







<?php
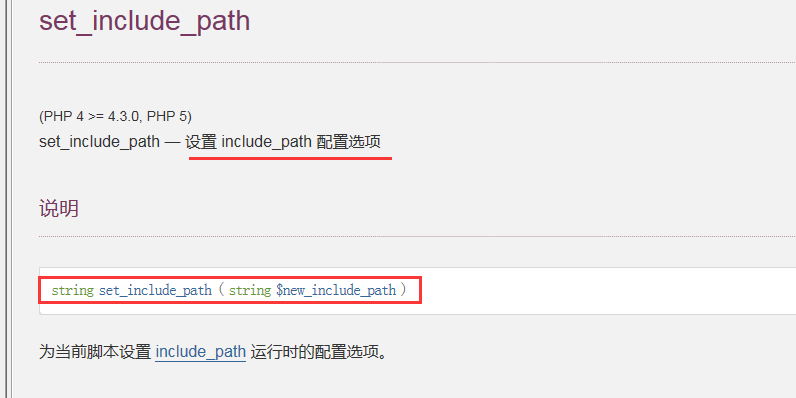
set_include_path('E:\tmp\includes');
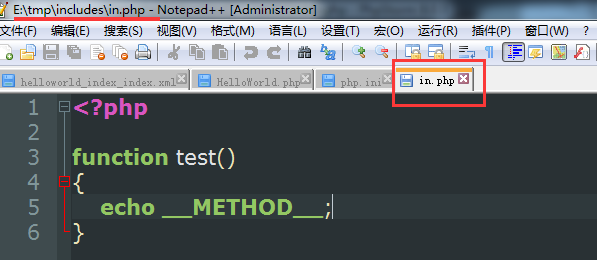
include 'in.php'; //不包含将报错,等于不用包含前缀
test();
<?php
set_include_path('E:\tmp\includes');
include 'in.php'; //不包含将报错,等于不用包含前缀
test(); 547
547











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言























