






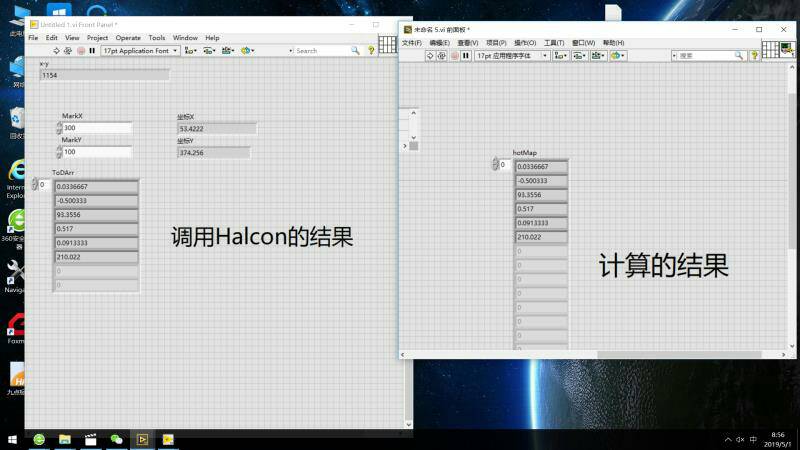
halcon九点标定 手眼标定本源码用labview调用halcon九点标定算法以及labview我们自己总结halcon算法,写出的不用调用halcon的算法,结果一致。
1.调用halcon实现九点标定
2.labview自己算法写出的九点标定
默认2选1
这段话涉及到的知识点和领域范围包括:halcon九点标定算法、labview调用算法、自己编写的九点标定算法。
延申科普:
Halcon九点标定算法是一种用于机器视觉领域的标定方法,它通过使用九个已知位置的特征点来确定相机的内部参数和外部姿态。这些特征点可以是物体上的标记点或者特定的图案。Halcon是一个强大的机器视觉库,提供了丰富的图像处理和分析功能,包括九点标定算法。
LabVIEW是一种图形化编程环境,用于开发控制、测量和数据采集应用程序。它提供了一种直观的方式来构建应用程序,通过将功能模块化并通过线连接来实现程序的流程控制。LabVIEW可以与其他编程语言和库进行集成,包括Halcon。
在提供的选项中,您可以选择使用Halcon提供的九点标定算法,或者使用LabVIEW自己编写的算法来实现九点标定。这两种方法都可以得到一致的结果,具体选择哪种方法取决于您的需求和偏好。
需要注意的是,九点标定算法是机器视觉中的一个重要概念,它在相机标定、姿态估计等领域有广泛的应用。了解和掌握这些算法可以帮助您更好地理解和应用机器视觉技术。
ID:26280593411218309
行走的Cd
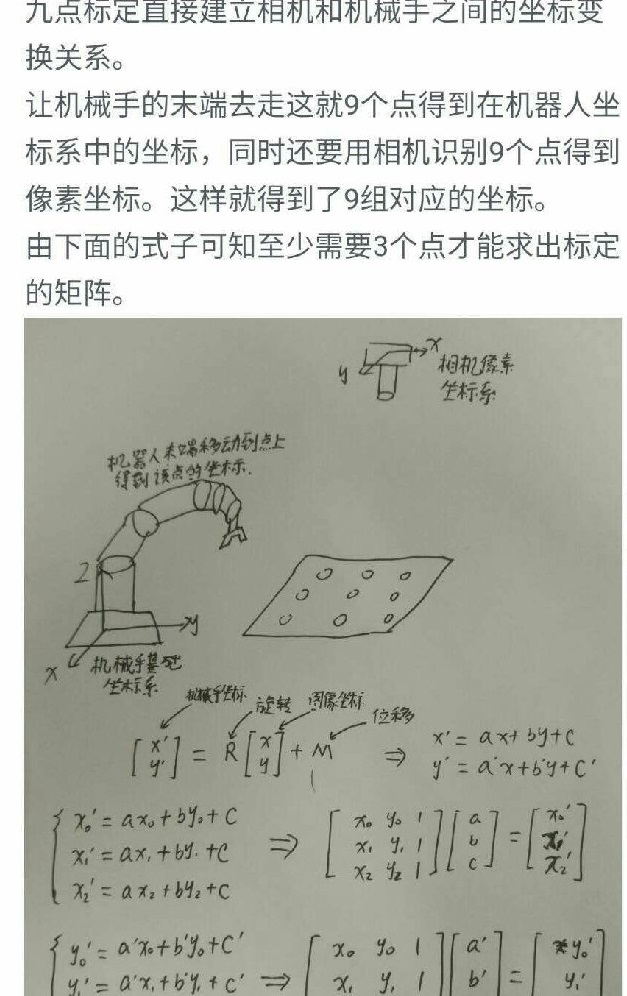
Halcon九点标定算法是一种用于机器视觉领域的标定方法,可以通过使用九个已知位置的特征点来确定相机的内部参数和外部姿态。这些特征点可以是物体上的标记点或者特定的图案。在本文中,我们将介绍如何使用Halcon提供的九点标定算法,并详细讨论如何通过LabVIEW调用该算法。
首先,我们来了解一下Halcon九点标定算法的原理。该算法基于相机模型,通过将已知三维点与对应的二维图像点进行匹配,从而获得相机的内部参数和外部姿态。在进行标定之前,我们需要事先采集一组已知位置的特征点的图像,并记录它们在三维空间中的坐标。
