









几十年来,人类如何灵活自如地操纵神经义肢一直是生物医学研究的关键领域。神经义肢的核心理念是将人类神经系统与机械肢体直接连接,将神经活动转化为控制信号,使个体能够向义肢发送指令,从而支持残疾者的日常运动活动,并更好地与环境交互。
肌电图(EMG)是解码残肢肌肉周围运动信号的一种方法。EMG信号是动力上肢假肢的常见控制信号,已经使用了50多年。相比之下,对于机械化的、机器人式的下肢假肢的EMG控制仍处于起步阶段。

随着科技的发展,机械式下肢假肢的机械工艺已经变得更加成熟、实用和可行。然而,这些现代机器人设备的功能仍然受到限制。一个主要原因在于这些义肢设备是预先编程的自主机器,无法直接接受用户的神经信号输入。例如,德国的OttoBock公司和冰岛的Össur公司,它们不依赖于活跃的神经肌肉人体输入来进行控制,而是使用运动学传感来驱动预编程活动的自主控制器。这些商业设备基于预定义的状态,如步态阶段(摆动、支撑)和运动模式(爬楼梯、平地行走),来调整膝关节和/或踝关节的阻抗。这种自主假肢在可预测的环境中(如平地)可以积极协助步行运动,但在灵活的日常生活状态下(如在颠簸的地形上行走)则无法提供积极协助。
另一个重要原因是目前残肢肌肉-神经连接的手术技术并不成熟。诸如截肢原因、残肢位置形状、术后肌肉萎缩等多种因素可能直接影响肌肉的运动单位、本体感受器和传入神经元的数量,从而影响假肢控制中的EMG信号质量。此外,下肢截肢普遍的手术目标是重塑残余肢体,但并未考虑到假肢控制神经接口。

