







 文章介绍了一种通过旋转约束和条件迭代来处理零件装配中的多约束问题的方法。在公差分析中,不仅考虑装配处的公差,还涉及零件间的干涉和止位。案例展示了在装配脚片、锥销和转轴的过程中,如何确保脚片外边缘波动量在1mm内。通过迭代装配,检查并消除与上止位的干涉,从而提高合格率。
文章介绍了一种通过旋转约束和条件迭代来处理零件装配中的多约束问题的方法。在公差分析中,不仅考虑装配处的公差,还涉及零件间的干涉和止位。案例展示了在装配脚片、锥销和转轴的过程中,如何确保脚片外边缘波动量在1mm内。通过迭代装配,检查并消除与上止位的干涉,从而提高合格率。
零件多约束问题,怎么办?
一、模型准备
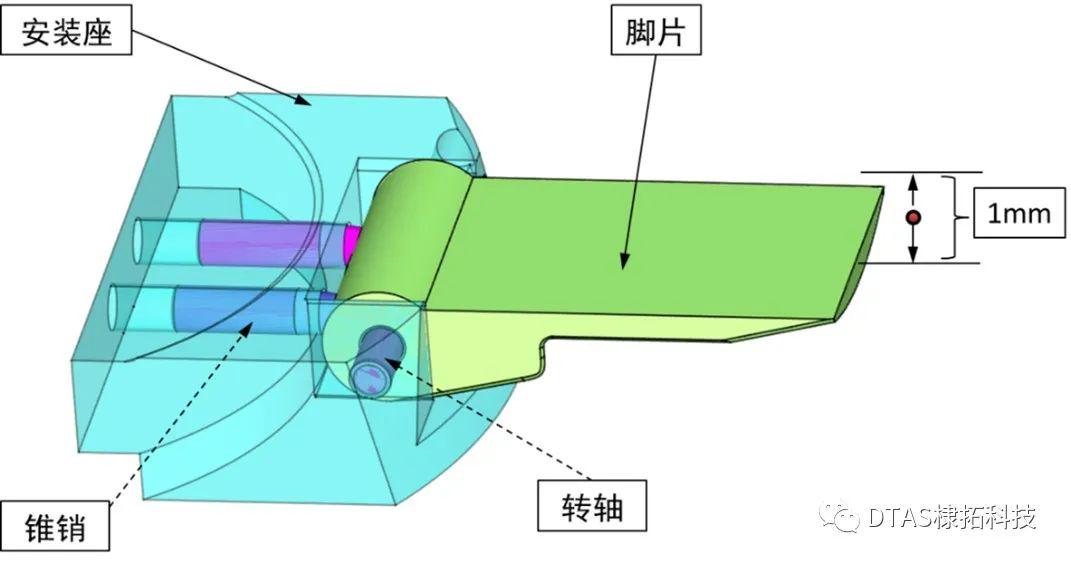
公差分析中需要考虑各种因素的影响,校核某一部位是否合格的时候,除了需要考虑装配处的公差,还需要其他零件与之的干涉以及止位作用等。今天的案例使用旋转约束及条件迭代的方式解决多约束问题。
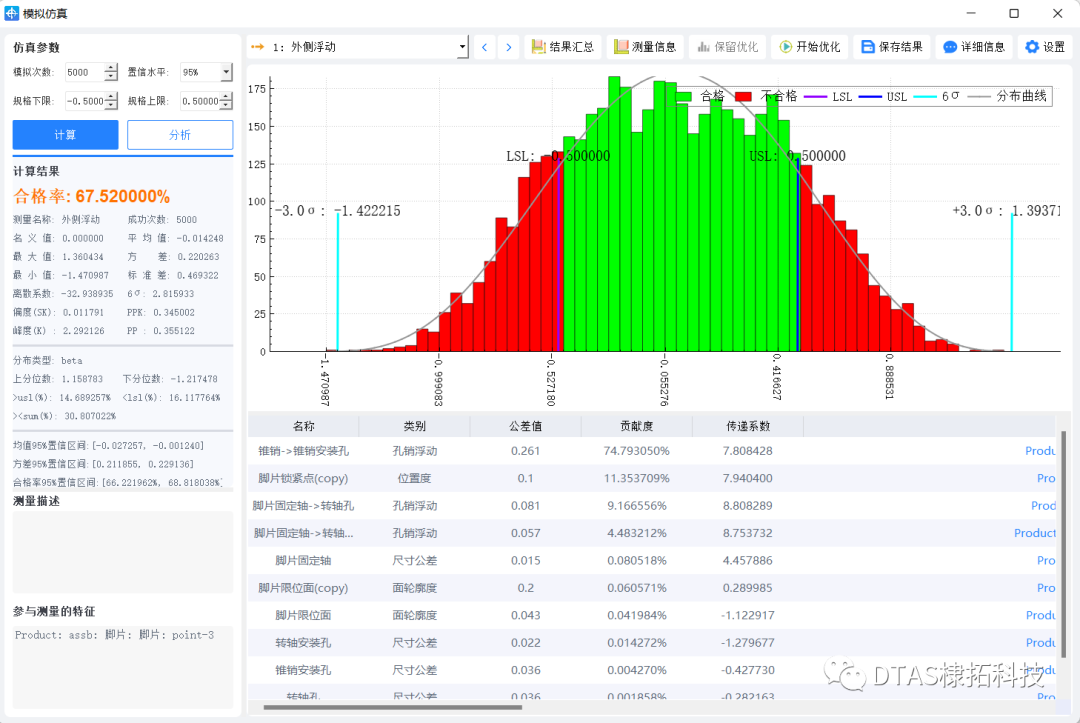
在当前的公差和制造工艺下,是否能保证保证脚片外边缘波动量在1mm。
