









 本文介绍了一种生成蓝噪声模板的voidandcluster算法,该算法用于图像的半色调处理,通过计算图像点能量,查找最大空间或聚集点,最终生成0至N*N之间的唯一值模板。
本文介绍了一种生成蓝噪声模板的voidandcluster算法,该算法用于图像的半色调处理,通过计算图像点能量,查找最大空间或聚集点,最终生成0至N*N之间的唯一值模板。
最近一直在关注半色调算法。其中的蓝噪声模板法算法简单、运行速度快,是半色调算法中一种常用算法。void and cluster算法是一种常用的生成蓝噪声模板的方法。这几天认真研究了这一算法,特将算法的基本情况作一简单梳理,方便以后查阅。
算法的目标:
生成一个用于对图像进行半色调处理的蓝噪声模板。对一个N*N的初始数组,通过算法处理后,数组的元素值是0-(N*N-1)之间的。用于半色调处理时,需要进行归一化。
算法的主要思想:
通过计算一个1位(只有黑和白,也就是0和1)的BINARAY图像的所有点的能量,利用VOID(空间)和CLUSTER(聚集)的思想,查找最大的VOID(空间)或CLUSTER(聚集)点,并将所在位置的图像设置为1或者0,并按一定规则将数字写到蓝噪声模板相应位置,最后BINARAY图像中的所有点都为1, 同时蓝噪声模板所有位置的数字设置完成。
算法的先期条件:
1、一种用于计算BINARAY图像中的每个点到每个少数点(数值为1的点)的能量函数。一个类似于高斯函数的函数,因为这个算法计算出来的蓝噪声模板是正方形的,是对称的,所以的这个函数的形式为![]() ,其中,R是两个点之间的欧式距离。
,其中,R是两个点之间的欧式距离。是常数1.5。有了每个点的能量函数 ,就可以用来寻找最大的VOID(空间)或CLUSTER(聚集)点。
2、一个初始化为蓝噪声特性的BINARAY图像,这个图像可用误差扩散算法或者其他半色调算法生成的,也可以是由随机函数生成的白噪声图像优化得来。
算法的主要流程:
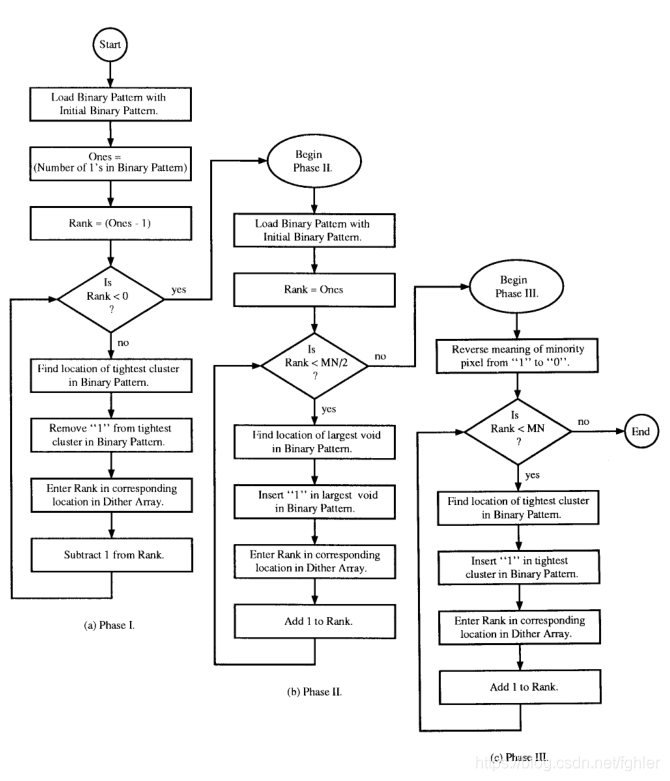
第一阶段:计算BINARAY图像中值为1的点的个数RANK,查找最大的CLUSTER的点,将这个点设为0,将RANK的值写入到蓝噪声模板的相应位置,RANK-1,而后进行迭代。结束时,蓝噪声模板中已经有0-(RANK-1)的值了。
第二阶段:此时用的BINARAY图像为初始的,不是第一阶段处理后的。查找最大的VOID的点,将这个点设为1,将RANK的值写入到蓝噪声模板的相应位置,RANK+1,而后进行迭代,直至RANK<N*N/2。结束时,蓝噪声模板已经有0-N*N/2之间的值了。
第三阶段:计算第二阶段后的BINARAY图像中值1的点到值为0的点的能量,而后再继续查找最大的VOID的点,将这个点设为1,将RANK的值写入到蓝噪声模板的相应位置,RANK+1,而后进行迭代,直至RANK<N*N。结束时,蓝噪声模板已经有0-N*N之间的值了。结束时,蓝噪声模板中所有位置都相应的值了,这个值在0-N*N之间,且互不相等。
注意:
这里只是自己的理解,有些地方写的不是很详细明确,有什么问题可以私信交流。

















 5299
5299

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