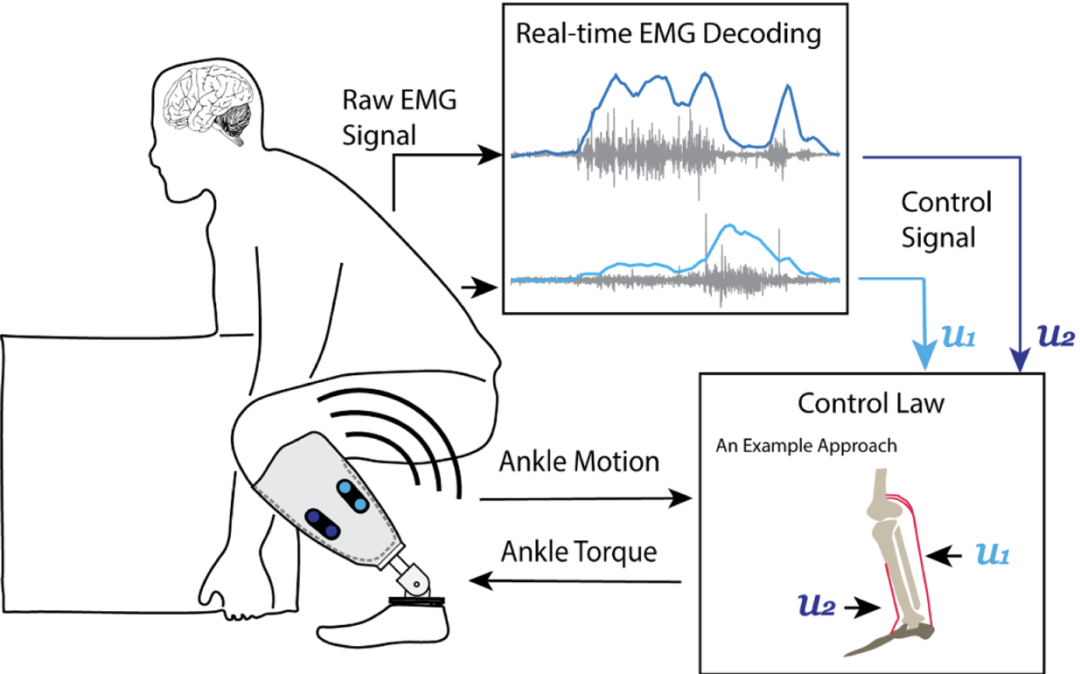
尽管在开发下肢神经义肢的过程中面临重重困难,研究人员在各个方面都在稳步前进。例如,EMG的解码算法和控制框架已经取得了显著的进展。在当前的直接EMG控制中,EMG信号的大小直接而持续地调节假肢关节的动态。各种控制法则可以用于将肌电图活动持续映射到踝关节控制扭矩,以驱动假肢的动态(见下图)。研究发现,将EMG信号与内在机械测量(神经肌肉-机械融合)相结合的模式识别显著提高了运动模式识别的准确性和可靠性,这是通过自主控制难以实现的。EMG控制机器人下肢假肢是备受关注的新领域,在截肢者测试中显示出了可行性和广阔的前景。
此外,一种新的手术技术,肌肉-神经拮抗界面(AMI),试图利用身体天然的本体感觉反馈机制来增强假肢控制和融入感。在AMI中,外科医生重新连接肌肉-神经的拮抗残余肌肉对,以恢复互补肌肉功能。研究显示,接受AMI手术的个体在使用EMG控制的双自由度假肢踝关节时,相较于没有AMI的截肢者,产生了更多的拮抗残余肌肉的独立收缩,并在与步态相关的任务中表现出更好的稳定性。
2023年10月,北卡罗来纳州立大学的研究人员开发了一种利用肌电图(EMG)信号控制的机器人义肢踝关节,旨在为下肢截肢者提供更稳定的支持。该系统迄今已经证明在姿势控制方面发挥了积极作用,涉及到维持平衡和直立所需的复杂而无意识的动作。“这项工作侧重于‘姿势控制’,这是一个惊人的复杂过程,”该技术的开发人员之一Helen Huang表示。“基本上,当我们保持站立不动时,我们的身体会不断进行微调以保持稳定。例如,如果有人在我们排队时碰到我们,我们的腿会进行各种我们可能甚至没有察觉到的运动,以保持我们直立。我们与截肢者合作,他们告诉我们,通过假肢设备实现这种稳定性是一个重大挑战。而这项研究证明,通过使用肌电图(EMG)信号控制的机器人义肢踝关节,用户可以非常好地实现这种自然稳定性。”“基本上,传感器被放置在截肢部位的肌肉上”,参与研究的另一名研究员Aaron Fleming解释道。“当研究参与者思考移动截肢的肢体时,这会通过下肢残余肌肉发送电信号。传感器通过皮肤捕捉这些信号,并将它们转化为对义肢设备的命令。”

总体而言,机器人下肢假肢的应用使得个体的姿势更加稳定,并且允许个体改变其姿势控制策略。这展示了使用EMG控制在机器人下肢假肢中实现新功能的潜力。尽管在未来的研究和临床应用过程中仍然存在一些问题,比如个体是否能够产生足够的肌肉活动、是否能够学会并适应ENG激活、EMG控制是否会增加个体的心理负担,以及在日常实践中EMG信号是否会受到过多噪音等问题,但这也可能引导未来的研究合作,以便为截肢个体构建和转化真正仿生的下肢,从而提高其生活质量和运动体验。
点击蓝字 快来关注

Reference:
https://www.ncbi.nlm.nih.gov/pmc/articles/PMC8694273/
https://www.science.org/doi/10.1126/scirobotics.adf5758
https://corporate.ottobock.com/en/home
https://ossurcn.com/zh-cn/prosthetics/explore-power-knee
https://www.medgadget.com/2023/11/robotic-ankle-helps-with-postural-control-in-amputees.html
文中观点不表明脑极客任何立场,侵权即删


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









