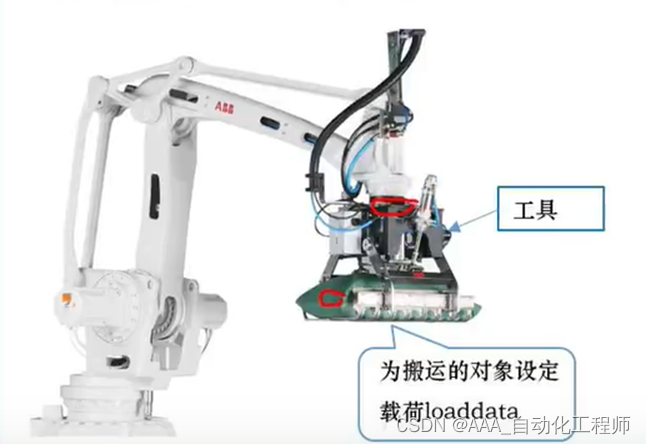
ABB机器人设置有效载荷的2种方法具体步骤(直接输入法+自动识别推算法1) 为什么要设置有效载荷Loaddata? 对于搬运应用的机器人只有设定正确的工具和载荷数据,机器人才能正确的工作; 对于搬运比较重的产品,或工具的重量也比较重,需要设置工具及搬运对象的重心和重量; 对于重量比较轻的负载,如法兰上安装的是焊枪一类的工具,则不需要设定。 载荷数据的设定方法: 直接输入法; 调用服务例行程序(LoadIdentify)进行自动识别与推算负载的重量及重心等参数。


 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











 超级会员免费看
超级会员免费看
 本文详细介绍了ABB机器人设置有效载荷的直接输入法步骤,包括进入有效载荷设置、新建有效载荷、配置重量和重心参数等,确保机器人在搬运重物时能准确工作。
本文详细介绍了ABB机器人设置有效载荷的直接输入法步骤,包括进入有效载荷设置、新建有效载荷、配置重量和重心参数等,确保机器人在搬运重物时能准确工作。


 订阅专栏 解锁全文
订阅专栏 解锁全文


