装配工艺流程
零件公差
二、装配步骤
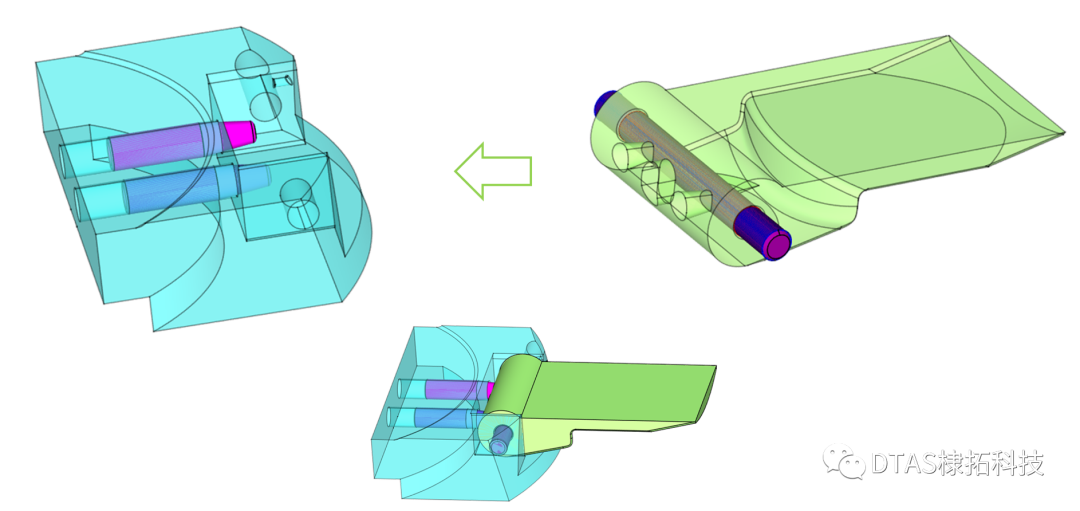
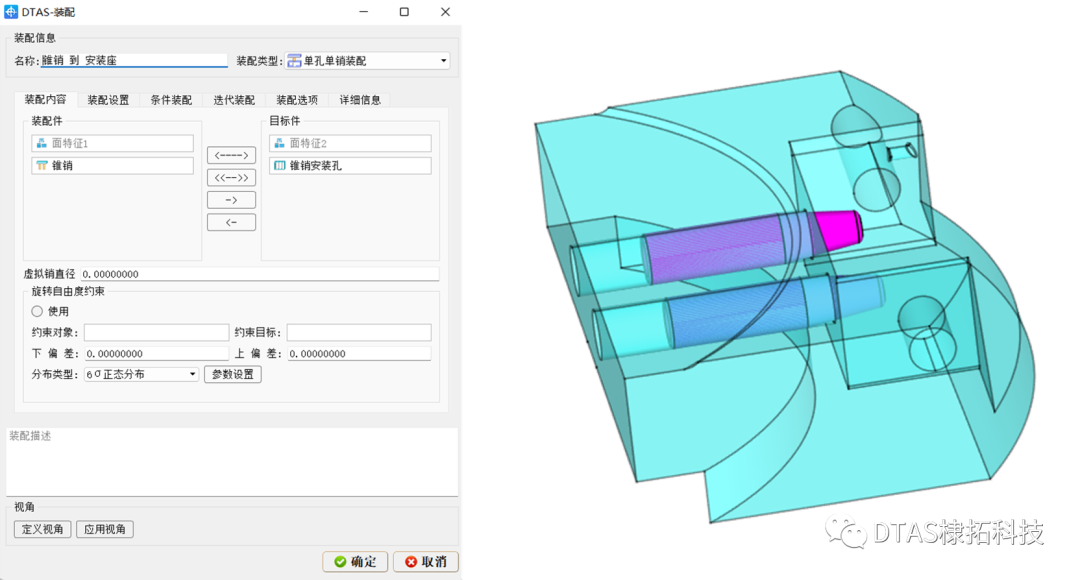
Step1锥销安装到安装座 >>
装配方式:单孔单销
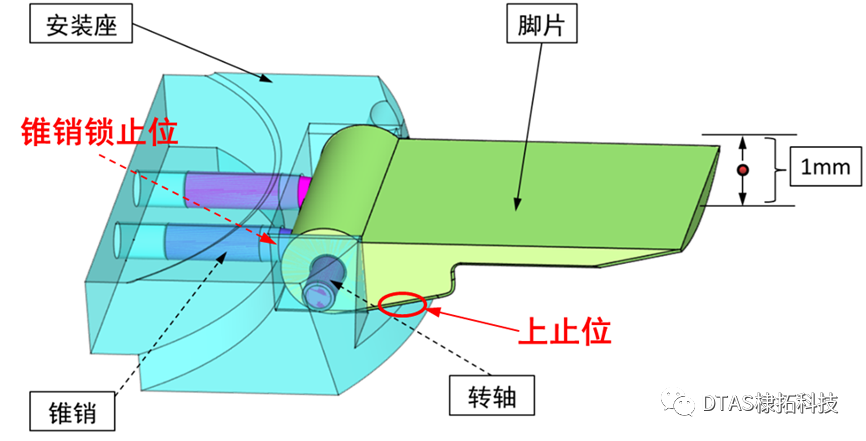
注:锥销与安装座是孔销配合,同时锥销对脚片起锁止位作用
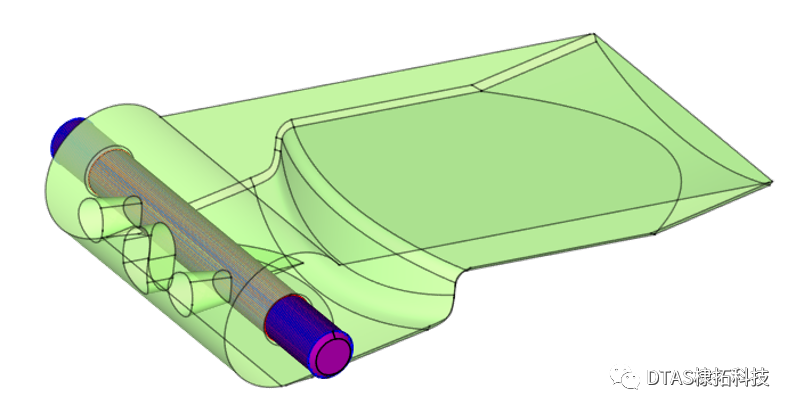
