






改进A星算法
剔除冗余节点,光滑转折点
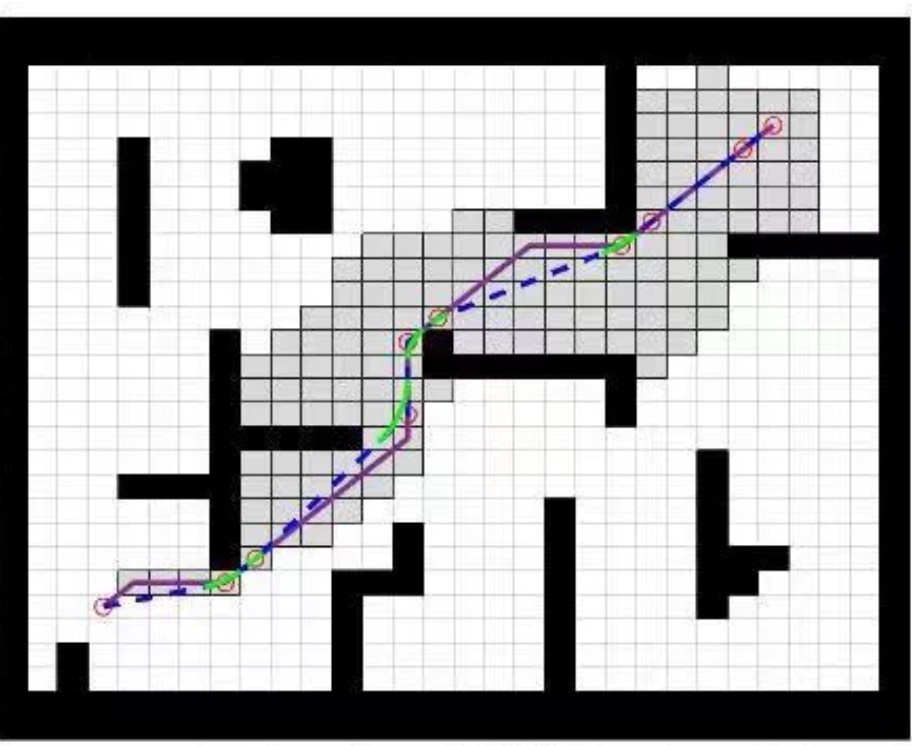
对比优化前后路径。
YID:4116775967070871
单片机小发明
改进A算法对于路径规划算法的性能提升至关重要。本文将着重介绍如何通过剔除冗余节点和光滑转折点的方式,对A算法进行优化,并通过对比优化前后的路径,验证该方法的有效性。
A算法是一种常用的启发式搜索算法,用于寻找图中的最短路径。其核心思想是综合考虑路径上的实际代价和估计代价,以此来评价路径的优劣。然而,传统的A算法在路径生成过程中可能会产生冗余节点,导致路径长度不够优化。因此,我们需要对A*算法进行改进。
首先,我们考虑如何剔除冗余节点。传统的A*算法在每一步选择下一个节点时,并未考虑当前节点与下一个节点之间是否存在多余的转折点。然而,这些转折点可能会导致路径的冗余,影响最终路径的长度。因此,我们可以通过在选择下一个节点时,同时判断当前节点与下下个节点之间是否存在直线可达的路径,如果存在,则可以直接跳过下一个节点,将当前节点与下下个节点相连,从而减少路径上的冗余节点。
其次,我们考虑如何光滑转折点。在实际场景中,转折点过多可能导致路径的曲折性增加,不利于实际导航和行驶。因此,我们可以通过在路径生成过程中,对转折点进行光滑处理,使路径更加流畅。具体方法是,在路径生成过程中,判断每个节点与其相邻节点之间的连线是否存在更短的替代路径。如果存在,则将路径中的转折点替换为更短路径上的节点,从而使路径更加光滑。
最后,我们对比优化前后的路径,以验证我们的优化方法的有效性。通过对比优化前后路径的长度和曲折性,我们可以得出结论,优化后的A*算法能够显著减少路径长度和转折点数量,从而提升路径规划算法的性能。
在实际应用中,我们可以将改进后的A算法应用于无人车导航、机器人路径规划等领域,以提高路径规划的准确性和效率。同时,我们也可以进一步研究如何通过其他优化手段,进一步提升A算法的性能,如使用更精确的估计代价、引入机器学习等方法。
综上所述,通过剔除冗余节点和光滑转折点的方式,我们成功对A*算法进行了改进,并通过对比优化前后路径的长度和曲折性,证明了该方法的有效性。这将为路径规划算法的应用提供重要的思路和方法。
相关的代码,程序地址如下:http://nodep.cn/775967070871.html
















 591
591











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









