvmMterpStd->dvmMterpStdRun
这一串调用,最终走到了dvmMterpStdRun函数。这个函数是用汇编写成的,在ARM架构中,实现的文件是vm/mterp/out/InterpAsm-armv7-a-neon.S。这个是Android KK ARM版本中使用的文件,也是我们分析的重点。
说了半天,dvmMterpStdRun是干什么的?其实就是用于解释实现各个dex 指令的,是整个解释的核心。不过,在正式了解这个函数之前,我们要分别了解下dvmCallMethodV,dvmInterpret,dvmMethodStd这3个函数的主要功能和涉及到的数据结构。
这些函数并不直接执行代码,但是却为dvmMterpStdRun准备了运行环境,只有理解了这些运行环境,才能更好的理解解释器的工作原理。
dvmCallMethodV
这个函数的核心作用是创建虚拟栈。
首先,我们了解下,一个普通的java method调用链条中的虚拟栈是怎么组织的。
dvmCallMethodV中完成栈构建的函数在callPrep->dvmPushInterpFrame
普通java method的虚拟栈
DVM为解释器分配的专门的栈,每个java线程有一个。这些信息保存在Thread结构体中。
//vm/interp/InterpState.h
struct InterpSaveState {
const u2* pc; // Dalvik PC
u4* curFrame; // Dalvik frame pointer
const Method *method; // Method being executed
DvmDex* methodClassDex;
JValue retval;
void* bailPtr;
....
struct InterpSaveState* prev; // To follow nested activations
} __attribute__ ((__packed__));
//vm/Thread.h
/*
* Our per-thread data.
*
* These are allocated on the system heap.
*/
struct Thread {
/*
* Interpreter state which must be preserved across nested
* interpreter invocations (via JNI callbacks). Must be the first
* element in Thread.
*/
InterpSaveState interpSave;
.....
/* current limit of stack; flexes for StackOverflowError */
const u1* interpStackEnd;
......
/* start (high addr) of interp stack (subtract size to get malloc addr) */
u1* interpStackStart;
......
};Thread的interpStackStart和interpStackEnd表示虚拟栈的开始和结束范围。注意,栈的增长方向是由高地址向低地址曾长,因此inpterpStackStart >interpStackEnd。
inpterpSave的curFrame记录了当前虚拟栈(Frame)的位置。
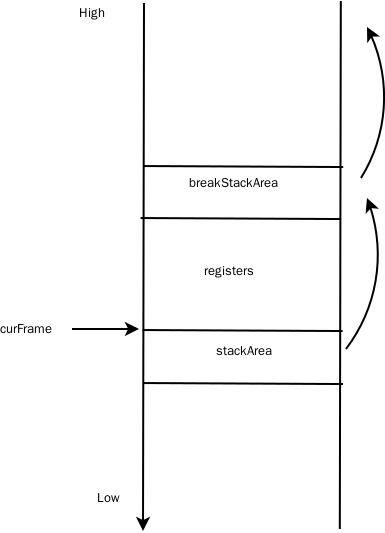
我用下面的表来表示虚拟栈的组成部分:

- StackSaveArea保存的是一个method 栈的信息,如当前的Method, 调用的PC地址,返回值地址等,还有prevFrame,指向Caller的frame地址;
- curFrame保存当前函数的Frane地址。这个地址不包含StackSaveArea的指针。
- method的registersSize指出全部寄存器的个数,包括用作参数传递的寄存器个数;
- method的insSize指出作为参数的寄存器的个数;
- method的outsSize指出该函数调用其他函数需要的寄存器个数
关于registerSize,insSize和outsSize的关系,以下几点:
- 参数寄存器 (ins registers)是全部寄存器的一部分,所以,insSize < registerSize;
- outsSize是调用其他函数需要的寄存器个数,这只是一个参考值。因为一个函数可以调用N个函数,这些被调用的函数的参数个数不一样,所以,outsSize总是取被调用函数中参数最多的那个值作为它的值;
- 假设函数A调用函数B,A 向它的out register写入调用参数,当进入B函数后,A的out register就变成了B的ins register。这样,B就可以直接访问A传递过来的参数了。
- ins register是register的一部分,在函数内部是可以参与运算的。因为需要和调用者共用,所以ins register总是位于虚拟栈的最高地址处。
关于参数,还需有注意一点:非静态函数,参数P0被隐含定义为this指针。
dvmCallMethodV的栈特点
dvmCallMethodV要插入一个BreakStackSaveArea对象,这也是个StackSaveArea,用于模拟一个栈,保证调用链条的连续性。
如下图:
dvmInterpret
该函数是解释模式的入口函数。在介绍这个函数之前,需要介绍两个重要的概念:InterpSaveState和ExecutionSubModes
InterpSaveState