在实际应用中,我们可以使用Halcon提供的九点标定工具来完成这一过程。该工具可以根据已知的三维点和对应的二维图像点,自动计算相机的内部参数和外部姿态。值得一提的是,Halcon还提供了多种标定模型和算法,可以根据实际需求进行选择。
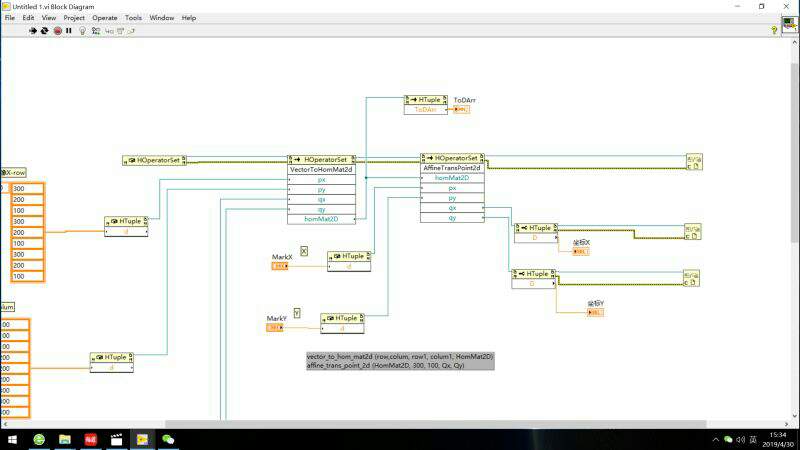
接下来,我们将讨论如何在LabVIEW中调用Halcon的九点标定算法。LabVIEW是一种图形化编程环境,可以用于开发控制、测量和数据采集应用程序。与传统的编程语言相比,LabVIEW提供了一种直观的方式来构建应用程序,通过将功能模块化并通过线连接来实现程序的流程控制。
在LabVIEW中调用Halcon九点标定算法的过程可以分为以下几步:
- 导入Halcon的相关库文件,并配置LabVIEW的环境设置,以便可以调用Halcon的函数和算法。
- 通过图像采集设备获取一组已知位置的特征点的图像。
- 在LabVIEW中编写自定义的算法,用于将图像点与对应的三维点进行匹配。
- 调用Halcon的九点标定函数,传入已匹配的三维点和图像点,计算相机的内部参数和外部姿态。
- 根据需要,可以进一步优化标定结果,例如通过迭代算法进行参数校正。
需要注意的是,LabVIEW提供了丰富的图形化编程工具和函数库,可以方便地进行图像处理和分析。在调用Halcon的九点标定算法之前,我们可以通过LabVIEW的图像处理函数对图像进行预处理,例如去噪、边缘检测等,以提高标定的准确性。
除了Halcon的九点标定算法,我们还可以选择使用LabVIEW自己编写的九点标定算法来实现相同的功能。根据实际需求和具体情况,选择合适的算法可以更好地满足我们的需求。
综上所述,Halcon九点标定算法是一种用于机器视觉领域的重要标定方法,可以通过使用九个已知位置的特征点来确定相机的内部参数和外部姿态。我们可以选择使用Halcon提供的九点标定工具,或者通过LabVIEW自己编写算法来实现标定。无论选择哪种方法,都需要事先采集一组已知位置的特征点的图像,并进行相应的计算和处理。掌握这些算法和工具,可以帮助我们更好地应用机器视觉技术,并在实际应用中取得准确的标定结果。
相关的代码,程序地址如下:http://lanzoup.cn/593411218309.html
















 758
758

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