Step2:转轴安装到脚片上 >>
装配方式:单孔单销
注:转轴从安装座一端穿进去,先和脚片完成孔销配合
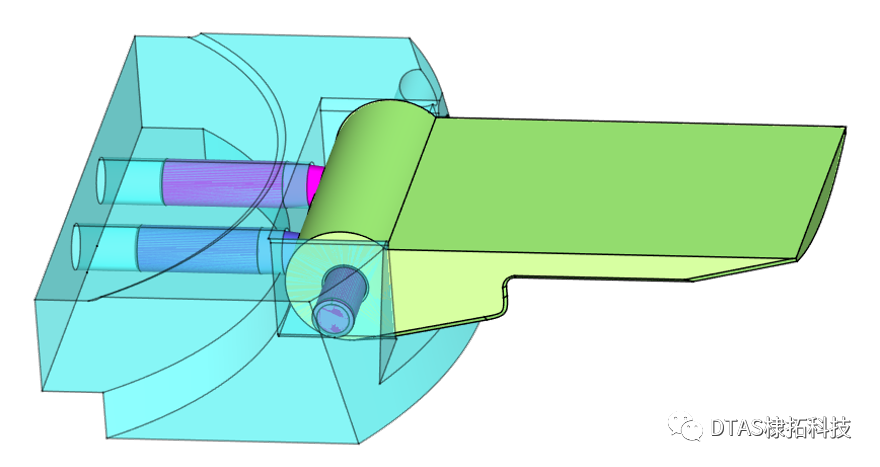
Step3:转轴和脚片装到安装座上>>
装配方式:单孔单销
注:脚片通过转轴安装到安装座,此时锥销推进去对脚片起到锁止位作用。
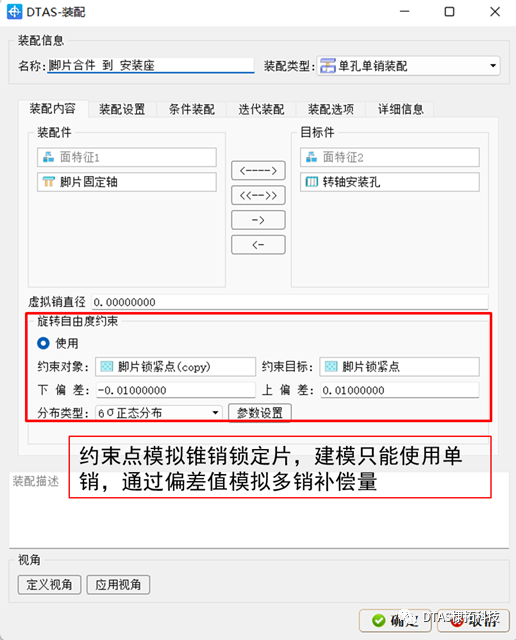
转自由度约束
在进行转轴到安装面安装的过程中,考虑锥销对脚片的止位作用,使脚片旋转到锁止位位置。
装配浮动动画
