






参考链接:
[1] https://blog.csdn.net/hitwhylz/article/details/23089415
[2] https://zhuanlan.zhihu.com/p/51099376
仿真平台:MATLAB R2018b
说明:算法在点阵图中进行,一个像素相当于一个方格(节点),每个方格周围的8个方格为可到达的方格。启发函数采用曼哈顿距离。
主程序代码main_Astar.m:
%***************************************
%Author: Yiming OU ——2021.06.21
%Filename: main_Astar.m
%***************************************
clear;
clc;
% 初始化地图
pic = imread('map.png'); %读取图像
pic_gray = rgb2gray(pic);
thresh = 0.9; % 根据实际需求取值
map = imbinarize(pic_gray, thresh); % thresh=0.5 表示将灰度128以下的像素全部变为黑色,灰度在128以上的像素全部变为白色。
map = imcomplement(map); %二值取反
%起点坐标和目标点坐标[x, y],分别对应列序号和行序号
q_start = [50, 50];
q_goal = [450, 450];
%% 路径规划
tic
[edges, path, vertices] = Astar(map, q_start, q_goal);%A*算法
toc
% 计算路径长度
lengthofpath = 0;
[path_num, ~] = size(path);
for n = 2 : path_num
lengthofpath = lengthofpath + norm(double(path(n-1, :)) - double(path(n, :)));
end
%% 画图
imshow(int32(1 - map), []);
title('A*');
hold on;
[edgesRowCount, ~] = size(edges);
for ii = 1 : edgesRowCount
plot(vertices(ii, 1), vertices(ii, 2), 'cyan.', 'linewidth', 1);
end
plot(q_start(1), q_start(2), 'rp', 'linewidth', 1);
plot(q_goal(1), q_goal(2), 'r*', 'linewidth', 1);
[pathCount, ~] = size(path);
for ii = 1 : pathCount - 1
plot(path(ii, 1), path(ii, 2), 'r.', 'linewidth', 1);
end
相关函数代码Astar.m:
%***************************************
%Author: Yiming OU ——2021.06.21
%Filename: Astar.m
%***************************************
function [edges, path, vertices] = Astar(map, q_start, q_goal)
if nargin < 3
error('输入参数不足,请提供地图、起点和终点信息');
end
checkInput(map, q_start, q_goal);
[~,mapWidth] = size(map); %地图的宽度
list = zeros(size(map)); %0代表未探索,1代表open,2代表close
index_start = index(q_start, mapWidth); %起始点序号
index_goal = index(q_goal, mapWidth); %目标点序号
edges = int32.empty(0, 2); %1,2列分别为子节点和父节点序号
vertices = q_start; %存放所有遍历过的节点
k = numel(map); %总节点数
q_father = q_start;
%存放节点估计代价,各行分别为节点序号、到起点距离、到目标点曼哈顿距离、估计代价
CostTable = [index_start; 0; Mdistance(q_start, q_goal); Mdistance(q_start, q_goal)];
for ii = 1 : k
costOfQNew = Inf;
