







非极大值抑制(Non-maximum suppression,NMS)是一种去除非极大值的算法,常用于计算机视觉中的边缘检测、物体识别等。
算法流程
给出一张图片和上面许多物体检测的候选框(即每个框可能都代表某种物体),但是这些框很可能有互相重叠的部分,我们要做的就是只保留最优的框。假设有N个框,每个框被分类器计算得到的分数为 S i , ( 1 < = i < = N ) S_i, (1<=i<=N) Si,(1<=i<=N)。
-
建造一个存放待处理候选框的集合H,初始化为包含全部N个框;建造一个存放最优框的集合M,初始化为空集。
-
将所有集合 H 中的框进行排序,选出分数最高的框 m,从集合 H 移到集合 M;
-
遍历集合 H 中的框,分别与框 m 计算交并比(Interection-over-union,IoU),如果高于某个阈值(一般为0~0.5),则认为此框与 m 重叠,将此框从集合 H 中去除。
-
回到第1步进行迭代,直到集合 H 为空。集合 M 中的框为我们所需。
需要优化的参数
IoU 的阈值是一个可优化的参数,一般范围为0~0.5,可以使用交叉验证来选择最优的参数。
示例
比如人脸识别的一个例子:
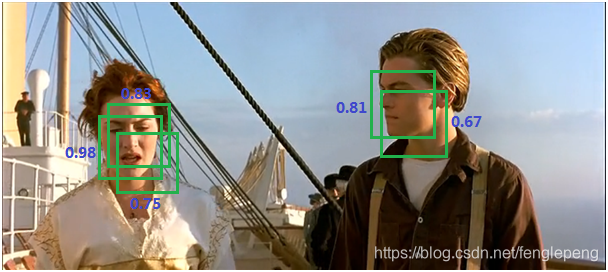
已经识别出了 5 个候选框,但是我们只需要最后保留两个人脸。
首先选出分数最大的框(0.98),然后遍历剩余框,计算 IoU,会发现露丝脸上的两个绿框都和 0.98 的框重叠率很大,都要去除。
然后只剩下杰克脸上两个框,选出最大框(0.81),然后遍历剩余框(只剩下0.67这一个了),发现0.67这个框与 0.81 的 IoU 也很大,去除。
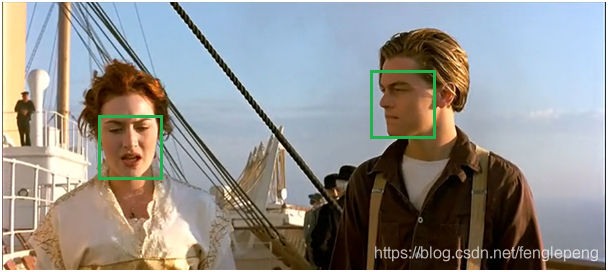
至此所有框处理完毕。
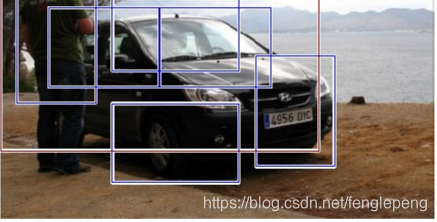
再比如定位一个车辆,最后算法就找出了一堆的方框,我们需要判别哪些矩形框是没用的。非极大值抑制:先假设有6个矩形框,根据分类器类别分类概率做排序,从小到大分别属于车辆的概率分别为A、B、C、D、E、F。
(1)从最大概率矩形框F开始,分别判断A~E与F的重叠度IOU是否大于某个设定的阈值;
(2)假设B、D与F的重叠度超过阈值,那么就扔掉B、D;并标记第一个矩形框F,是我们保留下来的。
(3)从剩下的矩形框A、C、E中,选择概率最大的E,然后判断E与A、C的重叠度,重叠度大于一定的阈值,那么就扔掉;并标记E是我们保留下来的第二个矩形框。
就这样一直重复,找到所有被保留下来的矩形框A、E。
代码
import numpy as np
def py_cpu_nms(dets, thresh):
# 单独获取各个参数,以下参数shape = (5,)
x1 = dets[:,0]
y1 = dets[:,1]
x2 = dets[:,2]
y2 = dets[:,3]
scores = dets[:,4]
areas = (y2-y1+1) * (x2-x1+1)
print("areas.shape: {}".format(areas.shape))
print("areas: {}".format(areas))
keep = []
# 得分按照由高到低排序的索引, index.shape = (6,)
index = scores.argsort()[::-1]
print("index.shape: {}".format(index.shape))
print("index: {}".format(index))
while index.size >0:
# i为得分最高的索引
i = index[0]
# 将得分最高的索引追加到列表中
keep.append(i)
# 计算两个box左上角点坐标的最大值x11、y11和右下角坐标的最小值x22、y22
# x11、y11、x22、y22 shape = (5,)
x11 = np.maximum(x1[i], x1[index[1:]])
y11 = np.maximum(y1[i], y1[index[1:]])
x22 = np.minimum(x2[i], x2[index[1:]])
y22 = np.minimum(y2[i], y2[index[1:]])
print("index[1:]: {}".format(index[1:]))
print("x1[index[1:]]: {}".format(x1[index[1:]]))
print("x11: {}".format(x11))
print("x11.shape: {}".format(x11.shape))
# 当两个方框相交时,22-11最后得到w,h是正值
# 当两个方框不相交的时候,22-11最后得到w,h是负值,则设置为0
# w、h shape = (5,)
w = np.maximum(0, x22-x11+1)
h = np.maximum(0, y22-y11+1)
print("w: {}".format(w))
print("w.shape: {}".format(w.shape))
# 计算交集面积
# overlaps.shape = (5,)
overlaps = w * h
print("overlaps: {}".format(overlaps))
print("overlaps.shape: {}".format(overlaps.shape))
# 计算交并比
# ious.shape = (5,)
ious = overlaps / (areas[i] + areas[index[1:]] - overlaps)
print("ious.shape: {}".format(ious.shape))
print("ious: {}".format(ious))
# 得到满足阈值条件的ious中的索引(ious相比index缺少第一个最大值)
ious_idx = np.where(ious<=thresh)[0]
print("ious<=thres idx: {}".format(ious_idx))
# ious_idx+1得到在index中的索引
index = index[ious_idx + 1] # because index start from 1
print("index: {}".format(index))
return keep
if __name__ == "__main__":
boxes=np.array([[100,100,210,210,0.72], # 0
[250,250,420,420,0.8], # 1
[220,220,320,330,0.92], # 2
[100,100,210,210,0.72], # 3
[230,240,325,330,0.81], # 4
[220,230,315,340,0.9]]) # 5
keep = py_cpu_nms(boxes, thresh=0.7)
print("keep: {}".format(keep))














 3096
3096











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