计算结果
三、迭代装配
通过设定条件将干涉消除
但是除了考虑锥销对脚片锁定,我们还需要考虑脚片下端和安装座面(即下图上止位位置)可能存在一定的干涉,我们需要通过设定条件将干涉消除。
迭代装配
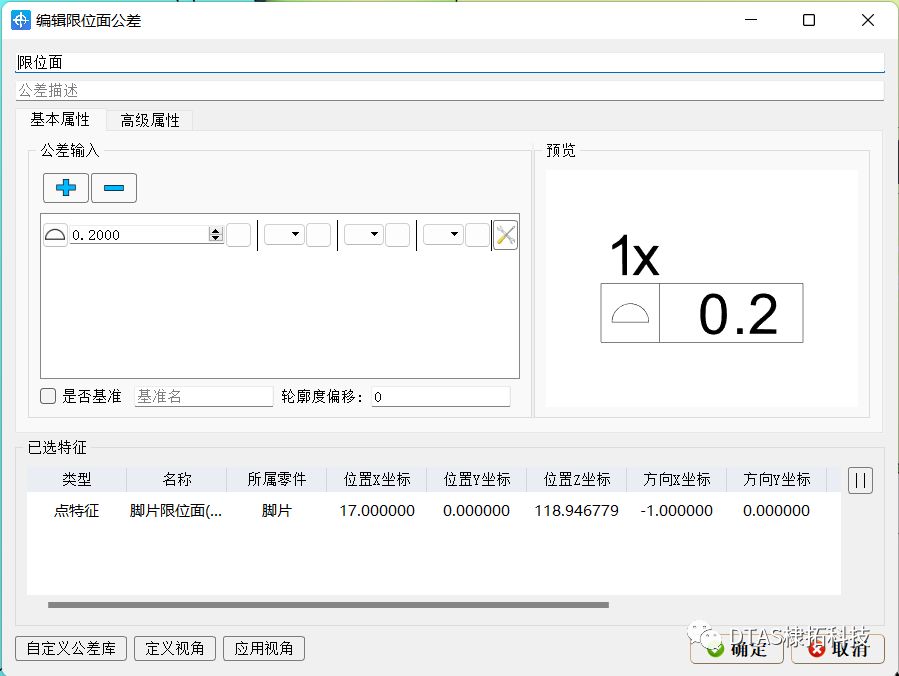
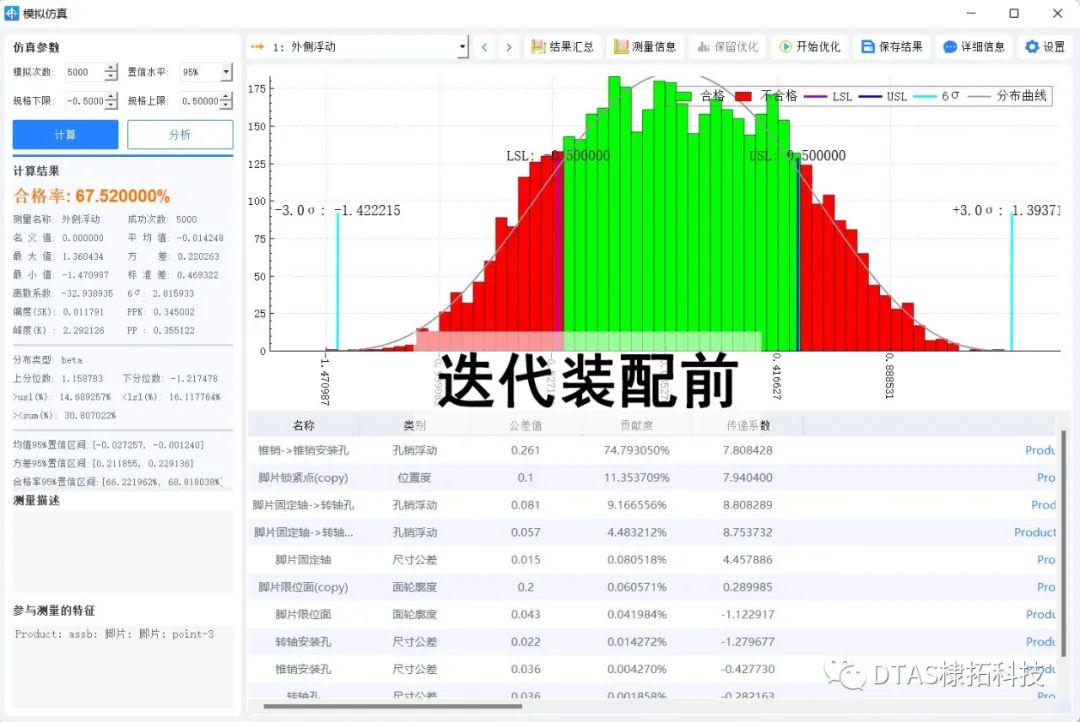
首先对干涉位置建立测量,启用装配中的迭代装配设置,检查约束条件中测量的结果,在止位面距离大于零的情况下判定此装配有效,反之上止位发生干涉的时