index_father = index(q_father, mapWidth);
list(q_father(2), q_father(1)) = 2;
%遍历父节点周围的可到达节点
for i = -1 : 1
for j = -1 : 1
q_son = q_father + [i, j];
index_son = index(q_son, mapWidth);
if ~isNodeFree(map, q_son) || list(q_son(2), q_son(1)) == 2
%子节点位于障碍物或CloseList中
continue;
% elseif isNodeTrapped(q_son, map, list)
% %子节点没有潜在的子节点
% continue;
end
if isequal(q_son, q_goal)
edges = [edges; [index_son, index_father]];
%找到目标点,生成路径
path = findPath(edges, index_start, mapWidth);
return;
end
%计算子节点经q_father的估计代价
[EdOfQSon, MdOfQSon, costOfQSon] = cost(q_son, q_father, index_father, CostTable, q_goal);
if list(q_son(2), q_son(1)) == 1
%子节点在OpenList中
[~, column] = find(CostTable(1, :) == index_son);
if costOfQSon >= CostTable(4, column)
costOfQSon = CostTable(4, column);
else
%更新父节点
[row, ~] = find(edges(:, 1) == index_son);
edges(row, :) = [];
edges = [edges; [index_son, index_father]];
CostTable(:, column) = [];
CostTable = [CostTable, [index_son; EdOfQSon; MdOfQSon; costOfQSon]];
end
else
%子节点未探索过,直接放入edges
edges = [edges; [index_son, index_father]];
CostTable = [CostTable, [index_son; EdOfQSon; MdOfQSon; costOfQSon]];
list(q_son(2), q_son(1)) = 1;
vertices = [vertices; q_son];
end
if costOfQSon < costOfQNew
%找到所有可到达节点中估计代价最小者
q_new = q_son;
index_new = index_son;
costOfQNew = costOfQSon;
end
end
end
q_father = q_new;
end
error('未找到路径。');
end
% 输入参数检查
function checkInput(map, q_start, q_goal)
[mapHeight, mapWidth] = size(map);
if mapWidth < 1 || mapHeight < 1
error('地图尺寸有误,请检查是否输入了正确的二维地图。');
end
[x, y] = size(q_start);
if x ~= 1 || y ~= 2
error('点坐标应为1×2矩阵,如:[20, 30]。');
elseif q_start(1) < 0 || q_start(1) > mapWidth || q_start(2) < 0 || q_start(2) > mapHeight
error('点坐标不能超出地图范围。');
end
[x, y] = size(q_goal);
if x ~= 1 || y ~= 2
error('点坐标应为1×2矩阵,如:[20, 30]。');
elseif q_goal(1) < 0 || q_goal(1) > mapWidth || q_goal(2) < 0 || q_goal(2) > mapHeight
error('点坐标不能超出地图范围。');
end
end
%节点编号
function [in] = index(q, mapWidth)
in = mapWidth*(q(2)-1)+q(1);
in = int32(in);
end
%相邻可到达节点之间欧氏距离
function [Ed] = Edistance(q1, q2)
