






在Android中,我们获取方向有多种方式
1.可以使用指南针直接获取(Sensor.TYPE_ORIENTATION),但是此方法现在已经不推荐使用。
2.可以根据加速度计和磁场共同抽象出角度,此方法计算的原始数据存在噪声,数据不是特别稳定。
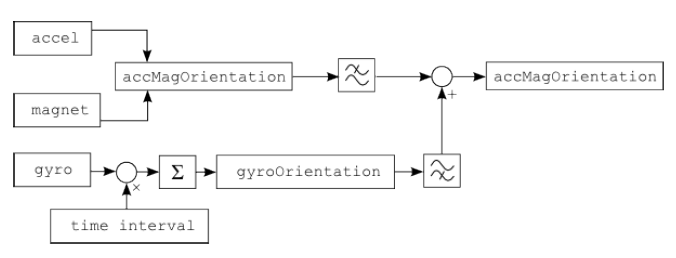
3.使用传感器融合技术,使用设备陀螺仪(偏航角)获取设备自身旋转角度,并且与世界地理磁场做出角度补偿,获取欧拉角修正,使用传感器融合技术可以消除噪声,得到稳定的输出值。
介绍:
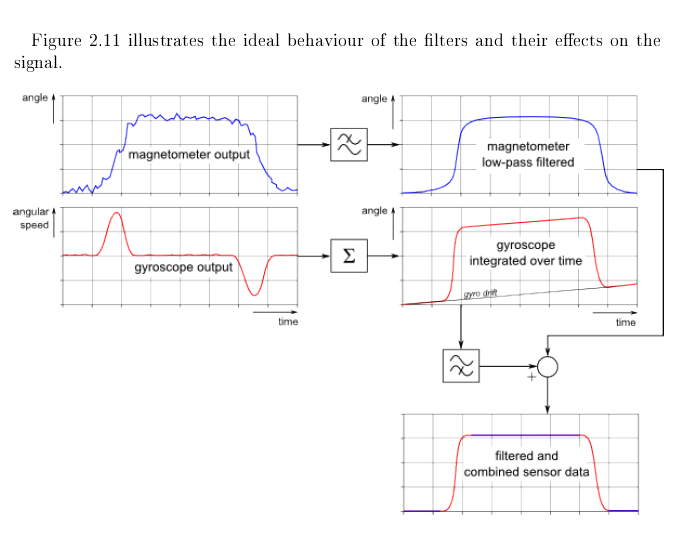
传感器融合消除噪声:
低通滤波器通过平均来平滑抖动信号。组越大,信号越平滑代价是更高的延迟。 它用于处理来自加速度计和指南针的数据。 另一方面,高通滤波器的工作原理就像是一个门,如果它与之前的值相比已经发生了足够的变化,则通过一个值。 陀螺仪只能测量速度,他们需要一个阶段来提供一个方向。 在这种整合过程中,噪音会转化为漂移(陀螺仪漂移),用高通滤波器消除。

相关学术论文下载地址(主要针对VR):http://download.csdn.net/download/eueheuen/10270310
GitHub项目地址:https://github.com/EUEHBin/SenorMerge














 2306
2306











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









