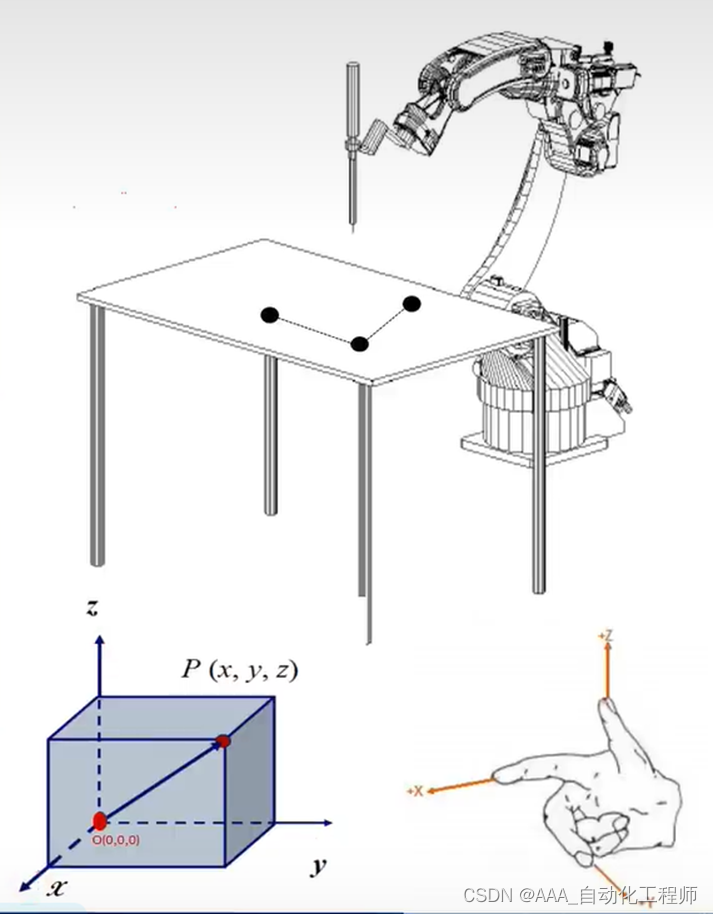
ABB机器人通过3点示教法设置工件坐标系(用户坐标系)的具体方法和步骤 首先来了解一下什么是工件坐标系(用户坐标系)? 机器人工件坐标系是由工件原点和坐标方位组成。工件坐标系以工件为基准来描述TCP运动的直角坐标系。 机器人可以定义多个工件坐标系,来表示不同的工件或表示同一工件在不同的位置。 使用工件坐标系的好处: 当我们在需要工作的工作台建立一个工件坐标系,当工作台重新移位后,此时只需要更改工件坐标系的数据,则所有路径都会随之更新,而不需要再重新一个个点位去示教,提高了编程效率,节省了时间成本。 什


 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











 超级会员免费看
超级会员免费看
 本文介绍了如何使用ABB机器人通过3点示教法设置工件坐标系,包括工件坐标系的意义、具体步骤及在提高编程效率上的优势。详细步骤涉及新建、编辑和定义工件坐标系,以及记录X1、X2和Y1点来确定坐标轴方向。
本文介绍了如何使用ABB机器人通过3点示教法设置工件坐标系,包括工件坐标系的意义、具体步骤及在提高编程效率上的优势。详细步骤涉及新建、编辑和定义工件坐标系,以及记录X1、X2和Y1点来确定坐标轴方向。


 订阅专栏 解锁全文
订阅专栏 解锁全文


