候(限位点距离测量值小于0)将该装配重新执行一次,直到满足测量结果或达到迭代次数上限。

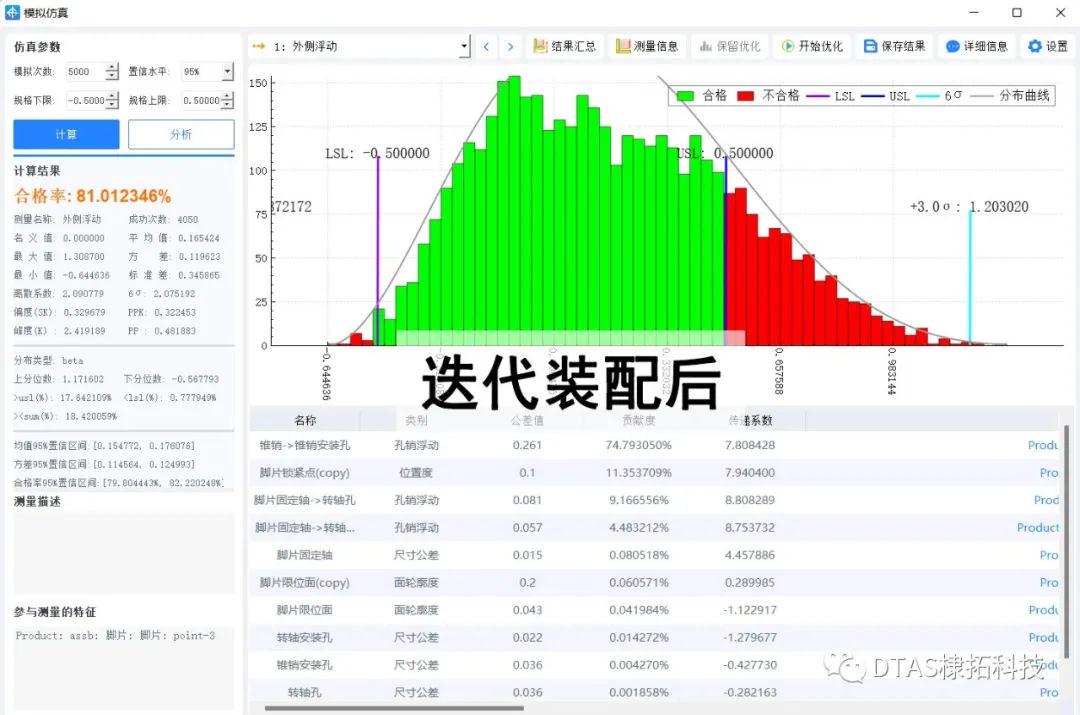
计算结果对比
在不考虑上止位的情况下,外端活动点活动量在1mm范围内的只有65.2%,通过迭代装配模拟上止位的存在,去除仿真结果中脚片超出上止点的情况,使仿真与实际情况更接近,合格率提高。



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











