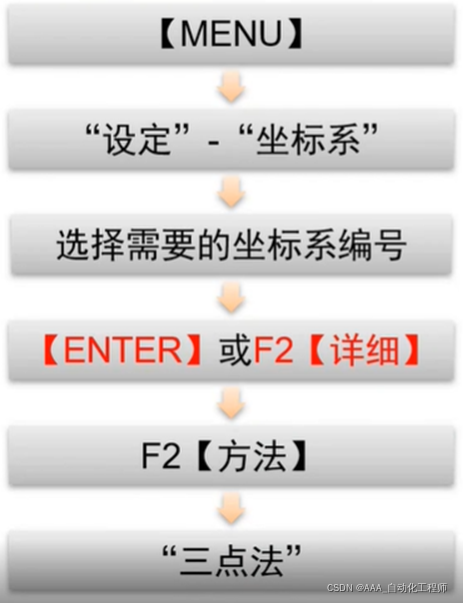
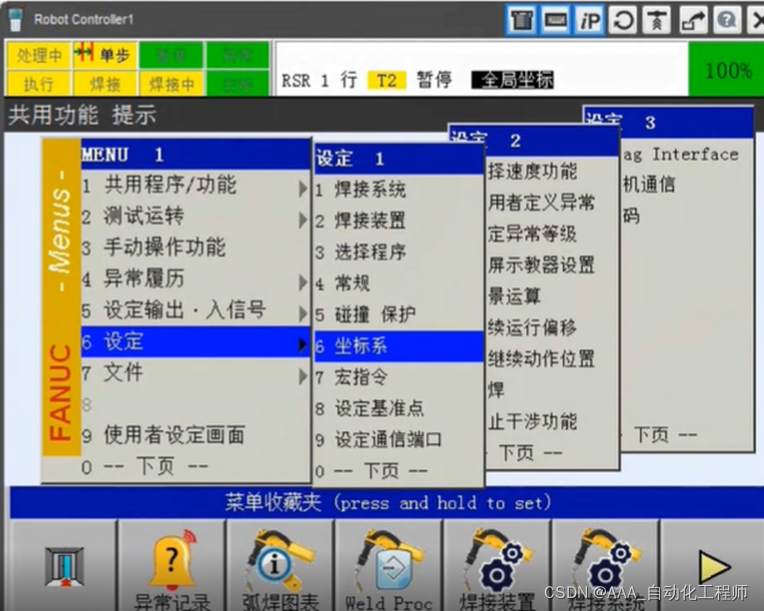
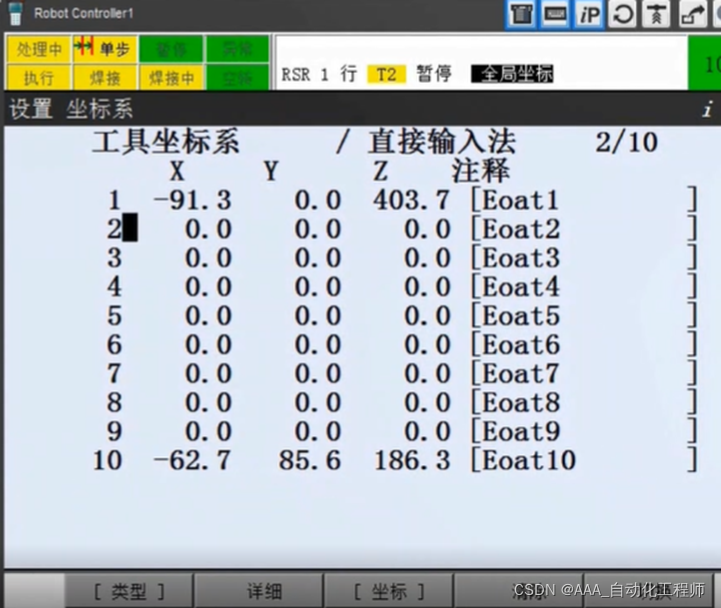
FANUC机器人_三点法设置工具坐标系的具体方法步骤 设置步骤可参考如下: 如下图所示,按下MENU键,选择“设定”—“坐标系”进入设置画面, 移动光标,选择需要设置的工具坐标系号码,下图中选择的是2号工具坐标系, 点击“详细”按键,进入详细设置界面


 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











 超级会员免费看
超级会员免费看
 本文介绍了如何通过FANUC机器人的三点法设置工具坐标系,详细步骤包括选择设定菜单,设定工具坐标系号码,进入详细设置界面,选择三点法,记录接近点1、2、3的位置,最终激活并检查工具坐标系的正确性。
本文介绍了如何通过FANUC机器人的三点法设置工具坐标系,详细步骤包括选择设定菜单,设定工具坐标系号码,进入详细设置界面,选择三点法,记录接近点1、2、3的位置,最终激活并检查工具坐标系的正确性。



 订阅专栏 解锁全文
订阅专栏 解锁全文


























