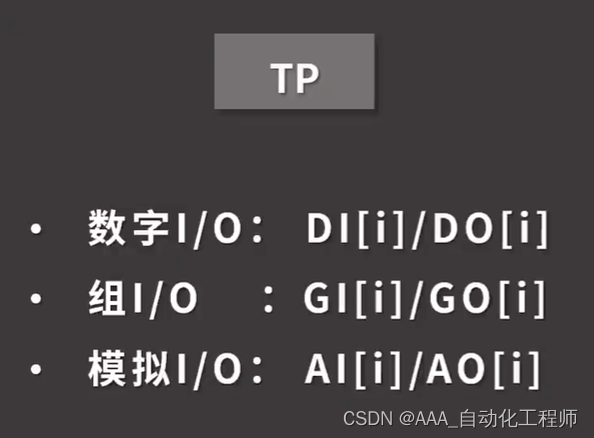
FANUC机器人_KAREL编程入门(2)_通用IO信号的使用方法 使用KAREL程序控制通用IO信号与外围设备或机器人手臂终端工具进行通信 在TP程序中,通用IO信号分为以下三种: 在KAREL程序中,通用IO信号也是这三种,功能都是相同的,但是符号发生了变化,如下图所示,


 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











 超级会员免费看
超级会员免费看
 本文介绍了如何在FANUC机器人KAREL编程中使用通用IO信号与外围设备交互。通过示例展示了TP程序中的判断语句在KAREL中的实现,并讲解了TP程序与KAREL程序的相互调用方法,特别是在ROBOGUIDE环境中添加和编译KAREL程序的步骤。
本文介绍了如何在FANUC机器人KAREL编程中使用通用IO信号与外围设备交互。通过示例展示了TP程序中的判断语句在KAREL中的实现,并讲解了TP程序与KAREL程序的相互调用方法,特别是在ROBOGUIDE环境中添加和编译KAREL程序的步骤。



 订阅专栏 解锁全文
订阅专栏 解锁全文


