InterpSaveState 结构体保存在Thread中,用于存储解释模式中重要的数据结构。它的定义如下: (vm/interp/InterpState.h)
struct InterpSaveState {
const u2* pc; // Dalvik PC
u4* curFrame; // Dalvik frame pointer
const Method *method; // Method being executed
DvmDex* methodClassDex;
JValue retval;
void* bailPtr;
#if defined(WITH_TRACKREF_CHECKS)
int debugTrackedRefStart;
#else
int unused; // Keep struct size constant
#endif
struct InterpSaveState* prev; // To follow nested activations
} __attribute__ ((__packed__));- pc: 保存的是当前正在执行的dalvik代码的地址
- curFrame: 当前的frame地址,与StackSaveArea中的 curFrame是一致的
- method: 当前调用的Method对象
- methodClassDex: 当前method所属的DvmDex对象。这个对象包含了一个Dex文件对象和解析表(ResolvedClasses, ResolvedMethod, ResolvedString和ResolevedField等)
- retval:返回值
- bailPtr: 保存的是寄存器sp的地址,用于恢复解释器的堆栈
- prev:指向上一个InterpSaveState对象。这个链表的建立就是在dvmIntepreter函数中实现的。
解释器要不断的更新这些值,保持这些值与运行状态一致。
ExecutionSubModes
它是一个枚举值,它的定义如下:
/*
* Execution sub modes, e.g. debugging, profiling, etc.
* Treated as bit flags for fast access. These values are used directly
* by assembly code in the mterp interpeter and may also be used by
* code generated by the JIT. Take care when changing.
*/
enum ExecutionSubModes {
kSubModeNormal = 0x0000, /* No active subMode */
kSubModeMethodTrace = 0x0001,
kSubModeEmulatorTrace = 0x0002,
kSubModeInstCounting = 0x0004,
kSubModeDebuggerActive = 0x0008,
kSubModeSuspendPending = 0x0010,
kSubModeCallbackPending = 0x0020,
kSubModeCountedStep = 0x0040,
kSubModeCheckAlways = 0x0080,
kSubModeSampleTrace = 0x0100,
kSubModeJitTraceBuild = 0x4000,
kSubModeJitSV = 0x8000,
kSubModeDebugProfile = (kSubModeMethodTrace |
kSubModeEmulatorTrace |
kSubModeInstCounting |
kSubModeDebuggerActive)
};整个mode可以分为两类,第一类是kSubModeNormal,这种模式下,解释器正常执行dalvik的字节码;其余可以归结为另一类,这类模式下,在执行dalvik字节码之前,先要调用一个dvmCheckBefore函数,这个函数会根据不同的submode,执行不同的操作,为debug,jit的trace code等功能,提供入口。
这个枚举值记录在Thread::InterpBreak.ctl.subMode中。
他通过调用 dvmDisableSubMode/dvmEnableSubMode -> updateInterpBreak函数来实现对模式的切换。
/*
* Update interpBreak for a single thread.
*/
void updateInterpBreak(Thread* thread, ExecutionSubModes subMode, bool enable)
{
InterpBreak oldValue, newValue;
do {
.....
#ifndef DVM_NO_ASM_INTERP
newValue.ctl.curHandlerTable = (newValue.ctl.breakFlags) ?
thread->altHandlerTable : thread->mainHandlerTable;
#endif
} while (dvmQuasiAtomicCas64(oldValue.all, newValue.all,
&thread->interpBreak.all) != 0);
};
#endif
} while (dvmQuasiAtomicCas 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