q1_q2 = q1 - q2;
if q1_q2(1) == 0 && q1_q2(2) == 0
Ed = 0;
elseif q1_q2(1) == 0 || q1_q2(2) == 0
Ed = 10;
else
Ed = 14;
end
Ed = int32(Ed);
end
% 两节点之间曼哈顿距离
function [Md] = Mdistance(q1, q2)
q1_q2 = q1 - q2;
Md = abs(q1_q2(1)) + abs(q1_q2(2));
Md = Md * 10;
Md = int32(Md);
end
% 计算子节点的估计代价
function [di2start, Md2goal, co] = cost(q_son, q_father, index_father, CostTable, q_goal)
[~, column] = find(CostTable(1, :) == index_father); %存放父节点代价信息列向量的列序号
di2start = int32(CostTable(2, column)) + Edistance(q_son, q_father);
Md2goal = Mdistance(q_son, q_goal);
co = int32(di2start + Md2goal);
end
% 节点是否为自由区域,1代表是,0代表否
function [isFree] = isNodeFree(map, q)
[mapHeight, mapWidth] = size(map);
if q(1) < 1 || q(2) < 1 || q(1) > mapWidth || q(2) > mapHeight
isFree = 0;
else
isFree = ~map(q(2), q(1));
end
end
%将节点序号转换为坐标
function coordinate = index2node(index, mapWidth)
x = int32(mod(index, mapWidth));
if x == 0
x = mapWidth;
end
y = int32((index-x)/mapWidth + 1);
coordinate = [x, y];
end
%找到组成路径的节点
function [path] = findPath(edges, index_start, mapWidth)
[edge_num, ~] = size(edges);
index_son = edges(end, 1);
index_father = edges(end, 2);
path = index2node(index_son, mapWidth);
for i = 1 : edge_num
[row, ~] = find(edges(:, 1) == index_father);
index_son = index_father;
path = [path; index2node(index_son, mapWidth)];
index_father = edges(row, 2);
if index_father == index_start
path = [path; index2node(index_start, mapWidth)];
break;
end
end
path = flipud(path);
end
% 判断节点是否拥有子节点
% function [isN] = isNodeTrapped(q, map, list)
%
% for i = -1 : 1
% for j = -1 : 1
%
% if ~i && ~j
% continue;
% end
%
% q_son = q + [i, j];
% if isNodeFree(map, q_son) && list(q_son(2), q_son(1)) ~= 2
% isN = 0;
%
% return;
% end
% end
% end
%
% isN = 1;
% end
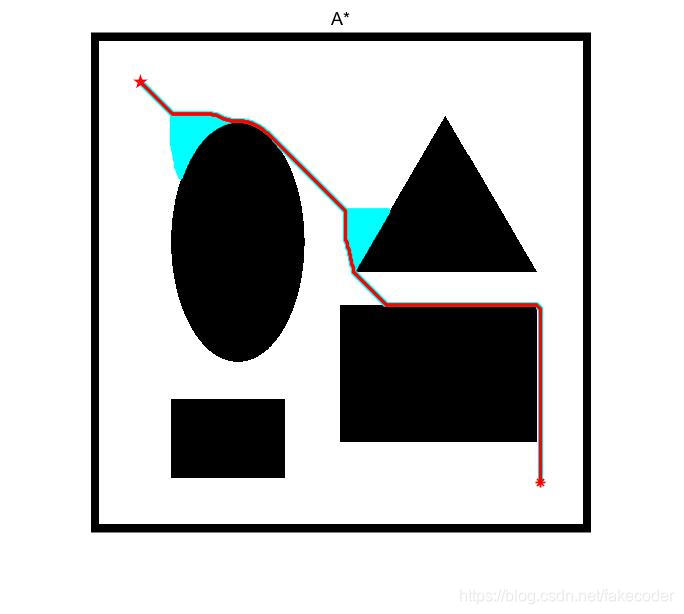
仿真:首先画一张500×500的地图(内有橙色障碍物),保存为map.png。

将main_Astar.m、Astar.m、map.png置于同一路径,直接运行main_Astar.m即可得到结果。红色为路径,浅蓝色为遍历过的方格(像素点)。
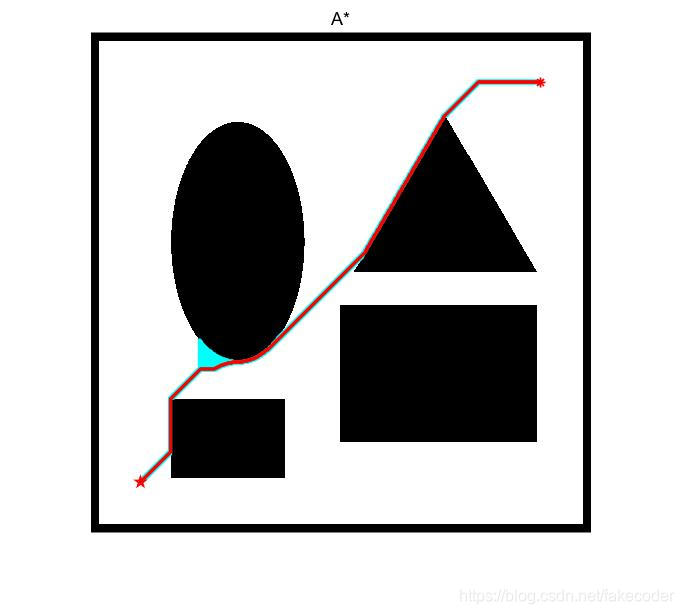
将起始点和终点加以改变,又可得到下面结果:


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









